También podría gustarte
- Examen ParcialDocumento5 páginasExamen ParcialJonaiker Salazar0% (2)
- Ensayo de Charpy y de DurezaDocumento24 páginasEnsayo de Charpy y de DurezaReynaldoCabezas100% (1)
- Calculo de Fusibles y GuardamotoresDocumento17 páginasCalculo de Fusibles y Guardamotoresalejandro govea martinez0% (1)
- Sensores de Velocidad y AceleraciónDocumento15 páginasSensores de Velocidad y AceleraciónKevin Batista Bejarano0% (1)
- Arranque y Paro de Un Motor Con Retención.Documento9 páginasArranque y Paro de Un Motor Con Retención.Isabela VázquezAún no hay calificaciones
- Introduccion A La Fundicion en Arena PDFDocumento30 páginasIntroduccion A La Fundicion en Arena PDFJulOr'XR100% (1)
- Fabricacion Motores ElectricosDocumento10 páginasFabricacion Motores ElectricosRoy Elvis Fernandez NeyraAún no hay calificaciones
- Caso de Estudio Analisis AceiteDocumento22 páginasCaso de Estudio Analisis AceitecuatzogAún no hay calificaciones
- TECNOLOGIA DE LAS MAQUINAS HERRAMIENTA Unidad 7Documento6 páginasTECNOLOGIA DE LAS MAQUINAS HERRAMIENTA Unidad 7Julio C. Camargo SantosAún no hay calificaciones
- Informe Final PulvimetalurgiaDocumento55 páginasInforme Final PulvimetalurgiaVJouleAún no hay calificaciones
- Lubricacion ElastohidrodinamicaDocumento8 páginasLubricacion ElastohidrodinamicaHéctor CeballosAún no hay calificaciones
- Introduccion A La OlehidraulicaDocumento14 páginasIntroduccion A La OlehidraulicaRodrigo CastellanoAún no hay calificaciones
- Partes Internas de Un TaladroDocumento2 páginasPartes Internas de Un TaladroLizbeth JimenezAún no hay calificaciones
- Tipos de Cortes en MetalesDocumento16 páginasTipos de Cortes en MetalesMagaliRamirezEsteban50% (2)
- Ud6 Metales y AleacionesDocumento60 páginasUd6 Metales y AleacionesFranTSBAún no hay calificaciones
- Soldadura Por Arco Eléctrico Con Electrodo Revestido PDFDocumento31 páginasSoldadura Por Arco Eléctrico Con Electrodo Revestido PDFAnonymous tI6cgOO7NAAún no hay calificaciones
- Aplicaciones ProcesosDocumento24 páginasAplicaciones ProcesosdennisAún no hay calificaciones
- Turbina PeltonDocumento14 páginasTurbina PeltonJimmy Joel ColqueAún no hay calificaciones
- Mantenimiento Correctivo y PreventivoDocumento2 páginasMantenimiento Correctivo y PreventivoArturo DiazAún no hay calificaciones
- Tesina Seguidor de LineaDocumento29 páginasTesina Seguidor de LineabrandonAún no hay calificaciones
- Motor de Corriente AlternaDocumento26 páginasMotor de Corriente AlternaRafa GarcíaAún no hay calificaciones
- 3.1, 3.2 Lubricantes y Su ClasificaciónDocumento25 páginas3.1, 3.2 Lubricantes y Su ClasificaciónbrandonAún no hay calificaciones
- Practica de CizalladoDocumento2 páginasPractica de CizalladoSteve Wozniak100% (1)
- Aplicaciones de Las Soldaduras A Tope y de Filete.Documento5 páginasAplicaciones de Las Soldaduras A Tope y de Filete.Iraida AlemánAún no hay calificaciones
- Producción ModeradaDocumento3 páginasProducción ModeradaMarco perezAún no hay calificaciones
- Informe (Tipos de Motores)Documento13 páginasInforme (Tipos de Motores)DarwinAún no hay calificaciones
