También podría gustarte
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Espectro Elastico EcuadorDocumento62 páginasEspectro Elastico EcuadorManuel Dominguez RodriguezAún no hay calificaciones
- NTP 370.255-1Documento77 páginasNTP 370.255-1Manuel100% (4)
- 12 Dinamica de Estructuras de AutosDocumento4 páginas12 Dinamica de Estructuras de AutosJorgeLeon1234Aún no hay calificaciones
- Levantamiento IeDocumento10 páginasLevantamiento IeJorgeLunaAún no hay calificaciones
- Ae2 Aps3-D Método Aps3dDocumento10 páginasAe2 Aps3-D Método Aps3dJuan NieveAún no hay calificaciones
- Análisis Pseudo TridimensionalDocumento9 páginasAnálisis Pseudo Tridimensionaldarker_oblivion7233Aún no hay calificaciones
- Sistemas Multiples de Grados de Libertad, Analisis Estructural 2Documento15 páginasSistemas Multiples de Grados de Libertad, Analisis Estructural 2Alejandro DíazAún no hay calificaciones
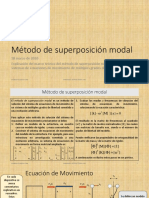
- Método de Superposición ModalDocumento37 páginasMétodo de Superposición ModalSANTIAGO TORRESAún no hay calificaciones
- Paso A Paso Del Metodo de Harly CrossDocumento9 páginasPaso A Paso Del Metodo de Harly Crossangel lozadaAún no hay calificaciones
- Revista Geotecnia Smig Numero 222Documento52 páginasRevista Geotecnia Smig Numero 222Trebor H100% (1)
- 31 - Manual de Referencia de Tarifas en IngenieríaDocumento48 páginas31 - Manual de Referencia de Tarifas en IngenieríaJuan Camilo Vasco LeivaAún no hay calificaciones
- Boletin 1Documento5 páginasBoletin 1Rodrigo Muñoz TocaleAún no hay calificaciones
- EMA - Introducción A Elementos Finitos PDFDocumento83 páginasEMA - Introducción A Elementos Finitos PDFederpuenteAún no hay calificaciones
- Analisis Matricial en Metodo Rigidez en VigasDocumento12 páginasAnalisis Matricial en Metodo Rigidez en VigasFlorcita Linda Te Amo WillAún no hay calificaciones
- DINÁMICA DE ESTRUCTURAS (91123) - Clase 1Documento33 páginasDINÁMICA DE ESTRUCTURAS (91123) - Clase 1Francisco GarcesAún no hay calificaciones
- Dos Métodos para Distribuir Las Fuerzas Horizontales A Los PorticosDocumento12 páginasDos Métodos para Distribuir Las Fuerzas Horizontales A Los PorticosraulcarooAún no hay calificaciones
- Ejercicio Columna EsbeltaDocumento23 páginasEjercicio Columna EsbeltaJoyCito PareDesAún no hay calificaciones
- MEtodo de CroosDocumento25 páginasMEtodo de CroosXtian Mendoza ChávezAún no hay calificaciones
- Método de Los Elementos FinitosDocumento22 páginasMétodo de Los Elementos FinitosLeonel Cañari GonzalesAún no hay calificaciones
- Examen Parcial 2 de Obras Hidraulicas Suncion EricsonDocumento17 páginasExamen Parcial 2 de Obras Hidraulicas Suncion EricsonEricson David Suncion ChuyesAún no hay calificaciones
- Resolución de Estructuras Hiperestáticas Con El Método de Flexibilidades PDFDocumento10 páginasResolución de Estructuras Hiperestáticas Con El Método de Flexibilidades PDFGabriel Angel Coayla VivancoAún no hay calificaciones
- Trabajo Final HuancaDocumento39 páginasTrabajo Final HuancaAntonio GAAún no hay calificaciones
- Teoria de La PlasticidadDocumento387 páginasTeoria de La PlasticidadIvan HernandezAún no hay calificaciones
