También podría gustarte
- Actividad de Aprendizaje 4. La Crisis Económica de 2008 en La Industria Automotriz en MéxicoDocumento7 páginasActividad de Aprendizaje 4. La Crisis Económica de 2008 en La Industria Automotriz en MéxicoAnonymous iLvWObjGG33% (3)
- Trabajo Práctico Número Tres. Personas Jurídicas (Sociedades)Documento6 páginasTrabajo Práctico Número Tres. Personas Jurídicas (Sociedades)Joaquin BringasAún no hay calificaciones
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311De EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Calificación: 2 de 5 estrellas2/5 (1)
- Metodología básica de instrumentación industrial y electrónicaDe EverandMetodología básica de instrumentación industrial y electrónicaCalificación: 4 de 5 estrellas4/5 (12)
- Descargo LaboralDocumento7 páginasDescargo LaboralLUCIANO JACOB0% (1)
- Automatizacion de FlotacionDocumento68 páginasAutomatizacion de FlotacionNataniel Linares100% (3)
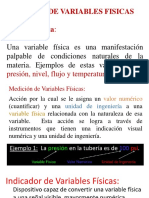
- Medicion Variables FisicasDocumento88 páginasMedicion Variables FisicasEdison Quinapallo100% (3)
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108De EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Aún no hay calificaciones
- Tesis Comerciantes InformalesDocumento137 páginasTesis Comerciantes Informalesabner100% (2)
- InstrumentacionDocumento162 páginasInstrumentacionPables Diurno FigueroaAún no hay calificaciones
- CONTROL DE PROCESOS-01Documento30 páginasCONTROL DE PROCESOS-01Jose DiazAún no hay calificaciones
- E04Documento35 páginasE04Maity FerAún no hay calificaciones
- Introducción A Los Sistemas Discretos 2013-2Documento12 páginasIntroducción A Los Sistemas Discretos 2013-2diosmarsempunAún no hay calificaciones
- CLASE No.06 MARZO 01 2023Documento48 páginasCLASE No.06 MARZO 01 2023Obed HerreraAún no hay calificaciones
- CP Semana6 InstrumentaciónDocumento133 páginasCP Semana6 InstrumentaciónJean pool Moya ccayoAún no hay calificaciones
- Curso de Instrumentacion Basica IDocumento107 páginasCurso de Instrumentacion Basica IMiguel Monterrey100% (1)
- Transmisores InstrumentacionDocumento23 páginasTransmisores InstrumentacionhelelendidoAún no hay calificaciones
- InstrumentDocumento149 páginasInstrumentsandraluz73Aún no hay calificaciones
- Sistemas de Control1Documento22 páginasSistemas de Control1LeopoldoPavesiAún no hay calificaciones
- Compresor de Velocidad VariableDocumento129 páginasCompresor de Velocidad VariableAngélica MontalvoAún no hay calificaciones
- Sensores ActuadoresDocumento41 páginasSensores ActuadoresLuis Gonzales SalazarAún no hay calificaciones
- SEMANA N°2 Instrumentación IndustrialDocumento49 páginasSEMANA N°2 Instrumentación IndustrialWilly Alexander López AlvaAún no hay calificaciones
- Especificaciones de La INSTRUMENTACIÓNDocumento34 páginasEspecificaciones de La INSTRUMENTACIÓNEdwin J. MAún no hay calificaciones
- Control de Procesos InstrumentaciónDocumento149 páginasControl de Procesos InstrumentaciónAndres HerretaAún no hay calificaciones
- Control de ProcesosDocumento26 páginasControl de ProcesosGalo Alfonso Candela ChiribogaAún no hay calificaciones
- AUTOMATISMODocumento68 páginasAUTOMATISMOJean Carlos Huerta DiazAún no hay calificaciones
- Actividad #1 Resumen de Temas IntroductoriosDocumento56 páginasActividad #1 Resumen de Temas IntroductoriosYeraldine Rodríguez WilletAún no hay calificaciones
- FestoDocumento3 páginasFestocarlos andres barrera chinomeAún no hay calificaciones
- Vii - Automatizacion de FlotacionDocumento68 páginasVii - Automatizacion de FlotacionLuis Sebastián Ford100% (2)
- Modulo 4 - Controladores Lógicos ProgramablesDocumento133 páginasModulo 4 - Controladores Lógicos ProgramablespriepabloAún no hay calificaciones
