También podría gustarte
- D2 Guialabopticaondas 1 Semestre 2022Documento45 páginasD2 Guialabopticaondas 1 Semestre 2022fabiana perez moyaAún no hay calificaciones
- Estatica PUCPDocumento41 páginasEstatica PUCPCarlos Rudas RamirezAún no hay calificaciones
- Cuestionario Previo 7Documento8 páginasCuestionario Previo 7JMartin Herdez TAún no hay calificaciones
- Taller Semana 11Documento3 páginasTaller Semana 11Angelica Maria Villamil ForeroAún no hay calificaciones
- Ejercicios Complementarios MECANICA PDFDocumento18 páginasEjercicios Complementarios MECANICA PDFMi LemusAún no hay calificaciones
- Lab. Fisica I N 03Documento21 páginasLab. Fisica I N 03Samir Chayanne Contreras VenturaAún no hay calificaciones
- Fisica3 GuiasDocumento25 páginasFisica3 GuiasPaula AguilarAún no hay calificaciones
- Cuestionario e Conservacion de EnergiaDocumento7 páginasCuestionario e Conservacion de EnergiaMiguel Tasayco100% (1)
- Formato de Trabajo FinalDocumento9 páginasFormato de Trabajo FinalFrank Sarmiento OjedaAún no hay calificaciones
- Introducción A Las CienciasDocumento13 páginasIntroducción A Las Cienciasalex 177 castillaAún no hay calificaciones
- Cap 2 Dinamica de Una ParticulaDocumento24 páginasCap 2 Dinamica de Una ParticulaKATERYN LISBETH CARBAJAL PECHOAún no hay calificaciones
- Estática N°1 - VDLDocumento12 páginasEstática N°1 - VDLVíctor LealAún no hay calificaciones
- Reporte de Practica 6.1Documento8 páginasReporte de Practica 6.1DIEGO URIEL HERNANDEZ AQUINOAún no hay calificaciones
- Entregable 1Documento12 páginasEntregable 1Angel ArceAún no hay calificaciones
- Manual Estatica (1ra A 4ta Parte) PDFDocumento42 páginasManual Estatica (1ra A 4ta Parte) PDFDariem ArandaAún no hay calificaciones
- Proyecto Final Fisica y Quimica Video y El TrabajoDocumento8 páginasProyecto Final Fisica y Quimica Video y El TrabajoCorvi roly Osores vasquezAún no hay calificaciones
- Ejercicios de Mecanica IDocumento156 páginasEjercicios de Mecanica IDixon Antonio MaradiagaAún no hay calificaciones
- Practicas MecanicaDocumento17 páginasPracticas Mecanicaangelzuniga321Aún no hay calificaciones
- Guia Taller Leyes Newton2022 1Documento8 páginasGuia Taller Leyes Newton2022 1fraaanAún no hay calificaciones
- Informe Segunda Seccion Laboratorio FisicaDocumento12 páginasInforme Segunda Seccion Laboratorio FisicaJennifer Valenzuela100% (1)
- CLASE I (Introducción y Estática de Partículas) PDFDocumento22 páginasCLASE I (Introducción y Estática de Partículas) PDFFernando Chavarria67% (3)
- Practica No 3Documento16 páginasPractica No 3asdsfasfAún no hay calificaciones
- Diagnóstico Otoño 2024Documento4 páginasDiagnóstico Otoño 2024friquelme453Aún no hay calificaciones
- UNIDAD N 1 Mecanica RacionalDocumento4 páginasUNIDAD N 1 Mecanica RacionalVictoria RodriguezAún no hay calificaciones
- Trabajo EnergiaDocumento4 páginasTrabajo EnergiastrasusAún no hay calificaciones
- Avance de ProyectoDocumento6 páginasAvance de ProyectoMilagros YatoAún no hay calificaciones
- Het OnamDocumento8 páginasHet OnamJeyser Ahuanari SilvanoAún no hay calificaciones
- Fuerzas Coplanares No Conc.Documento4 páginasFuerzas Coplanares No Conc.Karla CastroAún no hay calificaciones
- Trabajo y Energia LaboratorioDocumento13 páginasTrabajo y Energia LaboratorioManuel Silva Guevara100% (2)
- FisicaDocumento6 páginasFisicaShirleAún no hay calificaciones
- Proyecto Final de OjedaaaaDocumento8 páginasProyecto Final de Ojedaaaaangel dabid ojeda buendiaAún no hay calificaciones
- Cuerpos RigidosDocumento38 páginasCuerpos RigidosEmilyMiyuJalcaVerdeAún no hay calificaciones
