También podría gustarte
- Planeador Grado 10 MatemáticasDocumento10 páginasPlaneador Grado 10 MatemáticasGloria Patricia Zapata AlvarezAún no hay calificaciones
- Inecuaciones de Primer GradoDocumento6 páginasInecuaciones de Primer Gradomariluz villalobos gomezAún no hay calificaciones
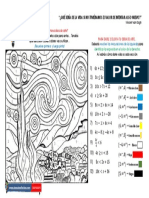
- Van Gogh Con InecuacionesDocumento1 páginaVan Gogh Con InecuacionesAdrian Campos IbañezAún no hay calificaciones
- Sistema de Ecuaciones Lineales 2x2Documento6 páginasSistema de Ecuaciones Lineales 2x2Gabriela NazateAún no hay calificaciones
- 08 Trabajo Colaborativo 2Documento18 páginas08 Trabajo Colaborativo 2D Wilson Sierra Rojas MvzAún no hay calificaciones
- Taller MatricesDocumento7 páginasTaller MatricesJulian Lopez Diaz100% (1)
- Maquina de ATWOODDocumento11 páginasMaquina de ATWOODRevollo NefiAún no hay calificaciones
- Guía de Trabajo ALGEBRA 8° - #6Documento11 páginasGuía de Trabajo ALGEBRA 8° - #6Ricardo Salamanca100% (1)
- Plano Inclinado PDFDocumento7 páginasPlano Inclinado PDFJonathan VRAún no hay calificaciones
- Guía de Sistemas de Ecuaciones 2X2 y 3X3 PDFDocumento12 páginasGuía de Sistemas de Ecuaciones 2X2 y 3X3 PDFMarcos GonzalezAún no hay calificaciones
- Practica FuncionesDocumento3 páginasPractica FuncionesAnonymous EhlFEGBAún no hay calificaciones
- Logica SimbolicaDocumento10 páginasLogica SimbolicaAlfredo LugoAún no hay calificaciones
- Nulidad Infografia para Algebra LinealDocumento2 páginasNulidad Infografia para Algebra LinealLeonardo100% (1)
- Ejercicios Grado NovenoDocumento10 páginasEjercicios Grado NovenoDeivin Mejia0% (1)
- Matriz Matematicas Grado 10 PDFDocumento4 páginasMatriz Matematicas Grado 10 PDFandres6385865Aún no hay calificaciones
- 11 Ecuaciones TrigonometricasDocumento5 páginas11 Ecuaciones TrigonometricasValeria GomezAún no hay calificaciones
- (2012) SOSA, J. C. Et Al. - Estadística Descriptiva y Probabilidades PDFDocumento522 páginas(2012) SOSA, J. C. Et Al. - Estadística Descriptiva y Probabilidades PDFSantiago PanquevaAún no hay calificaciones
- Modelo GunawardenaDocumento2 páginasModelo Gunawardenaned123Aún no hay calificaciones
- Actividad Final Teoria de NùmerosDocumento11 páginasActividad Final Teoria de NùmerosMary MontoyaAún no hay calificaciones
- Casos de Factorizacion Formula RioDocumento2 páginasCasos de Factorizacion Formula Riodevisu50% (2)
- Puntaje Típico o EstandarizadoDocumento5 páginasPuntaje Típico o EstandarizadoJuan Pablo Rivera CastroAún no hay calificaciones
- FB - Grupo 4 - Informe de Palanca de Un BrazoDocumento7 páginasFB - Grupo 4 - Informe de Palanca de Un BrazoNadia MatailoAún no hay calificaciones
- Serie Vectorial TEMA 2Documento8 páginasSerie Vectorial TEMA 2Brayan AlvarezAún no hay calificaciones
- Tarea 5 Mate EstructuradaDocumento15 páginasTarea 5 Mate EstructuradaOscarAlejandro Aules100% (1)
- EjerciciosDefinicionDerivada PDFDocumento4 páginasEjerciciosDefinicionDerivada PDFesteban ramirez rodriguezAún no hay calificaciones
- Tarea 2 - Sistemas de Ecuaciones Lineales, Rectas y Planos Grupo - 100408 - 153Documento29 páginasTarea 2 - Sistemas de Ecuaciones Lineales, Rectas y Planos Grupo - 100408 - 153mao100% (1)
- Cuadernillo de Actividades y Ejercicios-Algebra GeometricaDocumento40 páginasCuadernillo de Actividades y Ejercicios-Algebra GeometricaKaren Fuentes67% (3)
- PROYECTO 3 LimitesDocumento2 páginasPROYECTO 3 LimitesJULIAN ANDRES ESCOBARAún no hay calificaciones
- Modelo GunawardenDocumento4 páginasModelo GunawardenVíctor AlvaradoAún no hay calificaciones
