También podría gustarte
- Control Potencia FrecuenciaDocumento53 páginasControl Potencia FrecuenciaPaulSimbaAún no hay calificaciones
- Lopez PHDocumento254 páginasLopez PHMINERAún no hay calificaciones
- Normas de Alumbrado PublicoDocumento6 páginasNormas de Alumbrado PublicoPuche JesusAún no hay calificaciones
- Reporte PLC's PDFDocumento7 páginasReporte PLC's PDFLuis RosborjAún no hay calificaciones
- Segundo Parcial Sep 1Documento20 páginasSegundo Parcial Sep 1Andrés KillerCatAún no hay calificaciones
- Manual Alumbrado Publico (Energizacion)Documento12 páginasManual Alumbrado Publico (Energizacion)Sergio LimaAún no hay calificaciones
- Transitorios ElectromagnéticosDocumento2 páginasTransitorios ElectromagnéticosYasmin CarolinaAún no hay calificaciones
- Presentación Proyecto de PLCDocumento20 páginasPresentación Proyecto de PLCJoseAún no hay calificaciones
- Matriz de Consist en CIA - Estilos de LiderazgoDocumento3 páginasMatriz de Consist en CIA - Estilos de LiderazgoJavier Angel Huaranga ContrerasAún no hay calificaciones
- Fenómenos TransitoriosDocumento35 páginasFenómenos TransitoriosAngel FullerAún no hay calificaciones
- Estabilidad Dinamica y EstaticaDocumento61 páginasEstabilidad Dinamica y EstaticacjclaveroAún no hay calificaciones
- Protección de Generadores Sincronos (Para La Expo)Documento51 páginasProtección de Generadores Sincronos (Para La Expo)pipus07Aún no hay calificaciones
- Ecuación de Oscilación Del Generador y Métodos de Solución Listo2Documento10 páginasEcuación de Oscilación Del Generador y Métodos de Solución Listo2Luysyñño ChAún no hay calificaciones
- Control Automatico de Generacion, AcgDocumento3 páginasControl Automatico de Generacion, Acgnectelur_1990100% (1)
- Control de La GeneraciónDocumento100 páginasControl de La GeneracióndiegolaglaAún no hay calificaciones
- Informe Estabilidad de Sistemas de PotenciaDocumento5 páginasInforme Estabilidad de Sistemas de PotenciaBryan VarelaAún no hay calificaciones
- Tipos de AmortiguamientoDocumento7 páginasTipos de AmortiguamientoKevin HiguitaAún no hay calificaciones
- Despacho EconomicoDocumento29 páginasDespacho EconomicoCarlosAún no hay calificaciones
- Procesamiento Digital de Señales (Posible de Telematica Dos)Documento2 páginasProcesamiento Digital de Señales (Posible de Telematica Dos)Anonymous 5qQ7p62J7Aún no hay calificaciones
- Transitorios ISA Colombia 2010Documento146 páginasTransitorios ISA Colombia 2010juliocarlos282Aún no hay calificaciones
- 4.1 4.2 y 4.3 de Máquinas SincronicasDocumento26 páginas4.1 4.2 y 4.3 de Máquinas SincronicasEmanuel PayneAún no hay calificaciones
- Tema 2 Control de Generación y de TensiónDocumento64 páginasTema 2 Control de Generación y de Tensiónrocio_martin_921241Aún no hay calificaciones
- Capitulo 2.8 Estabilidad MultimaquinasDocumento16 páginasCapitulo 2.8 Estabilidad Multimaquinasmayquer lin delgadillo perez100% (1)
- Clase 2 - Problemas-1Documento43 páginasClase 2 - Problemas-1Junior CQAún no hay calificaciones
- 1 - Teoria Regulación de FrecuenciaDocumento23 páginas1 - Teoria Regulación de FrecuenciaRonald Arzapalo CordovaAún no hay calificaciones
- Proyecto Nº26. Riego Automático de Un Campo de Césped ArtificialDocumento3 páginasProyecto Nº26. Riego Automático de Un Campo de Césped ArtificialAlfredo Fernández MenesesAún no hay calificaciones
- Estabilidad Pequeña SeñalDocumento18 páginasEstabilidad Pequeña Señaljhussen17Aún no hay calificaciones
- U4 4.4 Falla A Tierra en El EstatorDocumento11 páginasU4 4.4 Falla A Tierra en El EstatorRudyard Alejandro Everardo RamosAún no hay calificaciones
- BurdenDocumento4 páginasBurdenLuis HRAún no hay calificaciones
- IEEE - Transformadores - Unidad 2Documento6 páginasIEEE - Transformadores - Unidad 2Alejandro Herrera SanchezAún no hay calificaciones
