También podría gustarte
- El Último SamuraiDocumento3 páginasEl Último Samuraihispano1200Aún no hay calificaciones
- Trabajo Aplicado Marca Chevrolet (Final)Documento28 páginasTrabajo Aplicado Marca Chevrolet (Final)Renato AncajimaAún no hay calificaciones
- Tlaxacalancingo Oliveira 2Documento57 páginasTlaxacalancingo Oliveira 2Angelica CorreaAún no hay calificaciones
- El Código Civil Del Perú 1852-1936 Y 1984Documento19 páginasEl Código Civil Del Perú 1852-1936 Y 1984Giomar Velásquez100% (3)
- Rolling Stones4Documento4 páginasRolling Stones4hispano1200Aún no hay calificaciones
- Rolling Stones1Documento1 páginaRolling Stones1hispano1200Aún no hay calificaciones
- POTENCIA de Un PuntoDocumento1 páginaPOTENCIA de Un Puntohispano1200Aún no hay calificaciones
- Manual FotografíaDocumento184 páginasManual Fotografíahispano1200Aún no hay calificaciones
- Integrales DefinidasDocumento5 páginasIntegrales Definidashispano1200Aún no hay calificaciones
- Rolling Stones3Documento3 páginasRolling Stones3hispano1200Aún no hay calificaciones
- Rolling Stones2Documento3 páginasRolling Stones2hispano1200Aún no hay calificaciones
- Dioses NordicosDocumento13 páginasDioses Nordicoshispano1200Aún no hay calificaciones
- CatolicismoDocumento5 páginasCatolicismohispano1200Aún no hay calificaciones
- Caracteristicas Del CatolicismoDocumento5 páginasCaracteristicas Del Catolicismohispano1200Aún no hay calificaciones
- Mandamientos Del CatolicismoDocumento7 páginasMandamientos Del Catolicismohispano1200Aún no hay calificaciones
- Catolicismo en Distintas EdadesDocumento5 páginasCatolicismo en Distintas Edadeshispano1200Aún no hay calificaciones
- Congragaciones Del CatolicismoDocumento11 páginasCongragaciones Del Catolicismohispano1200Aún no hay calificaciones
- Origenes IslamDocumento9 páginasOrigenes Islamhispano1200Aún no hay calificaciones
- RobleDocumento2 páginasRoblehispano1200Aún no hay calificaciones
- Movimientos IslamistasDocumento7 páginasMovimientos Islamistashispano1200Aún no hay calificaciones
- Visual BasicDocumento7 páginasVisual Basichispano1200Aún no hay calificaciones
- Fases de LunaDocumento4 páginasFases de Lunahispano1200Aún no hay calificaciones
- San FerminesDocumento16 páginasSan Fermineshispano1200Aún no hay calificaciones
- IslamDocumento5 páginasIslamhispano1200Aún no hay calificaciones
- Teclas Rápidas InventorDocumento6 páginasTeclas Rápidas Inventorhispano1200Aún no hay calificaciones
- Nuevo Documento de Microsoft WordDocumento1 páginaNuevo Documento de Microsoft Wordhispano1200Aún no hay calificaciones
- StargateDocumento5 páginasStargatehispano1200Aún no hay calificaciones
- Teoria de La Generacion EspontaneaDocumento2 páginasTeoria de La Generacion Espontaneahispano1200Aún no hay calificaciones
- Tecnologia LedDocumento3 páginasTecnologia Ledhispano1200Aún no hay calificaciones
- Manual-Moldes SW 2016Documento10 páginasManual-Moldes SW 2016hispano1200Aún no hay calificaciones
- Universo - CosmosDocumento16 páginasUniverso - Cosmoshispano1200Aún no hay calificaciones
- Pierre y Madame CurriDocumento7 páginasPierre y Madame Currihispano12000% (1)
- Reich AlemanDocumento1 páginaReich Alemanhispano1200Aún no hay calificaciones
- Ciencia y Tecnologia 21-09-21Documento6 páginasCiencia y Tecnologia 21-09-21Rosa NuriaAún no hay calificaciones
- Teorias Del AprendizajeDocumento4 páginasTeorias Del AprendizajeDaniel David Pineda GomezAún no hay calificaciones