- Soldadura Por Puntos PresentaciónDocumento34 páginasSoldadura Por Puntos PresentaciónRomano Galarza100% (1)
- Fundicion IndustrialDocumento11 páginasFundicion IndustrialpergutiAún no hay calificaciones
- Engranajes Cónicos de Dientes Rectos (Documento27 páginasEngranajes Cónicos de Dientes Rectos (dilalo9501100% (4)
- Propiedades y Aplicaciones de Las FundicionesDocumento4 páginasPropiedades y Aplicaciones de Las Fundicionesdalila8697Aún no hay calificaciones
- Compactador de LatasDocumento11 páginasCompactador de LatasEry FreireAún no hay calificaciones
- Soldabilidad de Las FundicionesDocumento5 páginasSoldabilidad de Las FundicionesJorgeTauroAún no hay calificaciones
- ENGRANEDocumento34 páginasENGRANEseariestrellaAún no hay calificaciones
- ANALISIS Velocidades de MECANISMOS Metodo Proyecciones OrtogonalesDocumento10 páginasANALISIS Velocidades de MECANISMOS Metodo Proyecciones OrtogonalesAlvaro ConchaAún no hay calificaciones
- TAREA 01 JIMENO - Alineador de PoleasDocumento15 páginasTAREA 01 JIMENO - Alineador de PoleasNeftali Emilio Chuquino SaldañaAún no hay calificaciones
- Controladores EléctricosDocumento16 páginasControladores EléctricosEl Olivo InmueblesAún no hay calificaciones
- Momentos - Ejercicios PDFDocumento4 páginasMomentos - Ejercicios PDFAndres Julian Valenzuela AponteAún no hay calificaciones
- Proceso de LaminacionDocumento9 páginasProceso de LaminacionsupersonicogtAún no hay calificaciones
- Metodos de Transferencia PDFDocumento3 páginasMetodos de Transferencia PDFAndrea PérezAún no hay calificaciones
- Fases Del Diseño Mecánico yDocumento9 páginasFases Del Diseño Mecánico yJorge VazquezAún no hay calificaciones
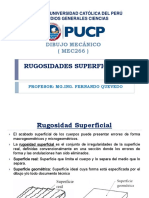
- Rugosidades Superficiales DMDocumento14 páginasRugosidades Superficiales DMsolrac4371Aún no hay calificaciones
- DISEÑO DE ÁRBOLES DE TRANSMISIÓN (Ing. Alberto Barrera M.)Documento9 páginasDISEÑO DE ÁRBOLES DE TRANSMISIÓN (Ing. Alberto Barrera M.)Ede Yosmi Grc VlAún no hay calificaciones
- La Cepilladora Maquina HerramientaDocumento30 páginasLa Cepilladora Maquina HerramientaDaniel Jesus Rondon SalazarAún no hay calificaciones
- ROSCASDocumento27 páginasROSCASJohn Acsel Galvis VelascoAún no hay calificaciones
- Características Principales de Los PLCsDocumento11 páginasCaracterísticas Principales de Los PLCsNelpz Lopez0% (1)
- Elementos de Sujeción en El TornoDocumento18 páginasElementos de Sujeción en El Tornorozure0% (1)
- Proceso de Manufactura ReductorDocumento29 páginasProceso de Manufactura ReductorEnma Benites100% (1)
- Reporte Practica TornoDocumento8 páginasReporte Practica TornoLucas Alexis Vicente PerezAún no hay calificaciones
- Barreras y Cortinas FotoeléctricasDocumento10 páginasBarreras y Cortinas FotoeléctricasRivaldo Mauricio Perez QuispeAún no hay calificaciones
- Medios Lubricos Refrigerantes para MecanizadoDocumento4 páginasMedios Lubricos Refrigerantes para MecanizadoNicolás PulidoAún no hay calificaciones
- Mecanismos ArticuladosDocumento8 páginasMecanismos ArticuladosMayelanie MendietaAún no hay calificaciones
- SprocketsDocumento18 páginasSprocketsFredi Isai Angeles MirandaAún no hay calificaciones