- Cargabilidad - Mejor Ejercicio PDFDocumento15 páginasCargabilidad - Mejor Ejercicio PDFTaloNatalacioAún no hay calificaciones
- Guiadeherramientasgraficasconminitab 121130185908 Phpapp01Documento23 páginasGuiadeherramientasgraficasconminitab 121130185908 Phpapp01danvanplaAún no hay calificaciones
- Arranque Con Autotransformador Con Motor Electrico Jaula de ArdillaDocumento10 páginasArranque Con Autotransformador Con Motor Electrico Jaula de ArdillaCERVANTES FERNANDEZ MIJAELAún no hay calificaciones
- Cuando Una Corriente Circula Por Un Conductor Embobinado Con N VueltasDocumento6 páginasCuando Una Corriente Circula Por Un Conductor Embobinado Con N VueltasDaniel Maciel Ruiz100% (1)
- Control Automatico de GeneracionDocumento5 páginasControl Automatico de GeneracionJesus Vasquez Palomino100% (1)
- Ciclo-09-Ie-Estabilidad de Sistemas de Potencia PDFDocumento8 páginasCiclo-09-Ie-Estabilidad de Sistemas de Potencia PDFLuis Espichan RiquelmeAún no hay calificaciones
- Resumen Sobre Efectos de La Variación de Frecuencia PDFDocumento3 páginasResumen Sobre Efectos de La Variación de Frecuencia PDFJenny Jose T. AverosAún no hay calificaciones
- Estabilidad CLASE 2Documento33 páginasEstabilidad CLASE 2David Gallegos100% (2)
- Características Del Análisis de Estabilidad en SEPDocumento30 páginasCaracterísticas Del Análisis de Estabilidad en SEPsedepes100% (1)
- Respuesta InercialDocumento8 páginasRespuesta InercialAld Miguel OAún no hay calificaciones
- Estabilidad Transitoria Con DigsilentDocumento23 páginasEstabilidad Transitoria Con DigsilentRenzo Garcia CanalesAún no hay calificaciones
- Regulacion Primaria de Frecuencia ChileDocumento22 páginasRegulacion Primaria de Frecuencia ChileRonald_J._chipanaAún no hay calificaciones
- Estabilidad MultimaquinasDocumento24 páginasEstabilidad MultimaquinasSergio Arturo Salazar OlivaAún no hay calificaciones
- Frecuencia - Frente - A - Variaciones de PotenciaDocumento7 páginasFrecuencia - Frente - A - Variaciones de PotenciaRolando ChangoAún no hay calificaciones
- Sub. Electricas Tema 1Documento36 páginasSub. Electricas Tema 1koppelAún no hay calificaciones
- Análisis de Estabilidad TransitoriaDocumento11 páginasAnálisis de Estabilidad TransitoriaChristian RuedaAún no hay calificaciones
- Parámetros Máquina SincrónicaDocumento17 páginasParámetros Máquina SincrónicaAlex SantanderAún no hay calificaciones
- Maquina SincronaDocumento24 páginasMaquina SincronaIsaiasMartinez100% (1)
- Taller en Grupo - IshikawaDocumento1 páginaTaller en Grupo - IshikawaJesús MorenoAún no hay calificaciones
- Tipos Generadores SincronosDocumento7 páginasTipos Generadores SincronosclementegarciaAún no hay calificaciones
- Problemas-EDOL Segundo OrdenDocumento19 páginasProblemas-EDOL Segundo OrdenDiego AndresAún no hay calificaciones
- Arranque de Motor DC 2018Documento40 páginasArranque de Motor DC 2018Daniel Salazar CalcinaAún no hay calificaciones
- Actuadores EléctricosDocumento9 páginasActuadores EléctricosBriannda MoralessAún no hay calificaciones
- Inversor Con Modulacion PWMDocumento4 páginasInversor Con Modulacion PWMKimy Pamela VillalbaAún no hay calificaciones
- Estabilidad Angular - Herrera KleverDocumento21 páginasEstabilidad Angular - Herrera KleverJoha HerreraAún no hay calificaciones
- Maquina SincronaDocumento44 páginasMaquina SincronaJulio Fabricio Pino BustamanteAún no hay calificaciones
- Ejercicio de Sistemas Eléctricos de PotenciaDocumento15 páginasEjercicio de Sistemas Eléctricos de PotenciadmdgvoAún no hay calificaciones
- Arranque de Motores Asincronos TrifasicosDocumento16 páginasArranque de Motores Asincronos Trifasicostestem156845Aún no hay calificaciones