- Natal Care BX c-2Documento2 páginasNatal Care BX c-2Chris AliAún no hay calificaciones
- DEGIRO Broker Guía Completa Paso A PasoDocumento13 páginasDEGIRO Broker Guía Completa Paso A PasoJosAún no hay calificaciones
- Estructura de Un Canal de Televisión (TELEVISIÓN)Documento3 páginasEstructura de Un Canal de Televisión (TELEVISIÓN)OsmaryAún no hay calificaciones
- Manual Ps3Documento22 páginasManual Ps3Ricardo HerediaAún no hay calificaciones
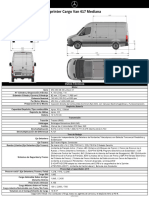
- Sprinter CargoVan 417 Mediana - 90764313-MXFDocumento1 páginaSprinter CargoVan 417 Mediana - 90764313-MXFManuel SalinasAún no hay calificaciones
- 04-Unidad 03 - Ejercicio de Reforzamiento - Conocimiento y Sus TiposDocumento8 páginas04-Unidad 03 - Ejercicio de Reforzamiento - Conocimiento y Sus TiposJavier UcañanAún no hay calificaciones
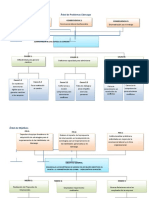
- Árbol de Problemas Liderazgo Johny FonsecaDocumento6 páginasÁrbol de Problemas Liderazgo Johny Fonsecajohny jamer fonsecamontesAún no hay calificaciones
- Tema - Seccionado - CortesDocumento15 páginasTema - Seccionado - CortesFabrizio DuárezAún no hay calificaciones
- En LingüísticaDocumento5 páginasEn Lingüísticaandeas18d0% (2)
- Proceso Desfibrado en La Producción de Tableros de Densidad MediaDocumento54 páginasProceso Desfibrado en La Producción de Tableros de Densidad MediaLuis Omar Aguila Valenzuela50% (2)
- Historia Del CineDocumento60 páginasHistoria Del CineLorenzo Vallejo MárquezAún no hay calificaciones
- Charla 5 Min - Una Buena IluminaciónDocumento2 páginasCharla 5 Min - Una Buena IluminaciónJose LoyolaAún no hay calificaciones
- Desarrollo de La Química Analítica en Función Del TiempoDocumento5 páginasDesarrollo de La Química Analítica en Función Del Tiempokaren mestraAún no hay calificaciones
- Calibrador de LainasDocumento2 páginasCalibrador de Lainasjavier alvarezAún no hay calificaciones
- Actividad 6 - Psicología de La EducaciónDocumento4 páginasActividad 6 - Psicología de La Educaciónmaria legorburuAún no hay calificaciones
- Taller 2 PDFDocumento9 páginasTaller 2 PDFCarlos Daniel Raigoso TrianaAún no hay calificaciones
- El Pato SalvajeDocumento2 páginasEl Pato SalvajeB'reshith BurstensAún no hay calificaciones
- Factura Transporte Comercial Excepto TaxiDocumento1 páginaFactura Transporte Comercial Excepto TaxiJhonatan GrAún no hay calificaciones
- 08 - Gruner El Otro en Las Ciencias SocialesDocumento6 páginas08 - Gruner El Otro en Las Ciencias SocialesValeriaDalMolinAún no hay calificaciones
- Cuadro Sinoptico - NIA 210 y 240Documento11 páginasCuadro Sinoptico - NIA 210 y 240YENGLY MARILU GONZALEZ VELASQUEZAún no hay calificaciones
- Ejercicios de Writer Avanzado 1Documento3 páginasEjercicios de Writer Avanzado 1silgarsepAún no hay calificaciones
- TeatroDocumento10 páginasTeatrovityaAún no hay calificaciones
- Informe RISKO SAS - Aval Bimensual de La Torre Grúa POTAIN MC 85 Enero 2020Documento8 páginasInforme RISKO SAS - Aval Bimensual de La Torre Grúa POTAIN MC 85 Enero 2020alejandraheventAún no hay calificaciones
- Catalogo Cali 2021 - 2022Documento26 páginasCatalogo Cali 2021 - 2022Felix Villagra NogalesAún no hay calificaciones
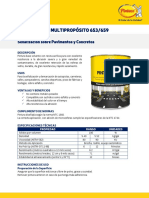
- Pintutrafico Multiproposito 653 659Documento3 páginasPintutrafico Multiproposito 653 659Practicantes SSTAún no hay calificaciones