- Sistemas de Ecuaciones Con Dos Incógnitas Tercer GradoDocumento2 páginasSistemas de Ecuaciones Con Dos Incógnitas Tercer GradoMicaela Zapata MataAún no hay calificaciones
- 02 Sol DeterminantesDocumento40 páginas02 Sol DeterminantesJUAN AGUSTÍN FRAILE SAN TEODOROAún no hay calificaciones
- Pilares Fundamentales para El Desarrollo Humano.Documento3 páginasPilares Fundamentales para El Desarrollo Humano.CristinaPeinadoGutiérrez0% (1)
- Est Ad Is Tic ADocumento17 páginasEst Ad Is Tic ALorena Castillo100% (1)
- Taller FuncionesDocumento6 páginasTaller FuncionesJuan MontesAún no hay calificaciones
- Tarea 1 - Método de Los Puntos Críticos o de Los Signos para Resolver DesigualdadesDocumento4 páginasTarea 1 - Método de Los Puntos Críticos o de Los Signos para Resolver DesigualdadesEduardo Reyes QuezadaAún no hay calificaciones
- Aporte de Ecuaciones Diferenciales Punto 6Documento3 páginasAporte de Ecuaciones Diferenciales Punto 6PEDRO RAMOS MACEA100% (1)
- Paso 1 - Actividad de ReconocimientoDocumento9 páginasPaso 1 - Actividad de ReconocimientoD Wilson Sierra Rojas MvzAún no hay calificaciones
- Ejercicios Lógica Formal, Inferencias, Simplificación e InfereciasDocumento6 páginasEjercicios Lógica Formal, Inferencias, Simplificación e Infereciasimurrifak0% (1)
- Humanidades y Lengua CastellanaDocumento32 páginasHumanidades y Lengua CastellanaElvin Julio Cogollo PerezAún no hay calificaciones
- Lógica Simbólica - Unidad 2Documento9 páginasLógica Simbólica - Unidad 2Paola Toro100% (1)
- Qué Son Ecuaciones TrigonométricasDocumento1 páginaQué Son Ecuaciones TrigonométricasJonathan Carbus0% (1)
- Resuelto fASE 5Documento2 páginasResuelto fASE 5Historia De Las Matematicas UnadAún no hay calificaciones
- Cuadernillo de Preguntas Saber 11 - Matemáticas. Resuelto.Documento23 páginasCuadernillo de Preguntas Saber 11 - Matemáticas. Resuelto.Losano BoyanteAún no hay calificaciones
- Lógica Matemática Paso 3Documento12 páginasLógica Matemática Paso 3nicolas ortiz galindoAún no hay calificaciones
- 10º (Guia 4) La Linea RectaDocumento8 páginas10º (Guia 4) La Linea RectaNILSON ADEMIR MOSQUERA LOZANOAún no hay calificaciones
- Boletin 3 OdsDocumento12 páginasBoletin 3 OdsLorenLafebreAún no hay calificaciones
- Taller de Potenciación 9Documento1 páginaTaller de Potenciación 9vemesa14Aún no hay calificaciones
- Tarea de Tablas de FrecuenciaDocumento5 páginasTarea de Tablas de FrecuenciaRoussAún no hay calificaciones
- Álgebra Lineal Serie Universitaria Patria - (PG 83 - 101) PDFDocumento19 páginasÁlgebra Lineal Serie Universitaria Patria - (PG 83 - 101) PDFluis eduardoAún no hay calificaciones
- AlgebraDocumento6 páginasAlgebraDIEGO FERNANDO CADENA ARANGOAún no hay calificaciones
- 1.4. Incremento de Una FuncionDocumento11 páginas1.4. Incremento de Una FuncionJose Gpe. Jimenez Garcia100% (1)
- JoseAnexo 6 - Plantilla Tarea 2Documento13 páginasJoseAnexo 6 - Plantilla Tarea 2Jose Alberto Rojas SatizabalAún no hay calificaciones
- Fase 2 Actividad Matrices y Solución de Sistemas de Ecuaciones Grupo 24Documento33 páginasFase 2 Actividad Matrices y Solución de Sistemas de Ecuaciones Grupo 24Juliana MontesAún no hay calificaciones
- Sistema de Ecuaciones LinealesDocumento8 páginasSistema de Ecuaciones LinealesRichard StallmanAún no hay calificaciones
- Sistemas de Ecuaciones LinealesDocumento13 páginasSistemas de Ecuaciones LinealesAle Belletti100% (2)
- Sistema de Ecuaciones LinealesDocumento115 páginasSistema de Ecuaciones LinealesJairo Cabrera0% (1)
- Sistema de EcuacionesDocumento7 páginasSistema de EcuacionesFideo VilledaAún no hay calificaciones