- Introducción Al Sistema Quanser & Motor DCDocumento6 páginasIntroducción Al Sistema Quanser & Motor DCJuan JuradöAún no hay calificaciones
- Capitulo 4Documento53 páginasCapitulo 4Victor MacedoAún no hay calificaciones
- Trabajo ValuacionDocumento5 páginasTrabajo ValuacionYann Flores LopezAún no hay calificaciones
- Conga PDFDocumento19 páginasConga PDFcynthiaAún no hay calificaciones
- Memoria 1Documento47 páginasMemoria 1mjerssonAún no hay calificaciones
- Dimensionamiento de Una Nave Industrial TESISDocumento298 páginasDimensionamiento de Una Nave Industrial TESISJorge SanchezAún no hay calificaciones
- Foto Me TriaDocumento186 páginasFoto Me TriaAnderson OsorioAún no hay calificaciones
- Workbook 3 Respuestas World LinkDocumento8 páginasWorkbook 3 Respuestas World LinkPab Mori58% (12)
- Ate RomasDocumento3 páginasAte RomasJohn CarmonaAún no hay calificaciones
- Seleccion de Lamparas y Luminarias - Un Problema MulticriterioDocumento5 páginasSeleccion de Lamparas y Luminarias - Un Problema MulticriterioDiego UmañaAún no hay calificaciones
- JaraDocumento1 páginaJaraJohn CarmonaAún no hay calificaciones
- Presentacintentativa4270709final 120513173347 Phpapp02Documento40 páginasPresentacintentativa4270709final 120513173347 Phpapp02John CarmonaAún no hay calificaciones
- 1 UniddsDocumento4 páginas1 UniddsJohn CarmonaAún no hay calificaciones
- Cuarta Revolucion Industrial-Cconislla Carmona John-Xme 1Documento4 páginasCuarta Revolucion Industrial-Cconislla Carmona John-Xme 1John CarmonaAún no hay calificaciones
- Conceptos y UnidadesDocumento6 páginasConceptos y UnidadesNery JulioAún no hay calificaciones
- Transform AdoresDocumento49 páginasTransform AdoresJohn CarmonaAún no hay calificaciones
- Transform AdoresDocumento49 páginasTransform AdoresJohn CarmonaAún no hay calificaciones
- Conceptos y UnidadesDocumento6 páginasConceptos y UnidadesNery JulioAún no hay calificaciones
- Tesis de Grado de Puente Peatonal de MaderaDocumento198 páginasTesis de Grado de Puente Peatonal de Maderaamadoroman33% (3)
- Causas de Problemas y Fallas en Transformadores de Potencia y Acciones PreventivasDocumento1 páginaCausas de Problemas y Fallas en Transformadores de Potencia y Acciones PreventivasJohn CarmonaAún no hay calificaciones
- Derecho de La AlimentacionDocumento1 páginaDerecho de La AlimentacionJohn CarmonaAún no hay calificaciones
- Luminotecnia PDFDocumento10 páginasLuminotecnia PDFimherbyAún no hay calificaciones
- Dibujo La BulimiaDocumento1 páginaDibujo La BulimiaJohn CarmonaAún no hay calificaciones
- Francisco 1Documento9 páginasFrancisco 1John CarmonaAún no hay calificaciones
- Causas de Problemas y Fallas en Transformadores de Potencia y Acciones PreventivasDocumento1 páginaCausas de Problemas y Fallas en Transformadores de Potencia y Acciones PreventivasJohn CarmonaAún no hay calificaciones
- Cuál Es Su Origen La AnorexiaDocumento1 páginaCuál Es Su Origen La AnorexiaJohn CarmonaAún no hay calificaciones
- Balotario 4 Avance 1Documento1 páginaBalotario 4 Avance 1John CarmonaAún no hay calificaciones
- Señales ProhivitivasDocumento1 páginaSeñales ProhivitivasJohn CarmonaAún no hay calificaciones
- Diseño de FajaDocumento35 páginasDiseño de FajaJohn CarmonaAún no hay calificaciones
- Expo 3Documento56 páginasExpo 3John CarmonaAún no hay calificaciones
- Calclulo de La Malla de Puesta A Tierra de Una SubestaciónDocumento6 páginasCalclulo de La Malla de Puesta A Tierra de Una SubestaciónHUgo TovarAún no hay calificaciones
- Hoja de Problemas #6MDocumento4 páginasHoja de Problemas #6MJohn CarmonaAún no hay calificaciones
- AnaximandroDocumento10 páginasAnaximandroyanceliangel1994Aún no hay calificaciones
- Curriculum Vitae de AlejoDocumento3 páginasCurriculum Vitae de AlejoaaaAún no hay calificaciones