- 2 Metodo Directo de Matriz de RigidezDocumento18 páginas2 Metodo Directo de Matriz de RigidezRory PajueloAún no hay calificaciones
- Cartilla UNIDAD 2-Fisica 1-EjerciciosDocumento6 páginasCartilla UNIDAD 2-Fisica 1-EjerciciosGonzalo Benjamin PerezAún no hay calificaciones
- Laboratorio 5 Fisica 1 Udb UNiversidad GuiasDocumento7 páginasLaboratorio 5 Fisica 1 Udb UNiversidad GuiasEdwin Alfredo Lopez AguirreAún no hay calificaciones
- Colisiones BidimensionalesDocumento12 páginasColisiones BidimensionalesAnmiyitoAún no hay calificaciones
- 2 Capitulo 4b FinalDocumento38 páginas2 Capitulo 4b FinalKarla Enríquez100% (1)
- Fisica 1Documento32 páginasFisica 1Jazmin BravoAún no hay calificaciones
- Fuerza SDocumento19 páginasFuerza SBryan Pérez PérezAún no hay calificaciones
- Guía Noveno FisicsaDocumento162 páginasGuía Noveno FisicsaHeleen HerreraAún no hay calificaciones
- Fisica PROYECTODocumento17 páginasFisica PROYECTOJavier SayavedraAún no hay calificaciones
- Ejercicio Fisica General Unidad 2 Tarea 2Documento10 páginasEjercicio Fisica General Unidad 2 Tarea 2Edgard Alberto Ruiz MojicaAún no hay calificaciones
- Fisica InformeDocumento36 páginasFisica InformeLuis Miguel Rosas75% (4)
- Desarrollo Tarea 2 - Estudisnte # 3 Katterin Paola AlvearDocumento18 páginasDesarrollo Tarea 2 - Estudisnte # 3 Katterin Paola AlvearKATTERIN PAOLA ALVEAR MORENOAún no hay calificaciones
- Proyecto Final Del Curso Fisica y QuimicaDocumento9 páginasProyecto Final Del Curso Fisica y QuimicaJorge Llumpo acuñaAún no hay calificaciones
- Sistema Mecanico TraslacionalDocumento18 páginasSistema Mecanico Traslacionalmoiseszav21Aún no hay calificaciones
- Laboratorio 2 de Física IDocumento32 páginasLaboratorio 2 de Física IMariza Martina Camones MaguiñaAún no hay calificaciones
- Mecanica Vectorial UNIDAD 1 - Sesion 1 PDFDocumento46 páginasMecanica Vectorial UNIDAD 1 - Sesion 1 PDFWilson Javier CubaAún no hay calificaciones
- Tarbajo Final de Fisica y Quimica - Andres Cabrear CastillaDocumento13 páginasTarbajo Final de Fisica y Quimica - Andres Cabrear Castillaalex 177 castillaAún no hay calificaciones
- Muestra Clase de FísicaDocumento9 páginasMuestra Clase de FísicananitobaezAún no hay calificaciones
- Estatica Unidad1 IntroduccionDocumento165 páginasEstatica Unidad1 IntroduccionSebastian TafurAún no hay calificaciones
- Ejercicios Asignados A PAULA ALEJANDRA GALVIS BARONDocumento20 páginasEjercicios Asignados A PAULA ALEJANDRA GALVIS BARONLizeth GalvizAún no hay calificaciones
- ARMADURASDocumento9 páginasARMADURASemmanuelmorales20% (1)
- EnergiaDocumento24 páginasEnergiaJesusHuancaAún no hay calificaciones
- Guía 6 - Ley de HookeDocumento11 páginasGuía 6 - Ley de HookeFaiver RodriguezAún no hay calificaciones
- Guía para el análisis y solución de problemas de resistencia de materialesDe EverandGuía para el análisis y solución de problemas de resistencia de materialesAún no hay calificaciones
- Calculo para La IngenieriaDocumento403 páginasCalculo para La IngenieriaF.W.100% (52)
- (Lanove-CCF) Sword Art Online Volumen 01 CompletoDocumento231 páginas(Lanove-CCF) Sword Art Online Volumen 01 CompletoJesús Isay Galván RomoAún no hay calificaciones
- UPG Practica 2 Transistor Electronica Septiembre 2013Documento6 páginasUPG Practica 2 Transistor Electronica Septiembre 2013Jesús Isay Galván RomoAún no hay calificaciones
- UPG Practica 6 Convertidores Electronica Septiembre 2013Documento3 páginasUPG Practica 6 Convertidores Electronica Septiembre 2013Jesús Isay Galván RomoAún no hay calificaciones