- Resitencia de Materiale 2020Documento15 páginasResitencia de Materiale 2020Ivan M. GüichardoAún no hay calificaciones
- 05 y 06.PREDIMENSIONAMIENTO de Elementos EstructuralesDocumento16 páginas05 y 06.PREDIMENSIONAMIENTO de Elementos EstructuralesBetoFlorAún no hay calificaciones
- Fuerza Horizontal EquivalenteDocumento7 páginasFuerza Horizontal EquivalenteJairo Hernán Gómez RealpeAún no hay calificaciones
- Análisis PseudotridimensionalDocumento30 páginasAnálisis PseudotridimensionalMichael Barbaran LealAún no hay calificaciones
- S-5 - Metodo Pseudo TridimensionalDocumento13 páginasS-5 - Metodo Pseudo TridimensionalDamiano Ccorisoncco AlfredoAún no hay calificaciones
- Ingenieria SismoresistenteDocumento238 páginasIngenieria SismoresistenteMapache StaelAún no hay calificaciones
- Curvas de Fragilidad de Estructuras de Albañilería Confinada Empleando La Base de Registros Sísmicos Chilenos PDFDocumento106 páginasCurvas de Fragilidad de Estructuras de Albañilería Confinada Empleando La Base de Registros Sísmicos Chilenos PDFThalia PonceAún no hay calificaciones
- Análisis Pseudo-Tridimensional - Parte 12 PDFDocumento21 páginasAnálisis Pseudo-Tridimensional - Parte 12 PDFRJ GVillacortaAún no hay calificaciones
- Pavimento RigidoDocumento7 páginasPavimento RigidoJoseLuisMurciaAún no hay calificaciones
- Circulo de MohrDocumento17 páginasCirculo de MohrJoseph FerrariAún no hay calificaciones
- TI Civil AnteproyectoDocumento24 páginasTI Civil AnteproyectoRuben Dario Torres UrbanoAún no hay calificaciones
- Diseño de Zapatas CentricasDocumento9 páginasDiseño de Zapatas CentricasZenaida Toledo MarcaAún no hay calificaciones
- Analisis de Porticos Con KaniDocumento38 páginasAnalisis de Porticos Con KaniFreddyDJimenezAún no hay calificaciones
- PDF Guia 1 Ejercicios Resueltos de Aplicacion Del Principio de Los Trabajos Virtuales - CompressDocumento21 páginasPDF Guia 1 Ejercicios Resueltos de Aplicacion Del Principio de Los Trabajos Virtuales - CompressGilberto FigueiraAún no hay calificaciones
- Cap 07 IntroAnálisisMatricialFinalDocumento6 páginasCap 07 IntroAnálisisMatricialFinalPierina Cordova FloresAún no hay calificaciones
- Engenharia GeotecnicaDocumento70 páginasEngenharia GeotecnicatopografiafgAún no hay calificaciones
- Diptico Diplomado en SismoDocumento4 páginasDiptico Diplomado en Sismoaldex10Aún no hay calificaciones
- 03.3 Diseño y Cálculo EstructuralDocumento109 páginas03.3 Diseño y Cálculo EstructuralJuan Carlos DominguezAún no hay calificaciones
- Resumen Metodo de RigidezDocumento36 páginasResumen Metodo de RigidezMatias Parada Gonzalez100% (1)
- 15va Practica Analisis I Método de Cross en Vigas 2020Documento1 página15va Practica Analisis I Método de Cross en Vigas 2020MILADYAún no hay calificaciones
- Elemento Triangular de PlacaDocumento19 páginasElemento Triangular de PlacaqueteimportaAún no hay calificaciones
- 4 GeotecniaDocumento5 páginas4 GeotecniaManuel Alejandro Celeita GonzalezAún no hay calificaciones
- Diplomado - INGENIERIA Estructural Sismica y GeotecnicaDocumento6 páginasDiplomado - INGENIERIA Estructural Sismica y GeotecnicaHenry Santiago FloresAún no hay calificaciones