- Sistema de Ecuaciones LinealesDocumento9 páginasSistema de Ecuaciones LinealesRogelio Antonio FuentesAún no hay calificaciones
- Sistema Ecuaciones LinealesDocumento6 páginasSistema Ecuaciones Linealesnorman arielAún no hay calificaciones
- Programa2022 - Álgebra LinealDocumento3 páginasPrograma2022 - Álgebra LinealMiguel Angel Vargas ValenciaAún no hay calificaciones
- Practica N°2Documento18 páginasPractica N°2lunaAún no hay calificaciones
- Deber 3 MnumericoDocumento4 páginasDeber 3 MnumericodannyAún no hay calificaciones
- Apuntes - Sistemas de Ecuaciones Lineales PDFDocumento25 páginasApuntes - Sistemas de Ecuaciones Lineales PDFSebastianAún no hay calificaciones
- Sociales IIDocumento289 páginasSociales IIAntonio BlancoAún no hay calificaciones
- Metodo Gauss Jordan - MJDocumento5 páginasMetodo Gauss Jordan - MJMarco CorleoneAún no hay calificaciones
- Algebra Lineal Actividad Semana 02Documento7 páginasAlgebra Lineal Actividad Semana 02Lennin velazquezAún no hay calificaciones
- Ejercicio Por El Metodo de Gauss-JordanDocumento7 páginasEjercicio Por El Metodo de Gauss-JordanCarlos Daniel Aguilar PerezAún no hay calificaciones
- T3 Baiu PDFDocumento14 páginasT3 Baiu PDFIrvin BarriosAún no hay calificaciones
- Ciclo 01 Ieln Álgebra LinealDocumento7 páginasCiclo 01 Ieln Álgebra LinealRicardo asAún no hay calificaciones
- Gauss JordanDocumento46 páginasGauss JordanFernando Moya100% (4)
- Métodos Numéricos, Mat. 240BDocumento20 páginasMétodos Numéricos, Mat. 240BradutariAún no hay calificaciones
- 2 Bach C CompletoDocumento497 páginas2 Bach C CompletoTxikiAún no hay calificaciones
- Taller Sis Ecuaciones PDFDocumento132 páginasTaller Sis Ecuaciones PDFGeronimo RossiAún no hay calificaciones
- 01 Gauss JordanDocumento3 páginas01 Gauss JordanRue ChiquitaAún no hay calificaciones
- U4 - Trabajo Integrador de La UnidadDocumento19 páginasU4 - Trabajo Integrador de La UnidadFernando CuevasAún no hay calificaciones
- Ajustes MatricesDocumento12 páginasAjustes MatricesTatiana PrietoAún no hay calificaciones
- CONTEXTUALIZADO DE ALGEBRA Semestre2Documento17 páginasCONTEXTUALIZADO DE ALGEBRA Semestre2Rolando Martinez AnilloAún no hay calificaciones
- UCE - Jiménez Quevedo Jean Pierre - Resistividad Electrica - S6P2Documento7 páginasUCE - Jiménez Quevedo Jean Pierre - Resistividad Electrica - S6P2Jean Pierre JimenezAún no hay calificaciones
- Suma de Los Cuadrados de Los Primeros N Numeros Naturales PDFDocumento4 páginasSuma de Los Cuadrados de Los Primeros N Numeros Naturales PDFdas413Aún no hay calificaciones
- Eali U2 EaDocumento6 páginasEali U2 EaSaul EspinozaAún no hay calificaciones
- Semana 3Documento41 páginasSemana 3Adrian ValverdeAún no hay calificaciones
- Unidad 1 MatricesDocumento114 páginasUnidad 1 MatricesSasori0% (2)
- Taller Unidad 3 Matematicas AplicadaDocumento6 páginasTaller Unidad 3 Matematicas AplicadaGiovanny ParraAún no hay calificaciones
- 3 SEL Métodos - DirectosDocumento69 páginas3 SEL Métodos - DirectosDilan AseretoAún no hay calificaciones
- Tarea 1 - Vectores Matrices y DeterminantesDocumento29 páginasTarea 1 - Vectores Matrices y DeterminantesAna MorenoAún no hay calificaciones
- Avila Micaela NumCondicionDocumento13 páginasAvila Micaela NumCondicionximenaavila2511Aún no hay calificaciones
- Rel Aligeoi 2015 2016Documento137 páginasRel Aligeoi 2015 2016Alfonso GallegosAún no hay calificaciones
- 232 Colaborativo Final Tarea2Documento42 páginas232 Colaborativo Final Tarea2ROLAN 1025Aún no hay calificaciones