- Calibrador Tipo VernierDocumento9 páginasCalibrador Tipo VernierJesús Isay Galván RomoAún no hay calificaciones
- Mtriz 2023 3º-5º JCHD 2024Documento6 páginasMtriz 2023 3º-5º JCHD 2024marceloarroyoponceAún no hay calificaciones
- Resumen NTC 4595Documento11 páginasResumen NTC 4595David DíazAún no hay calificaciones
- Trabajo Grupal 1° CicloDocumento3 páginasTrabajo Grupal 1° CicloGénesis Rodríguez VivancoAún no hay calificaciones
- Aforo de Caudal Del Rio Mungarra Del Municipio de Tad1Documento8 páginasAforo de Caudal Del Rio Mungarra Del Municipio de Tad1Ruby Jisela Molano RengifoAún no hay calificaciones
- Radicales Libres 50 Peliculas EsencialesDocumento28 páginasRadicales Libres 50 Peliculas Esencialesemito uAún no hay calificaciones
- Formato 01. Proyecto de Investigación-UltimoDocumento3 páginasFormato 01. Proyecto de Investigación-UltimoKatherin CcayaAún no hay calificaciones
- Secuencias Semestre Feb-Jun 11 Mod.5 Sub.m.1Documento33 páginasSecuencias Semestre Feb-Jun 11 Mod.5 Sub.m.1Katy MoralesAún no hay calificaciones
- Psicología SeminarioDocumento4 páginasPsicología SeminariokiritoAún no hay calificaciones
- Paso 2. Del 1 Al 8 de AbrilDocumento4 páginasPaso 2. Del 1 Al 8 de AbrilAndres Augusto Hernandez MartinezAún no hay calificaciones
- ValoracionDocumento36 páginasValoracionpingon4xAún no hay calificaciones
- Cras - CementoDocumento2 páginasCras - CementoDanny Torres DiazAún no hay calificaciones
- Peru AbejasDocumento20 páginasPeru AbejasJuan Gallardo VilchezAún no hay calificaciones
- Stock PickDocumento3 páginasStock PickDanielAún no hay calificaciones
- Riesgos de Orden Legal Inherentes A La InobservanciaDocumento12 páginasRiesgos de Orden Legal Inherentes A La InobservanciaOswaldoPérezAún no hay calificaciones
- PreliminaresDocumento12 páginasPreliminaresDayana ArqueAún no hay calificaciones
- TPM de Sierra de CintaDocumento4 páginasTPM de Sierra de CintaJair AlejandroAún no hay calificaciones
- PsicologíaDocumento157 páginasPsicologíaYoonkook foreverAún no hay calificaciones
- Fisio II Capitulo 56 PR23Documento39 páginasFisio II Capitulo 56 PR23BRYAN ALEJANDRO GONZALES CAMPOSAún no hay calificaciones
- Controversias Del Orden FamiliarDocumento12 páginasControversias Del Orden FamiliarYair Gonzalez0% (1)
- Taller 1 S14Documento4 páginasTaller 1 S14Rodrigo Raul Cornejo ArnicaAún no hay calificaciones
- Minería Subterránea, Definición, ConsideracionesDocumento13 páginasMinería Subterránea, Definición, ConsideracionesMiguel Noriega RiscoAún no hay calificaciones
- Diapositivas Del Acido SulfuricoDocumento20 páginasDiapositivas Del Acido SulfuricoDan CruzAún no hay calificaciones
- Annex 2 - C.V. TemplateDocumento1 páginaAnnex 2 - C.V. TemplateMiluAún no hay calificaciones
- Claudia Alicia Tovar UribeDocumento2 páginasClaudia Alicia Tovar UribeBradly RodriguezAún no hay calificaciones
- Patologia Laboral 201690Documento20 páginasPatologia Laboral 201690wilmerAún no hay calificaciones
- Daño A La Formación Por DisparosDocumento11 páginasDaño A La Formación Por DisparosAnnuar GarciaAún no hay calificaciones
- Matematica3 Semana 12 - Dia 1 Sistema de Ecuaciones II Ccesa007Documento5 páginasMatematica3 Semana 12 - Dia 1 Sistema de Ecuaciones II Ccesa007Demetrio Ccesa Rayme100% (1)
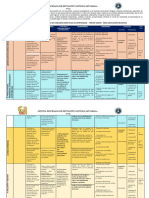
- Desarrollo Del Pensamiento (Guia para Prácticas Rediseño)Documento19 páginasDesarrollo Del Pensamiento (Guia para Prácticas Rediseño)VALERIA FERNANDA GUAMANI CANCHIGNIAAún no hay calificaciones
- T3 La Cerámica Del Período ClásicoDocumento12 páginasT3 La Cerámica Del Período ClásicoMayka MuñozAún no hay calificaciones