- Modo Fundamental de Vibración AMP, GLDocumento8 páginasModo Fundamental de Vibración AMP, GLGerar Hideto ShidoAún no hay calificaciones
- Condensacion EstaticaDocumento6 páginasCondensacion EstaticaDiomedes N TarazonaAún no hay calificaciones
- Diseño Vial 4,5,6 SemanaDocumento36 páginasDiseño Vial 4,5,6 SemanaajjasdsadAún no hay calificaciones
- Puentes - Apuntes de Clases 2006 - UNSDocumento107 páginasPuentes - Apuntes de Clases 2006 - UNSRoland Chavez RodriguezAún no hay calificaciones
- 10 Sesion - (Análisis Matricial de Vigas Usando El Método de Rigideces)Documento20 páginas10 Sesion - (Análisis Matricial de Vigas Usando El Método de Rigideces)Flavio ChauAún no hay calificaciones
- Guía Método de Rigidez Directa o Generación Directa.Documento28 páginasGuía Método de Rigidez Directa o Generación Directa.diego_cascanteAún no hay calificaciones
- Guía Método de Rigidez Matricial REV.2-1Documento29 páginasGuía Método de Rigidez Matricial REV.2-1Jose ErnestoAún no hay calificaciones
- Guía Método de Flexibilidad REV.2Documento24 páginasGuía Método de Flexibilidad REV.2Nicolás Flores JiménezAún no hay calificaciones
- Tarea 3 Analisis (Juan Carlos Escobar Sanchez)Documento22 páginasTarea 3 Analisis (Juan Carlos Escobar Sanchez)Juan Carlos Escobar SácnhezAún no hay calificaciones
- PAG 55-77 Modelo Matematico para La Estimacion de La Vida Util de Recestimineto de MolinosDocumento23 páginasPAG 55-77 Modelo Matematico para La Estimacion de La Vida Util de Recestimineto de MolinosAlex vilcaAún no hay calificaciones
- Tarea 4 - FernandoDocumento13 páginasTarea 4 - FernandoRaul Fernando Rodriguez RiveraAún no hay calificaciones
- UF1253 - Diagnóstico de deformaciones estructuralesDe EverandUF1253 - Diagnóstico de deformaciones estructuralesAún no hay calificaciones
- Geometric modeling in computer: Aided geometric designDe EverandGeometric modeling in computer: Aided geometric designAún no hay calificaciones
- El Triángulo: Nombre: FechaDocumento1 páginaEl Triángulo: Nombre: FechaAndres LopezAún no hay calificaciones
- Las Cabras TestarudasDocumento3 páginasLas Cabras TestarudasAndres Lopez0% (1)
- El Tigre y La VacaDocumento3 páginasEl Tigre y La VacaAndres LopezAún no hay calificaciones
- PATareaValidadoAS CALCULO DIFERENCIALDocumento3 páginasPATareaValidadoAS CALCULO DIFERENCIALYoel YauriAún no hay calificaciones
- 2.2.1 Hitos y Tareas PDFDocumento8 páginas2.2.1 Hitos y Tareas PDFAndres LopezAún no hay calificaciones
- Ana y Su DonDocumento4 páginasAna y Su DonAndres LopezAún no hay calificaciones
- 6 Problemas de Costo de CapitalDocumento2 páginas6 Problemas de Costo de CapitalAndres LopezAún no hay calificaciones
- Caudal EsDocumento36 páginasCaudal EsYetchan QuiveAún no hay calificaciones
- Manual Trimble Access M3Documento19 páginasManual Trimble Access M3Edison Javier Albuja ProañoAún no hay calificaciones
- Presentacion Primeros AuxiliosDocumento34 páginasPresentacion Primeros AuxiliosJohann Llanos GuillenAún no hay calificaciones
- La Medición Del Nivel Hidrostático en Depósitos AbiertosDocumento4 páginasLa Medición Del Nivel Hidrostático en Depósitos AbiertosbeymarAún no hay calificaciones
