También podría gustarte
- Diseño Del Movimiento Del Robot SoldadorDocumento4 páginasDiseño Del Movimiento Del Robot SoldadorfriedforeverAún no hay calificaciones
- Prueba Resistencia Ohmica PDFDocumento15 páginasPrueba Resistencia Ohmica PDFJuan David Garcia VelazquezAún no hay calificaciones
- Informe Brazo RoboticoDocumento8 páginasInforme Brazo RoboticoChichOo GonzazlxAún no hay calificaciones
- Control y Protección de Motores Eléctricos-4Documento44 páginasControl y Protección de Motores Eléctricos-4Alonso Monja EspinozaAún no hay calificaciones
- Manual de Programacion (Fundamentos) PDFDocumento562 páginasManual de Programacion (Fundamentos) PDFJesus MedinaAún no hay calificaciones
- Fundamentos de Robótica 2da Edicion Antonio Barrientos, Luis Felipe Peñin, Carlos Balaguer PDFDocumento315 páginasFundamentos de Robótica 2da Edicion Antonio Barrientos, Luis Felipe Peñin, Carlos Balaguer PDFVictor Manuel RuizAún no hay calificaciones
- UR5 User Manual Es GlobalDocumento189 páginasUR5 User Manual Es GlobalCar GuerraAún no hay calificaciones
- Topicos Avanzados de AutomatizacionDocumento9 páginasTopicos Avanzados de AutomatizacionAnonymous bqJDeCNIAún no hay calificaciones
- News Eplan v21 Sp1 Es EsDocumento58 páginasNews Eplan v21 Sp1 Es EsEdgar José Sánchez AngelesAún no hay calificaciones
- Articulo 15 de La RETIEDocumento50 páginasArticulo 15 de La RETIEKarlos EsmuzAún no hay calificaciones
- 13 07 19 Sold Robotizada JRMDocumento38 páginas13 07 19 Sold Robotizada JRMGrover AduviriAún no hay calificaciones
- Abc Motores EléctricosDocumento1 páginaAbc Motores EléctricosramivelizAún no hay calificaciones
- Copia de Manual Modem Huawei B260a PDFDocumento32 páginasCopia de Manual Modem Huawei B260a PDFLGMR3188% (8)
- Examen RoboticaDocumento2 páginasExamen RoboticaEdison MalacaraAún no hay calificaciones
- ElectroneumaticaDocumento5 páginasElectroneumaticaLuis Miguel BarrenoAún no hay calificaciones
- Oliver BatlleDocumento28 páginasOliver Batlleirojoshi100% (1)
- User Guide ETS-1000L (Spanish) 1058624Documento45 páginasUser Guide ETS-1000L (Spanish) 1058624Gilberto Rivera50% (2)
- Sistemas Electronicos para Control de MotoresDocumento3 páginasSistemas Electronicos para Control de MotoresJulioAún no hay calificaciones
- INS ElectricaDocumento33 páginasINS ElectricaCristina García0% (1)
- Catalogo Ge LamparasDocumento56 páginasCatalogo Ge LamparasstephanirangelsAún no hay calificaciones
- Optimización máquina etiquetadoraDocumento54 páginasOptimización máquina etiquetadoraSantiago AvilaAún no hay calificaciones
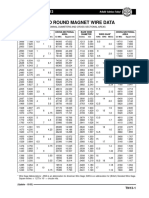
- Datos de Alambre MagnetoDocumento2 páginasDatos de Alambre Magnetoedwinsazzz100% (1)
- Instrucciones Operacion r41 EsDocumento219 páginasInstrucciones Operacion r41 EsiagomouAún no hay calificaciones
- Reglamento Tipo 2Documento92 páginasReglamento Tipo 2Manuel Martínez EscobarAún no hay calificaciones
- Configurar Grafcet SiemensDocumento46 páginasConfigurar Grafcet SiemensAlí Quiroz BrunoAún no hay calificaciones
- Presentación Herramienta Drv3 LiteDocumento14 páginasPresentación Herramienta Drv3 LiteJAIRO ALONSO CRISTANCHO WEB 2.OAún no hay calificaciones
- Examen de Mecatronica de La Segunda Unidad (Garcia Asmad Jhonn)Documento11 páginasExamen de Mecatronica de La Segunda Unidad (Garcia Asmad Jhonn)Garcia Asmad JhonnAún no hay calificaciones
- Tipos de Mantenimiento IndustrialDocumento2 páginasTipos de Mantenimiento IndustrialLibreria Orellana100% (1)
- Practica Arrancador para Motor ElectricoDocumento4 páginasPractica Arrancador para Motor Electricodaniel_pulido_63Aún no hay calificaciones
- Fisica Aplicada PDFDocumento3 páginasFisica Aplicada PDFMaximiliano Boschi100% (1)
