También podría gustarte
- Automatización electroneumática Métodos sistemáticos: Álgebra de Boole, cascada, paso a pasoDe EverandAutomatización electroneumática Métodos sistemáticos: Álgebra de Boole, cascada, paso a pasoAún no hay calificaciones
- Ejercicios PLCDocumento5 páginasEjercicios PLCGuilleOtalora50% (6)
- PRACTICAS PLCsDocumento41 páginasPRACTICAS PLCsMauricio Israel Martínez100% (4)
- GrafcetDocumento44 páginasGrafcetmartining23100% (2)
- Historia de La Planeación EstratégicaDocumento6 páginasHistoria de La Planeación EstratégicaAnonymous ADrLQRhRSOAún no hay calificaciones
- Ejercicios para LadderDocumento10 páginasEjercicios para LadderSilvio AguilarAún no hay calificaciones
- Trabajo de Adm. de Personal Modelo de Cuestionario para Análisis de PuestosDocumento5 páginasTrabajo de Adm. de Personal Modelo de Cuestionario para Análisis de PuestosJordy Zegarra Quispe50% (2)
- Ejercicios Basicos en FluidSimDocumento46 páginasEjercicios Basicos en FluidSimLuis Rogelio83% (6)
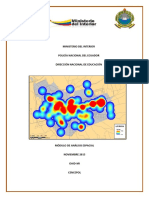
- Analisis EspacialDocumento27 páginasAnalisis EspacialJosé Marcelo Gudman SerratAún no hay calificaciones
- Anclajes Al ConcretoDocumento46 páginasAnclajes Al ConcretoNicolas Alberto Vasquez FrancoAún no hay calificaciones
- Proyectos de Automatizacic3b3n para Cpu s7 1200Documento21 páginasProyectos de Automatizacic3b3n para Cpu s7 1200Javier RubioAún no hay calificaciones
- Ejercicios de Grafcet - AdaptadosDocumento54 páginasEjercicios de Grafcet - AdaptadosAsier Sabin De Ormaetxea Garaizar100% (1)
- Cartilla de Ejercicios Completa PDFDocumento11 páginasCartilla de Ejercicios Completa PDFNarciso TorresAún no hay calificaciones
- Ejercicios Resueltos GrafcetDocumento13 páginasEjercicios Resueltos GrafcetCarlosAún no hay calificaciones
- EjerciciosS7 200Documento7 páginasEjerciciosS7 200el_peruanoAún no hay calificaciones
- Ejercicios LadderDocumento6 páginasEjercicios LadderArturo Esquivel Rendón67% (3)
- Catalogo Cargador Frontal Wa380 6 KomatsuDocumento12 páginasCatalogo Cargador Frontal Wa380 6 KomatsuGustavo Vargas100% (2)
- PracticaModuloII FestoDocumento76 páginasPracticaModuloII FestoJorgeL AvechucoOAún no hay calificaciones
- MÉTODO CASCADA Ejercio Desarrollados BaseDocumento11 páginasMÉTODO CASCADA Ejercio Desarrollados BaseLucho Roses100% (2)
- Ejercicios PLCDocumento9 páginasEjercicios PLCRodrigoAún no hay calificaciones
- EJEMPLOSDocumento12 páginasEJEMPLOSLucero Chontal EstudilloAún no hay calificaciones
- Ejercicios Resueltos Con GrafcetDocumento12 páginasEjercicios Resueltos Con GrafcetJuan Carlos Paterna67% (6)
- Ejercicios Resueltos GrafcetDocumento3 páginasEjercicios Resueltos GrafcetLaura Mayara Proenza GonzálezAún no hay calificaciones
- Manual de Ejercicios PLCDocumento23 páginasManual de Ejercicios PLCAgustin Vr57% (7)
- Ejercicios PLC ClaveDocumento15 páginasEjercicios PLC ClaveLizardo Meneses Rojas100% (1)
- El GRAFCET, Practicas y AplicacionesDocumento190 páginasEl GRAFCET, Practicas y AplicacionesEndrik Peluffo100% (3)
- Ejercicios AutomatismosDocumento15 páginasEjercicios AutomatismosRoberto Vt100% (1)
- Ejercicios Grafcet 1Documento9 páginasEjercicios Grafcet 1fragaenrique75% (4)
- Ejerciicios de PLCDocumento18 páginasEjerciicios de PLCmyst3ryon100% (2)
- Circutos NeuamticosDocumento21 páginasCircutos NeuamticosAnonymous SegCAngVY5100% (1)