- Ejercicios OPUDocumento2 páginasEjercicios OPUDanteAún no hay calificaciones
- FichatecnicaDocumento5 páginasFichatecnicaJorge MonteroAún no hay calificaciones
- Fertilización y Nutrición Del Cultivo de Palma Aceitera 2018Documento69 páginasFertilización y Nutrición Del Cultivo de Palma Aceitera 2018Julio HerreraAún no hay calificaciones
- Manual de Instrucciones Compresor Quincy QGS Espanol Dic 2013 PDFDocumento39 páginasManual de Instrucciones Compresor Quincy QGS Espanol Dic 2013 PDFGonzalo FioriloAún no hay calificaciones
- Matriz para Identificación de PeligrosDocumento45 páginasMatriz para Identificación de PeligrosReynel Gomez MuñozAún no hay calificaciones
- Cuaderno 4 AnaliticaDocumento8 páginasCuaderno 4 AnaliticaNicole Flores GenebrozoAún no hay calificaciones
- Bomba VarioDocumento20 páginasBomba VarioAnonymous MqSPSF2GAún no hay calificaciones
- Cuestionario n1 y 2Documento4 páginasCuestionario n1 y 2YAN CARLOS SANDOVAL HUAYLINOSAún no hay calificaciones
- Proyecto Metales FinalDocumento29 páginasProyecto Metales FinalAlejandro Ernesto CoronadoAún no hay calificaciones
- 3.laboratorio Osc. AmortiguadasDocumento10 páginas3.laboratorio Osc. AmortiguadasDiego MandonAún no hay calificaciones
- Informe de Instrumentos Metereologicos..Documento19 páginasInforme de Instrumentos Metereologicos..Alex Santa Cruz VargasAún no hay calificaciones
- Unid2b-Tratamientos TérmicosDocumento52 páginasUnid2b-Tratamientos TérmicosEdward CalleAún no hay calificaciones
- Clasificacion de Sensores y ActuadoresDocumento3 páginasClasificacion de Sensores y ActuadoresLuis Ortiz0% (1)
- PNO FriabilizadorDocumento5 páginasPNO FriabilizadorDENISSE CONSTANZA PALMAS ROMEROAún no hay calificaciones
- Sanitarias 12-Is-Agua Fria A 1-50Documento1 páginaSanitarias 12-Is-Agua Fria A 1-50Jero Joseph Gonzales Cancino0% (1)
- 1 GlucidosDocumento38 páginas1 GlucidosElena Narrillos RodriguezAún no hay calificaciones
- Laboratorio Cambios Fisicos y QuimicosDocumento13 páginasLaboratorio Cambios Fisicos y QuimicosRichard Andrew Grisales CastellanosAún no hay calificaciones
- Destilacion Fraccionada Del PetroleoDocumento6 páginasDestilacion Fraccionada Del PetroleochristianAún no hay calificaciones
- Unidad 3 Propiedades de La MateriaDocumento5 páginasUnidad 3 Propiedades de La MateriaAlejandro ReynosoAún no hay calificaciones
- Serie #7. Grupo 15Documento15 páginasSerie #7. Grupo 15valenchaniqueAún no hay calificaciones
- Choques y ColisionesDocumento1 páginaChoques y ColisionesOscar Gabriel Moscol JibajaAún no hay calificaciones
- Medicion de Ruido y AireDocumento8 páginasMedicion de Ruido y AireGABRIELA CABRERA DE LOS RIOSAún no hay calificaciones
- Queso Trabajo MonografiaDocumento16 páginasQueso Trabajo MonografiaVania Caballero0% (1)
- EscabecheDocumento8 páginasEscabecheDaniel SandAún no hay calificaciones
- Pavimentos Emulsiones Asfalticas 01-ADocumento68 páginasPavimentos Emulsiones Asfalticas 01-AHenry MoraAún no hay calificaciones
- DISEÑOSEPARDocumento15 páginasDISEÑOSEPARpayasitastarAún no hay calificaciones
- Actividad 4 Semana 2 11ºDocumento3 páginasActividad 4 Semana 2 11ºDj MaflaAún no hay calificaciones