- Automatismos y Control Sistemas Basicos Control IndustrialDocumento21 páginasAutomatismos y Control Sistemas Basicos Control IndustrialFranc MacAún no hay calificaciones
- Que Son Los SensoresDocumento4 páginasQue Son Los SensoresRene CifuentesAún no hay calificaciones
- Tipos y Procesos de Medición de Variables en Un Proceso IndustrialDocumento18 páginasTipos y Procesos de Medición de Variables en Un Proceso Industrialmilenko CortesAún no hay calificaciones
- Guia de Instrumentacion Electronica 1er Corte 20%Documento22 páginasGuia de Instrumentacion Electronica 1er Corte 20%Jearlinis Arana100% (1)
- Elemento Primario o SensorDocumento13 páginasElemento Primario o SensorAlejandra Trejo100% (1)
- S1.s2 MaterialDocumento51 páginasS1.s2 MaterialCarlos DanielAún no hay calificaciones
- Unidad 5 Control Asistido Por Computadora.Documento22 páginasUnidad 5 Control Asistido Por Computadora.Ricardo Hernandez bustosAún no hay calificaciones
- Lazo Abierto y CerradoDocumento12 páginasLazo Abierto y CerradoMiguel BurgosAún no hay calificaciones
- Curso de ControlDocumento66 páginasCurso de ControlDaniel MercadoAún no hay calificaciones
- PLC Tratamiento Señales AnalogasDocumento12 páginasPLC Tratamiento Señales AnalogasJohan Andres Rodriguez CortesAún no hay calificaciones
- Instrumentos de Medición - 1Documento20 páginasInstrumentos de Medición - 1Jose Alberto Fierro VasquezAún no hay calificaciones
- Controlador PidDocumento5 páginasControlador PidEliakin Sabrera IngaAún no hay calificaciones
- Control CL6 Panel FrontalDocumento20 páginasControl CL6 Panel FrontalIgnacio Adolfo Matamala Almendras100% (1)
- Preguntas de ControlDocumento4 páginasPreguntas de Controlharry_gomez18Aún no hay calificaciones
- 3.4 Introduccion A Control Digital PDFDocumento80 páginas3.4 Introduccion A Control Digital PDFJohann Smith Aranda RamosAún no hay calificaciones
- Tema 5 - Dispositivos PDFDocumento21 páginasTema 5 - Dispositivos PDFYohaly PerezAún no hay calificaciones
- Control de Procesos PlantaDocumento80 páginasControl de Procesos Plantasfsgdrg100% (1)
- apunte 1 taller 5°Documento6 páginasapunte 1 taller 5°alexmartinez.lxcAún no hay calificaciones
- Pci-1101 - Clase Nº4 - Normas de Instrumentación PDFDocumento32 páginasPci-1101 - Clase Nº4 - Normas de Instrumentación PDFSebastian Jofre ValenzuelaAún no hay calificaciones
- TAREA 3 InstrumentacionDocumento3 páginasTAREA 3 InstrumentacionJefferson RodriguezAún no hay calificaciones
- Caracteristicas Sistemas Instrumentacion UnioviDocumento36 páginasCaracteristicas Sistemas Instrumentacion UnioviPaula HurtadoAún no hay calificaciones
- Presentación PLC Easy Moeller MDF-TitanDocumento12 páginasPresentación PLC Easy Moeller MDF-TitanJulio ZambranaAún no hay calificaciones
- 0 Introduccion A La Automatizacion y ControlDocumento52 páginas0 Introduccion A La Automatizacion y ControlMayraAlejandraNizamaChavez100% (1)
- 3.4 Introduccion A Control Digital 2Documento80 páginas3.4 Introduccion A Control Digital 2Edson C HuanquisAún no hay calificaciones
- Componentes Básicos de Un Sistema de ControlDocumento14 páginasComponentes Básicos de Un Sistema de Controlluis9725Aún no hay calificaciones
- Separata 1 PDFDocumento19 páginasSeparata 1 PDFCristian Uchasara CasavilcaAún no hay calificaciones
- Portafolio de Evidencias Humberto Gracia NevarezDocumento27 páginasPortafolio de Evidencias Humberto Gracia NevarezHumberto Gracia NevarezAún no hay calificaciones
- Cajamarca - Peru Cel: 946392358Documento26 páginasCajamarca - Peru Cel: 946392358luis albertAún no hay calificaciones
- PDFDocumento11 páginasPDFFlores KuAún no hay calificaciones
- DiapositivasDocumento24 páginasDiapositivasFredyAún no hay calificaciones