- Unidad 1 CNCDocumento18 páginasUnidad 1 CNCgabriel sauza100% (1)
- 3.2 Resistibilidad y Resistencia ReporteDocumento10 páginas3.2 Resistibilidad y Resistencia ReporteItzel Sarai Lázaro CerinoAún no hay calificaciones
- Diseño y Construcción de Un Sistema de Refrigeracion de Conservacion para LaboratorioDocumento178 páginasDiseño y Construcción de Un Sistema de Refrigeracion de Conservacion para LaboratorioHernan GarciaAún no hay calificaciones
- Apunte Instr - Med.mag - Electr.Documento22 páginasApunte Instr - Med.mag - Electr.Alez89Aún no hay calificaciones
- Brazo Robótico SoldadorDocumento9 páginasBrazo Robótico SoldadorCyannLu100% (1)
- Tipos y Caracteristicas de TransformadoresDocumento40 páginasTipos y Caracteristicas de Transformadoresjony herreraAún no hay calificaciones
- Sistema automatizado de pinturaDocumento213 páginasSistema automatizado de pinturaenfrecuencia100% (1)
- III EKIN OPCI-01 Guias OperCircuitsElectronDigitDocumento61 páginasIII EKIN OPCI-01 Guias OperCircuitsElectronDigithematomaAún no hay calificaciones
- Medicion e InstrumentacionDocumento4 páginasMedicion e InstrumentacionAlexander BaldecAún no hay calificaciones
- Control AutomáticoDocumento20 páginasControl AutomáticoJulio Cesar Ordoñez TrujilloAún no hay calificaciones
- Brazo Robotico Soldadura GmawDocumento76 páginasBrazo Robotico Soldadura GmawMario SandovalAún no hay calificaciones
- Tabla de KVA (Electrcidad)Documento10 páginasTabla de KVA (Electrcidad)dan2616Aún no hay calificaciones
- Codigo Electrico Ecuatoriano PDFDocumento379 páginasCodigo Electrico Ecuatoriano PDFjoeman19Aún no hay calificaciones
- Normas Internacionales para Diseño MecatrónicoDocumento13 páginasNormas Internacionales para Diseño MecatrónicoErick Mera OtoyaAún no hay calificaciones
- Fundamentos de Electricidad y MagnetismoDocumento3 páginasFundamentos de Electricidad y Magnetismowillys15Aún no hay calificaciones
- Catálogo de accesorios para lavanderíaDocumento40 páginasCatálogo de accesorios para lavanderíaJesus Roberto75% (4)
- Descriptor Sistemas de Control AutomaticoDocumento4 páginasDescriptor Sistemas de Control AutomaticoCiudad De Las CabrasAún no hay calificaciones
- Instalación eléctrica domiciliariaDocumento26 páginasInstalación eléctrica domiciliariaSergio AndradeAún no hay calificaciones
- Diplomado en Mantenimiento IndustrialDocumento5 páginasDiplomado en Mantenimiento IndustrialJuan A. BenitezAún no hay calificaciones
- Importancia de La Pruebas en TransformadoresDocumento1 páginaImportancia de La Pruebas en Transformadorespjgg26Aún no hay calificaciones
- Generación de Trayectorias en Un Sistema de Manipuladores Robóticos Múltiples: Javier Ramirez Gordillo Ipn MXDocumento305 páginasGeneración de Trayectorias en Un Sistema de Manipuladores Robóticos Múltiples: Javier Ramirez Gordillo Ipn MXJavier Ramirez GordilloAún no hay calificaciones
- Norma IEC - 154 - 165Documento12 páginasNorma IEC - 154 - 165Ivan BenitezAún no hay calificaciones
- NeumInd - Problemas de ElectroneumáticaDocumento11 páginasNeumInd - Problemas de ElectroneumáticaLuis LAún no hay calificaciones
- 26 Clases de Calculo DiferencialDocumento74 páginas26 Clases de Calculo Diferencialmemo_arangoaAún no hay calificaciones
- La Robotica 3ra GuiaDocumento11 páginasLa Robotica 3ra GuiaFelipe Ramirez CardozoAún no hay calificaciones
- Definiciones Robótica IndustrialDocumento32 páginasDefiniciones Robótica IndustrialAngelBNAún no hay calificaciones
- Tema 1.2 Estructura Mecánica de Un RobotDocumento10 páginasTema 1.2 Estructura Mecánica de Un RobotYami CortezAún no hay calificaciones
