También podría gustarte
- Codice BORBÓNICO (Facimilar) - Paso y TroncosoDocumento284 páginasCodice BORBÓNICO (Facimilar) - Paso y TroncosoDario OroAún no hay calificaciones
- Op ArtDocumento5 páginasOp ArtDavid Talabera100% (1)
- Caracteristicas TecnicasDocumento6 páginasCaracteristicas TecnicasDavid TalaberaAún no hay calificaciones
- Puma Scara Caracteristicas TecnicasDocumento4 páginasPuma Scara Caracteristicas TecnicasDavid TalaberaAún no hay calificaciones
- Diseño de ResorteDocumento5 páginasDiseño de ResorteDavid TalaberaAún no hay calificaciones
- Gestion de La CalidadDocumento9 páginasGestion de La CalidadDavid TalaberaAún no hay calificaciones
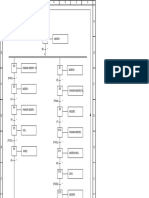
- Mezcladora de Cemento GrafcetDocumento2 páginasMezcladora de Cemento GrafcetDavid TalaberaAún no hay calificaciones
- Cuarto Eje ConclusionesDocumento3 páginasCuarto Eje ConclusionesDavid Talabera100% (1)
- Cuestionario de PLCDocumento6 páginasCuestionario de PLCBrayan Iza MHAún no hay calificaciones
- Conclusion EsDocumento1 páginaConclusion EsDavid Talabera100% (2)
- PRODUCCION DE TEXTOS - SISAT - Secundaria - DIAGNOSTICODocumento15 páginasPRODUCCION DE TEXTOS - SISAT - Secundaria - DIAGNOSTICOsantosricardorivera71Aún no hay calificaciones
- Mapa Conceptual Sobre Principales Tendencias Administrativas en El Escenario Actual de La GlobalizaciónDocumento1 páginaMapa Conceptual Sobre Principales Tendencias Administrativas en El Escenario Actual de La GlobalizaciónAndrés CárdenasAún no hay calificaciones
- MOPTLU1S3Documento4 páginasMOPTLU1S3Darwin Jantony Galvez MendozaAún no hay calificaciones
- Ensayo Mantenimiento 2do Parcial - Torres RuizDocumento4 páginasEnsayo Mantenimiento 2do Parcial - Torres RuizJimena RuizAún no hay calificaciones
- Ma444-202001-Guia Semana 2presencialDocumento3 páginasMa444-202001-Guia Semana 2presencialCESAR NAVIO PAREDESAún no hay calificaciones
- Material de Estudio Evaluación SemestralDocumento8 páginasMaterial de Estudio Evaluación SemestralKail Briceño GarcíaAún no hay calificaciones
- Administracion Codigos DeontologicosDocumento6 páginasAdministracion Codigos DeontologicosMariños YibelAún no hay calificaciones
- Un Naufrago en El Siglo XXX - Glenn ParrishDocumento121 páginasUn Naufrago en El Siglo XXX - Glenn ParrishpeterAún no hay calificaciones
- Desarrollo Organizacional, Sección IDocumento17 páginasDesarrollo Organizacional, Sección Ikaren cruzAún no hay calificaciones
- Guia Lyc - 8° BásicoDocumento6 páginasGuia Lyc - 8° BásicoarayaverdugoAún no hay calificaciones
- El SubstratoDocumento35 páginasEl SubstratoFELIX HUARANGA MORENOAún no hay calificaciones
- Texto 3. en Torno A La Noción de Contexto. ApuntesDocumento15 páginasTexto 3. en Torno A La Noción de Contexto. ApuntesYesenia Esmeralda Vazquez MendozaAún no hay calificaciones
- Formato #07-A: Registros en La Fase de EjecuciónDocumento3 páginasFormato #07-A: Registros en La Fase de EjecuciónJhossy MelendezAún no hay calificaciones
- EDA 3 FINAL SHIPIBO Ok, Ok, IV CicloDocumento60 páginasEDA 3 FINAL SHIPIBO Ok, Ok, IV Cicloeglinton pinedoAún no hay calificaciones
- La Tierra - Mapa MentalDocumento1 páginaLa Tierra - Mapa MentalMonse Valencia100% (2)
- Satelite EnvisatDocumento21 páginasSatelite EnvisatKatherine DiazAún no hay calificaciones
- Secuencia Didactica Como Hacer PanDocumento7 páginasSecuencia Didactica Como Hacer PanMiguel BuenaventuraAún no hay calificaciones
- Electromagnetismo 10Documento37 páginasElectromagnetismo 10VICTORAún no hay calificaciones
- Electricidad BásicaDocumento63 páginasElectricidad BásicaMelchor FernándezAún no hay calificaciones
- HIDROSTÁTICADocumento4 páginasHIDROSTÁTICAThe Bottle BoyAún no hay calificaciones
- Ciclo de Vida Proyecto MineroDocumento33 páginasCiclo de Vida Proyecto MineroFranco Augusto Castiglioni PlazaAún no hay calificaciones
- Informática Sebastian 102 V P3 A1Documento7 páginasInformática Sebastian 102 V P3 A1Osvaldo OlivasAún no hay calificaciones
- Labo 1 Ope 2Documento10 páginasLabo 1 Ope 2Berner Mauricio DelgadoAún no hay calificaciones
- Grupo 3 - EjerciciosDocumento11 páginasGrupo 3 - EjerciciosKatia León AlvaAún no hay calificaciones
- La Eficacia y Eficiencia OrganizacionalDocumento4 páginasLa Eficacia y Eficiencia OrganizacionalErick UribeAún no hay calificaciones
- Malla - Ing - Gestion - Expediciones - Ecoturismo - 2021 2Documento1 páginaMalla - Ing - Gestion - Expediciones - Ecoturismo - 2021 2Milo ZamoranoAún no hay calificaciones
- Actividad Sem 11 PrimeroDocumento3 páginasActividad Sem 11 PrimeroRoyerAún no hay calificaciones
- Responsabilidad Social 2do AporteDocumento15 páginasResponsabilidad Social 2do AporteGoyo Maita VillavicencioAún no hay calificaciones
- Test de Las Estrellas y Las OlasDocumento2 páginasTest de Las Estrellas y Las OlasMarco Enrique Anticona BalboaAún no hay calificaciones