- Cómo Hacer Crayones CaserosDocumento1 páginaCómo Hacer Crayones Caseroscityhunter101677Aún no hay calificaciones
- Polimeros 1Documento48 páginasPolimeros 1Glenda Tesen QuispeAún no hay calificaciones
- Diseño de Cobertura METÁLICADocumento25 páginasDiseño de Cobertura METÁLICAMoises RoncalAún no hay calificaciones
- Conductismo y CognitivismoDocumento17 páginasConductismo y CognitivismodagobertoAún no hay calificaciones
- Comparacion de Tipos de EngranajesDocumento3 páginasComparacion de Tipos de EngranajesEmilioEnriqueAvalosTrujilloAún no hay calificaciones
- CASO PRACTICO Proceso de Atencion Yamileth MercadoDocumento6 páginasCASO PRACTICO Proceso de Atencion Yamileth MercadoBetty MirandaAún no hay calificaciones
- Grados de Viscosidad Sae para MotoresDocumento10 páginasGrados de Viscosidad Sae para MotoresDaniel Tenezaca BejaranoAún no hay calificaciones
- Tesis Doctoral Valoracion de La Satisfaccion, El Desempeño y La Imagen Del Destino Por Los Guias de TurismoDocumento255 páginasTesis Doctoral Valoracion de La Satisfaccion, El Desempeño y La Imagen Del Destino Por Los Guias de TurismomidumeAún no hay calificaciones
- Cuadro Sinoptico Descripcion de CargosDocumento1 páginaCuadro Sinoptico Descripcion de Cargoseiling67% (6)
- Mapeo de ProcesosDocumento60 páginasMapeo de ProcesosJesusGSASG100% (2)
- AP07-EV04 - Taller Sobre Preposiciones y Vocabulario Exhibición ComercialDocumento6 páginasAP07-EV04 - Taller Sobre Preposiciones y Vocabulario Exhibición ComercialTawanda PetersonAún no hay calificaciones
- Informe de RiesgoDocumento10 páginasInforme de RiesgoJose GregorioAún no hay calificaciones
- Teoría Del Productor MarketingDocumento3 páginasTeoría Del Productor MarketingjeisoncamargoAún no hay calificaciones
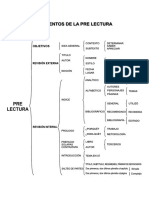
- Elementos de La Pre LecturaDocumento1 páginaElementos de La Pre LecturaFernando YzfAún no hay calificaciones
- Frederick W Act 4Documento8 páginasFrederick W Act 4alex rochaAún no hay calificaciones
- Pigars - FerreñafeDocumento42 páginasPigars - Ferreñafejeancarlosguevara100% (3)
- Edpb U1 A1 CecaDocumento7 páginasEdpb U1 A1 CecaCESAR CASTLEAún no hay calificaciones
- Pre Test - TraumatologíaDocumento7 páginasPre Test - TraumatologíaDaniel ChávezAún no hay calificaciones
- Recurso de Nulidad de NotificacionDocumento7 páginasRecurso de Nulidad de NotificacionFrank CácedaAún no hay calificaciones
- DD072 Herramientas Inform Ticas de Gesti N de ProyectosDocumento4 páginasDD072 Herramientas Inform Ticas de Gesti N de Proyectosalvaro villamizarAún no hay calificaciones
- Foro TematicoDocumento5 páginasForo TematicoYIMER JESUS RAMIREZ LAURENTEAún no hay calificaciones
- FAO Nutrición y Sistemas Alimentarios Cap 1Documento25 páginasFAO Nutrición y Sistemas Alimentarios Cap 1FrancoIgnacioLópezFerradaAún no hay calificaciones
- Mantenimiento de Líneas de Transmisión de EnergíaDocumento6 páginasMantenimiento de Líneas de Transmisión de EnergíaEduardo Gamboa Marin100% (2)
- Trabajo Final de ProceDocumento66 páginasTrabajo Final de ProcenormancolindresAún no hay calificaciones
- "Renta Chingón Tu Airbnb o Uno Ajeno" - Con Estos 5 Sencillos Pasos.Documento6 páginas"Renta Chingón Tu Airbnb o Uno Ajeno" - Con Estos 5 Sencillos Pasos.Lucia del AngelAún no hay calificaciones
- Tema 3 - Características Evolutivas de Niños de 0 A 5 AñosDocumento35 páginasTema 3 - Características Evolutivas de Niños de 0 A 5 AñosElizabeth Andrea Espinoza ApazaAún no hay calificaciones
- Trastorno Del Espectro AutistaDocumento8 páginasTrastorno Del Espectro AutistaCata EtcheverryAún no hay calificaciones
- PROGRAMACION - ANUAL - 4to SecundariaDocumento5 páginasPROGRAMACION - ANUAL - 4to SecundariaJoséLuisHidalgoZambranoAún no hay calificaciones