- Reporte de Practicas PLCDocumento15 páginasReporte de Practicas PLCPedro LeonAún no hay calificaciones
- Ejercicios Ladder 2018Documento15 páginasEjercicios Ladder 2018Leobardo M. García Cruz50% (2)
- Ejercicios PLC EJ2014Documento5 páginasEjercicios PLC EJ2014Madianita EstradaAún no hay calificaciones
- Problemas de PLCDocumento8 páginasProblemas de PLCMelissa100% (2)
- Tema5 Ejercicios GrafcetDocumento32 páginasTema5 Ejercicios GrafcetKoko EsclntAún no hay calificaciones
- Quiz 1 HerramientasDocumento5 páginasQuiz 1 Herramientaslorena lomboAún no hay calificaciones
- Temario para Sistemas de Mandos Neumaticos e HidraulicosDocumento26 páginasTemario para Sistemas de Mandos Neumaticos e HidraulicosMichael Mendigure PumacharaAún no hay calificaciones
- Problemas Método Cascada en ElectroneumáticaDocumento3 páginasProblemas Método Cascada en Electroneumáticaborjander100% (5)
- 10 Ejemplos de Aplicaciones Industriales de Circuitos ElectroneumaticosDocumento46 páginas10 Ejemplos de Aplicaciones Industriales de Circuitos ElectroneumaticosAndrez Hernandez50% (20)
- Solucion SE Automatas-Grafcet UnlockedDocumento7 páginasSolucion SE Automatas-Grafcet Unlockedjuanito50% (2)
- Ejerciciosinicialesstep 7Documento9 páginasEjerciciosinicialesstep 7waldo65Aún no hay calificaciones
- Exa PLC U3Documento7 páginasExa PLC U3Alejandro Jaguar AlegriaAún no hay calificaciones
- Enunciados de Circuitos Electroneumaticos ChemaDocumento2 páginasEnunciados de Circuitos Electroneumaticos ChemaMariano RomanAún no hay calificaciones
- Ejercicios ElectroneumaticaDocumento7 páginasEjercicios Electroneumaticaanon_858245163Aún no hay calificaciones
- EVALUACIONDocumento7 páginasEVALUACIONanon_347879477Aún no hay calificaciones
- Electroneumatica AvanzadaDocumento4 páginasElectroneumatica AvanzadaBrayan VivasAún no hay calificaciones
- Exa PLC U4Documento8 páginasExa PLC U4Iglesia FeyPoder Ficjrm0% (1)
- Electroneumática Metodo Casaca y Paso A PasoDocumento47 páginasElectroneumática Metodo Casaca y Paso A PasoJunior FigueroaAún no hay calificaciones
- Ejercicios Neumatica PDFDocumento3 páginasEjercicios Neumatica PDFSergio Rodriguez ToroAún no hay calificaciones
- Extraordinario Automatizacion 2 - 2021Documento2 páginasExtraordinario Automatizacion 2 - 2021m gomezAún no hay calificaciones
- Electroneumática - EjerciciosDocumento9 páginasElectroneumática - Ejercicioszackselever7Aún no hay calificaciones
- Problemario Myo 2023Documento4 páginasProblemario Myo 2023Diego JosAún no hay calificaciones
- EjerciciosneumaticaDocumento8 páginasEjerciciosneumaticaAnonymous 4m0gtOZran100% (1)
- Ejercicios de ElectroneumaticaDocumento3 páginasEjercicios de ElectroneumaticaJoe TguerraAún no hay calificaciones
- Electron Eu Matic ADocumento3 páginasElectron Eu Matic ASuishyAún no hay calificaciones
- Guía de Ejercicios Resueltos - AutomatismoDocumento10 páginasGuía de Ejercicios Resueltos - Automatismokennyrules33Aún no hay calificaciones
- Delta - 2Documento2 páginasDelta - 2leonela salinasAún no hay calificaciones
- Guia Electroneumática Industrial 3Documento6 páginasGuia Electroneumática Industrial 3Yerko GutiAún no hay calificaciones
- Guia Ejercicios NeumaticaDocumento9 páginasGuia Ejercicios NeumaticaorigamiwolfAún no hay calificaciones
- PracticasDocumento4 páginasPracticasDavid GuarchajAún no hay calificaciones