- Mapa Mental Sobre Actuadores NeumáticosDocumento1 páginaMapa Mental Sobre Actuadores NeumáticosJoan SmithAún no hay calificaciones
- Forjado y Templado de Un CincelDocumento11 páginasForjado y Templado de Un CincelFrancisco Vargas Glez100% (2)
- SISTEMA de Lubricación CentralizadaDocumento5 páginasSISTEMA de Lubricación CentralizadaGeovanny Contreras CasadoAún no hay calificaciones
- ENVEJECIMIENTODocumento21 páginasENVEJECIMIENTOClaudia DávilaAún no hay calificaciones
- Sistemas de Transmisión MecánicaDocumento27 páginasSistemas de Transmisión MecánicaEduardo Alex Eugenio MendezAún no hay calificaciones
- Motor de Inducción de Jaula de ArdillaDocumento8 páginasMotor de Inducción de Jaula de ArdillaIsaac HernandezAún no hay calificaciones
- Sistemas de Aire AcondicionadoDocumento52 páginasSistemas de Aire AcondicionadoCarlos AguilarAún no hay calificaciones
- Accionamientos ElectricosDocumento6 páginasAccionamientos Electricospetete100% (3)
- Preparatorio 6 ConverDocumento4 páginasPreparatorio 6 ConverAlex GomezAún no hay calificaciones
- Trabajo Mecatronica.1Documento5 páginasTrabajo Mecatronica.1Seba MartinezAún no hay calificaciones
- Apunte ProbabilidadDocumento11 páginasApunte ProbabilidadSeba MartinezAún no hay calificaciones
- Apunte ProbabilidadDocumento11 páginasApunte ProbabilidadSeba MartinezAún no hay calificaciones
- Combinacion LinealDocumento3 páginasCombinacion LinealSeba MartinezAún no hay calificaciones
- Cinemática Del Movimiento RelativoDocumento30 páginasCinemática Del Movimiento RelativoSeba MartinezAún no hay calificaciones
- Instructivo para Elaborar Informe de TP en LaboratorioDocumento2 páginasInstructivo para Elaborar Informe de TP en LaboratorioSeba MartinezAún no hay calificaciones
- Articulo Polimeros Conductores 2084Documento15 páginasArticulo Polimeros Conductores 2084Seba MartinezAún no hay calificaciones
- Bioquímica I - Sem-03 - Sesion-05 - 2023-2Documento49 páginasBioquímica I - Sem-03 - Sesion-05 - 2023-2Juan AntonioAún no hay calificaciones
- DentologiaDocumento15 páginasDentologiaana curo romeroAún no hay calificaciones
- Antropología Rural Argentina Tomo II - Ratier - Juan PDFDocumento290 páginasAntropología Rural Argentina Tomo II - Ratier - Juan PDFJuan Patricio Addesso100% (1)
- Flekke Estructura Divan Con 2 Cajones BlancoDocumento48 páginasFlekke Estructura Divan Con 2 Cajones Blancosickosmash19Aún no hay calificaciones
- Enfermedades Infecciosas Con Repercusión NeonatalDocumento3 páginasEnfermedades Infecciosas Con Repercusión Neonataljesus aguirreAún no hay calificaciones
- OA14. Completar y Escribir, de Acuerdo A Un Modelo y Con Apoyo de Lenguaje Visual, Textos No LiterariosDocumento5 páginasOA14. Completar y Escribir, de Acuerdo A Un Modelo y Con Apoyo de Lenguaje Visual, Textos No LiterariosKatherine LeeAún no hay calificaciones
- Accesorios HidraulicosDocumento19 páginasAccesorios Hidraulicosjjaimellara4443Aún no hay calificaciones
- 2018-1 Guia1. Manejo de Instrumentos de MediciónDocumento3 páginas2018-1 Guia1. Manejo de Instrumentos de MediciónMiguel Angel Muñoz NopeAún no hay calificaciones