- Filtro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoDe EverandFiltro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoAún no hay calificaciones
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311De EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Calificación: 4.5 de 5 estrellas4.5/5 (2)
- Control y verificación de productos fabricados. FMEE0108De EverandControl y verificación de productos fabricados. FMEE0108Aún no hay calificaciones
- Prácticas de redes de datos e industrialesDe EverandPrácticas de redes de datos e industrialesCalificación: 4 de 5 estrellas4/5 (5)
- Acuerdo Gubernativo 188-2013 (Oposición)Documento3 páginasAcuerdo Gubernativo 188-2013 (Oposición)riocas100% (2)
- Vademecum Profesional MobileDocumento27 páginasVademecum Profesional Mobilejuliana buitragoAún no hay calificaciones
- Tipos de CalibradoresDocumento5 páginasTipos de CalibradoresFlavio Gallegos Hernandez67% (9)
- Sosega9 fc3808d2f8Documento1 páginaSosega9 fc3808d2f8lenacradle100% (1)
- LatinNCAP Todos Los Resultados 2019-2016Documento3 páginasLatinNCAP Todos Los Resultados 2019-2016jonathancuellararangoAún no hay calificaciones
- Sas-Grupo 4Documento28 páginasSas-Grupo 4Olenka LazaroAún no hay calificaciones
- La Revuelta de Los ComunerosDocumento3 páginasLa Revuelta de Los ComunerosÁlvaro Rivas GodinAún no hay calificaciones
- Memorias Taller Compostaje Earthgreen #27Documento60 páginasMemorias Taller Compostaje Earthgreen #27diego83777Aún no hay calificaciones
- Taller Pyg Perfecto para EnsayarDocumento7 páginasTaller Pyg Perfecto para EnsayarFabio Jose RengifoAún no hay calificaciones
- Foro Sistema Defensivo Ensayo Nº1Documento5 páginasForo Sistema Defensivo Ensayo Nº1Jesus LinaresAún no hay calificaciones
- Portafolio CR y La GlobalizaciónDocumento10 páginasPortafolio CR y La GlobalizaciónMairene CastroAún no hay calificaciones
- Tecnicas de Investigación FinancieraDocumento63 páginasTecnicas de Investigación FinancieraahudelAún no hay calificaciones
- Calculos Electricos COMPLETODocumento43 páginasCalculos Electricos COMPLETOJulisa Córdova PeñaAún no hay calificaciones
- Estrategias de Negocios InternacionalesDocumento2 páginasEstrategias de Negocios InternacionalesBriiza Othón Gutiérrez100% (5)
- Informegrupal G5Documento51 páginasInformegrupal G5Valeska CarrionAún no hay calificaciones
- Examen Trabajo Práctico 4 Formulacion y Evaluac de Proy TP4 FerDocumento13 páginasExamen Trabajo Práctico 4 Formulacion y Evaluac de Proy TP4 FerMaría Inés GSAún no hay calificaciones
- Interventoría para Argelia (Fomvas) - 20/06/2019Documento5 páginasInterventoría para Argelia (Fomvas) - 20/06/2019Sucre NoticiasAún no hay calificaciones
- Plan de Estudios Ingenieria Mecanica IndustrialDocumento2 páginasPlan de Estudios Ingenieria Mecanica Industrialcesar martinezAún no hay calificaciones
- RETDocumento12 páginasRETAmparo Ramírez VictoriaAún no hay calificaciones
- Configurar Modem Tenda D840R para ABA de CANTV - Taringa! PDFDocumento6 páginasConfigurar Modem Tenda D840R para ABA de CANTV - Taringa! PDFingente20Aún no hay calificaciones
- Cierre de AlmacenDocumento9 páginasCierre de AlmacenJesse GomezAún no hay calificaciones
- Diseño ExperimentalDocumento2 páginasDiseño ExperimentalMarla Sofía Sánchez VélezAún no hay calificaciones
- Anexos ExDocumento8 páginasAnexos ExLiliana Valencia CueroAún no hay calificaciones
- Informe-Preliminar-Ssu - RS Vii - FinalllDocumento21 páginasInforme-Preliminar-Ssu - RS Vii - FinallljhonAún no hay calificaciones
- Insercion ComunitariaDocumento13 páginasInsercion Comunitariasuarezheredia30Aún no hay calificaciones
- Autoría de SistemasDocumento2 páginasAutoría de SistemasTOMASA PAHOLA CONOZ SUYAún no hay calificaciones