- Cap1 Introduccion Robotica IndustrialDocumento20 páginasCap1 Introduccion Robotica IndustrialMojamed Landeros100% (2)
- Concepto de RoboticaDocumento26 páginasConcepto de Roboticabomaye10% (1)
- Ay SoledadDocumento1 páginaAy SoledadEfren EspinozaAún no hay calificaciones
- Prueba Diagnóstico de Física 2012Documento1 páginaPrueba Diagnóstico de Física 2012Efren EspinozaAún no hay calificaciones
- Protocolo de Río de JaneiroDocumento1 páginaProtocolo de Río de JaneiroEfren EspinozaAún no hay calificaciones
- EsTUDIO LTE ECUADORDocumento148 páginasEsTUDIO LTE ECUADOREfren EspinozaAún no hay calificaciones
- Letras Eff en VivoDocumento3 páginasLetras Eff en VivoEfren EspinozaAún no hay calificaciones
- Biografia Musical Victor TenempaguayDocumento7 páginasBiografia Musical Victor TenempaguayEfren EspinozaAún no hay calificaciones
- Articulo TICSDocumento1 páginaArticulo TICSEfren EspinozaAún no hay calificaciones
- Canciones CUMBIAS 2019Documento5 páginasCanciones CUMBIAS 2019Efren EspinozaAún no hay calificaciones
- Lineamientos REEMPLAZO CatoDocumento1 páginaLineamientos REEMPLAZO CatoEfren EspinozaAún no hay calificaciones
- Discurso de Agradecimiento JAIMEDocumento1 páginaDiscurso de Agradecimiento JAIMEEfren EspinozaAún no hay calificaciones
- Diagnostico 2BGU FISICA 2019Documento3 páginasDiagnostico 2BGU FISICA 2019Efren EspinozaAún no hay calificaciones
- Diagnostico 2BGU FISICA 2019Documento3 páginasDiagnostico 2BGU FISICA 2019Efren EspinozaAún no hay calificaciones
- Ay SoledadDocumento1 páginaAy SoledadEfren EspinozaAún no hay calificaciones
- Protocolo de Río de JaneiroDocumento1 páginaProtocolo de Río de JaneiroEfren EspinozaAún no hay calificaciones
- Unidad 4 Emprendimiento 2019Documento1 páginaUnidad 4 Emprendimiento 2019Efren EspinozaAún no hay calificaciones
- Pei Informe Matriz Componente 1Documento6 páginasPei Informe Matriz Componente 1Efren EspinozaAún no hay calificaciones
- Brindis MadreDocumento1 páginaBrindis MadreEfren EspinozaAún no hay calificaciones
- AzoguesDocumento2 páginasAzoguesEfren EspinozaAún no hay calificaciones
- Chulla Quiteño Terciopelo NegroDocumento1 páginaChulla Quiteño Terciopelo NegroEfren Espinoza100% (1)
- Informe AnecdoticoDocumento2 páginasInforme AnecdoticoEfren EspinozaAún no hay calificaciones
- Propuesta Pedagógica de La Unidad Educativa ParticularDocumento1 páginaPropuesta Pedagógica de La Unidad Educativa ParticularEfren EspinozaAún no hay calificaciones
- PROYECTO Cato AventuraDocumento10 páginasPROYECTO Cato AventuraEfren EspinozaAún no hay calificaciones
- Discurso Dia de La MadreDocumento2 páginasDiscurso Dia de La MadreEfren EspinozaAún no hay calificaciones
- ESTATICA 1bguDocumento2 páginasESTATICA 1bguEfren EspinozaAún no hay calificaciones
- ESPINOZA Informe Proyecto Diseño IEEE PDFDocumento1 páginaESPINOZA Informe Proyecto Diseño IEEE PDFEfren EspinozaAún no hay calificaciones
- Espinoza Efren Actividad2Documento5 páginasEspinoza Efren Actividad2Efren EspinozaAún no hay calificaciones
- Articulo TICSDocumento1 páginaArticulo TICSEfren EspinozaAún no hay calificaciones
- Matemática evaluación diagnóstica triángulo rectángulo alambre sombra edificioDocumento3 páginasMatemática evaluación diagnóstica triángulo rectángulo alambre sombra edificioEfren EspinozaAún no hay calificaciones
- Lineamientos MatematicaDocumento13 páginasLineamientos Matematicapatricio_velastegu_2Aún no hay calificaciones
- SEPTIMOANIOEGBDocumento168 páginasSEPTIMOANIOEGBbagmali100% (1)
- CDM: Multiplexación por división de códigoDocumento4 páginasCDM: Multiplexación por división de códigoAlex DiazAún no hay calificaciones
- Ecuación de NernstDocumento9 páginasEcuación de NernstramixfAún no hay calificaciones