- Micro Currículo Legislación SSTDocumento3 páginasMicro Currículo Legislación SSTPaola RamosAún no hay calificaciones
- Clase - Metabolismo Fructosa, Etanol, Galactosa USSDocumento6 páginasClase - Metabolismo Fructosa, Etanol, Galactosa USSLohengrinAún no hay calificaciones
- Yo Composto en Casa, en La Escuela y en Mi ComunidadDocumento2 páginasYo Composto en Casa, en La Escuela y en Mi ComunidadPalestrante Maria Dolores Fortes AlvesAún no hay calificaciones
- l6 SiiDocumento2 páginasl6 SiiAlvaro Gonzalo Flores GuiñezAún no hay calificaciones
- Ficha de Notificacion SisvesoDocumento2 páginasFicha de Notificacion SisvesoJohanna VargasAún no hay calificaciones
- HOJA DE VISA TIVISAY Nueva PDFDocumento3 páginasHOJA DE VISA TIVISAY Nueva PDFtivisayAún no hay calificaciones
- RAZONA MIENTOS-resuelto UNAHUR COMPLETO 2021Documento9 páginasRAZONA MIENTOS-resuelto UNAHUR COMPLETO 2021Silvina YanezAún no hay calificaciones
- Tap - Ullpuy Cereales AndinosDocumento87 páginasTap - Ullpuy Cereales AndinosJulio Fernandez IparraguirreAún no hay calificaciones
- Revisar Entrega de Examen - Semana 6 - Sumativa 2 - DISPDocumento8 páginasRevisar Entrega de Examen - Semana 6 - Sumativa 2 - DISPecornejokAún no hay calificaciones
- Informe de Laboratorio Nº4 Leyes de Newton. Maquinas Simples y Desplazamientos Sobre Un PlanoDocumento13 páginasInforme de Laboratorio Nº4 Leyes de Newton. Maquinas Simples y Desplazamientos Sobre Un Planojavier19alejandroAún no hay calificaciones
- Examen - (AAB01) Cuestionario 3 - Desarrolle La Tercera Evaluación Parcial de La Unidad 3 - Proyectos de Intervención en El Área de La SaludDocumento3 páginasExamen - (AAB01) Cuestionario 3 - Desarrolle La Tercera Evaluación Parcial de La Unidad 3 - Proyectos de Intervención en El Área de La SaludNaomi Flores100% (2)
- Unidad I Programacion Computacional IVDocumento71 páginasUnidad I Programacion Computacional IVEmerson Humberto Lopez CruzAún no hay calificaciones
- PINEARQ Diseño Habitaciones HospitalariasDocumento4 páginasPINEARQ Diseño Habitaciones HospitalariasLuis Eduardo Mata VillalbaAún no hay calificaciones
- Guia 5Documento4 páginasGuia 5Erika LozadaAún no hay calificaciones
- COMUNICACIÓN ExamenDocumento3 páginasCOMUNICACIÓN ExamenDidi Dominguez QuispeAún no hay calificaciones
- Cuestionatrio - Robotica Industrial - 08jun2020Documento5 páginasCuestionatrio - Robotica Industrial - 08jun2020Wellintong Orlando SalanAún no hay calificaciones
- Estructuray Mantenimiento GuitarraDocumento16 páginasEstructuray Mantenimiento GuitarraRafaelAún no hay calificaciones
- Actividades Extraescolares - B1 Inglés PDFDocumento2 páginasActividades Extraescolares - B1 Inglés PDFNatalia Sánchez MorenoAún no hay calificaciones
- Actividad 2 2°m Física MovimientoDocumento3 páginasActividad 2 2°m Física MovimientoFernanda MontoyaAún no hay calificaciones
- Ensayo de La Pelicula de Ana FrankDocumento4 páginasEnsayo de La Pelicula de Ana Frankalejandra rosalesAún no hay calificaciones
- Hoja de Actividades de 2º ESO (Pendientes 1 NDocumento3 páginasHoja de Actividades de 2º ESO (Pendientes 1 NJuanjo100% (1)