- Manual de Usuario Pucará III V3.00Documento10 páginasManual de Usuario Pucará III V3.00Gaston RodriguezAún no hay calificaciones
- Planificación Electrónica II 2021-2-DefinitivaDocumento4 páginasPlanificación Electrónica II 2021-2-DefinitivaLuis MoralesAún no hay calificaciones
- The Legend of ZeldaDocumento9 páginasThe Legend of Zeldape heAún no hay calificaciones
- Frenado de Un Motor DCDocumento14 páginasFrenado de Un Motor DCFrancisco RamirezAún no hay calificaciones
- Practica 1Documento13 páginasPractica 1Erick RodríguezAún no hay calificaciones
- Unidad 5 Motores de Inducción Monofásicos y Máquinas EspecialesDocumento18 páginasUnidad 5 Motores de Inducción Monofásicos y Máquinas Especialestony0% (1)
- Modelo de Operaciones I - Proyectos y problemasDocumento3 páginasModelo de Operaciones I - Proyectos y problemasMillanBrunettAún no hay calificaciones
- Taller de Circuitos II sobre sistemas de potencia en corriente alternaDocumento4 páginasTaller de Circuitos II sobre sistemas de potencia en corriente alternaMauro LozAún no hay calificaciones
- 05 Foundation FieldBus - 2017 - TodoDocumento238 páginas05 Foundation FieldBus - 2017 - Todojorticool100% (2)
- ELQYZCÆÉN 3 - Zngma KrcgiascDocumento32 páginasELQYZCÆÉN 3 - Zngma KrcgiascAryhadne ChimicoviackiAún no hay calificaciones
- Curso de Electrónica Básica 1Documento17 páginasCurso de Electrónica Básica 1mabbtesjo7178Aún no hay calificaciones
- DS EGC Catalogo General 2006 Record Plus FG SPAINDocumento22 páginasDS EGC Catalogo General 2006 Record Plus FG SPAINJose Pablo QuirósAún no hay calificaciones
- Modelos fabricación ArenaDocumento15 páginasModelos fabricación ArenaMiguel Angel Gutierrez GutierrezAún no hay calificaciones
- Circuitos Informe Final 4 AlvaDocumento3 páginasCircuitos Informe Final 4 AlvaBeto Guevara CastilloAún no hay calificaciones
- Inspiron One 23 2330 Aio Owner's Manual Es MXDocumento146 páginasInspiron One 23 2330 Aio Owner's Manual Es MXBen QrAún no hay calificaciones
- Serie 4 MDDDocumento3 páginasSerie 4 MDDJäViizzMaresAún no hay calificaciones
- Pruebas y características de diodos de potencia empleados en rectificadores de camionesDocumento11 páginasPruebas y características de diodos de potencia empleados en rectificadores de camionesOscar GarciaAún no hay calificaciones
- Implementación de un conversor DC/AC mediante simulación y montaje físico con transistores y amplificador operacionalDocumento7 páginasImplementación de un conversor DC/AC mediante simulación y montaje físico con transistores y amplificador operacionalDANIEL JULIAN NIVIA TORRESAún no hay calificaciones
- Pasta Ceramica Tipo MDocumento3 páginasPasta Ceramica Tipo MEsau EstebanAún no hay calificaciones
- 3.3. Sistemas de Orden SuperiorDocumento8 páginas3.3. Sistemas de Orden SuperiorYasna Suárez100% (2)
- Motoniveladora CAT 12MDocumento8 páginasMotoniveladora CAT 12MPaúl Melgarejo100% (1)
- Micro 2x16 III Flash EpromDocumento18 páginasMicro 2x16 III Flash Epromcorrecaminos69100% (2)
- Contador de EventosDocumento4 páginasContador de Eventosheider.jair0% (4)
- Esime Zacatenco Practica KDocumento3 páginasEsime Zacatenco Practica KRicardo HernandezAún no hay calificaciones
- Alternador: causas y soluciones de fallas comunesDocumento3 páginasAlternador: causas y soluciones de fallas comunesEdwin CañonAún no hay calificaciones
- TD1 TXPR U3 rv20Documento16 páginasTD1 TXPR U3 rv20Nicolas SargoAún no hay calificaciones
- Monitorizacin de Signos Vitales VetCare VETERINARIADocumento2 páginasMonitorizacin de Signos Vitales VetCare VETERINARIACarlos FlorezAún no hay calificaciones
- Apuntes Quim Gen PDFDocumento133 páginasApuntes Quim Gen PDFSeceñaÜCs'lAún no hay calificaciones