- PP NeumaticaDocumento9 páginasPP NeumaticakatyAún no hay calificaciones
- EJERCICIOS NEUMATICA Taller de Clase EjemplosDocumento3 páginasEJERCICIOS NEUMATICA Taller de Clase EjemplosdevidAún no hay calificaciones
- Ejercicios FluidDocumento1 páginaEjercicios FluidNicolasZmbranoAún no hay calificaciones
- Proyectos ElectroneumaticaDocumento6 páginasProyectos ElectroneumaticaEddy Hugo Perez PierolaAún no hay calificaciones
- Ejercicios SecuenciasDocumento6 páginasEjercicios SecuenciasAlfredo ZepedaAún no hay calificaciones
- Ejercicios de Fluid SIMDocumento5 páginasEjercicios de Fluid SIMGabriel LARA ANGUIANOAún no hay calificaciones
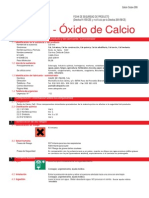
- Ficha de Seguridad 1Documento4 páginasFicha de Seguridad 1Carolina SolisAún no hay calificaciones
- Modelo Carta de RecomendacionDocumento1 páginaModelo Carta de RecomendacionCarolina SolisAún no hay calificaciones
- Pasos Generales para El Analisis QuimicoDocumento5 páginasPasos Generales para El Analisis QuimicoCarolina Solis100% (1)
- Antecedentes Históricos de La EstadísticaDocumento4 páginasAntecedentes Históricos de La EstadísticaCarolina SolisAún no hay calificaciones
- Mfi U 2Documento11 páginasMfi U 2Carolina SolisAún no hay calificaciones
- Pregunt 1Documento5 páginasPregunt 1Miluska MaldonadoAún no hay calificaciones
- La Historia Del AluminioDocumento5 páginasLa Historia Del AluminioMuñeqita KrystalAún no hay calificaciones
- Matem FinancieraDocumento44 páginasMatem FinancieraMarcela Garcia100% (1)
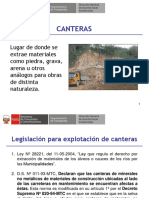
- Ambiental Canteras 5Documento24 páginasAmbiental Canteras 5juan nima100% (1)
- T Comput Ac I On Rodrigo de CastroDocumento228 páginasT Comput Ac I On Rodrigo de CastroДпђяеш ЯiисФиAún no hay calificaciones
- Trabajo Practico N - 6 TFC2014 PDFDocumento2 páginasTrabajo Practico N - 6 TFC2014 PDFCariitooFuentesAún no hay calificaciones
- Perú Fue El Mercado de Mayor Crecimiento para Cuponatic Durante 2012Documento2 páginasPerú Fue El Mercado de Mayor Crecimiento para Cuponatic Durante 2012Tecnología 21Aún no hay calificaciones
- Propuesta - Educ. Inicial-2018Documento34 páginasPropuesta - Educ. Inicial-2018Mirta BalconAún no hay calificaciones
- Ensayo de Energia Solar TermicaDocumento5 páginasEnsayo de Energia Solar Termicabrian sucasacaAún no hay calificaciones
- Prepuesto Cra 3556Documento150 páginasPrepuesto Cra 3556Justo MoralesAún no hay calificaciones
- Pórticos y Muros de Concreto Diseñado Por DesempeñoDocumento42 páginasPórticos y Muros de Concreto Diseñado Por DesempeñoJuan Carlos Guartasaca Ordóñez0% (2)
- Normas Icontec para Trabajos EscritosDocumento3 páginasNormas Icontec para Trabajos EscritosFelipe RamonAún no hay calificaciones
- Uso Del Correo Electrónico y Sus Dilemas ÉticosDocumento10 páginasUso Del Correo Electrónico y Sus Dilemas ÉticosPatricio Fernando Garcia Ibarra100% (1)
- Productividad Su Rol Y Sus DeterminantesDocumento2 páginasProductividad Su Rol Y Sus DeterminantesMiguelAún no hay calificaciones
- Familias LogicasDocumento6 páginasFamilias LogicasMaria Guadalupe GarciaAún no hay calificaciones
- Electrificación Rural PPT 1ra ParteDocumento81 páginasElectrificación Rural PPT 1ra ParteWill CoilaAún no hay calificaciones
- Suelos AR Inta ArgentinaDocumento27 páginasSuelos AR Inta Argentinaredalfs0% (1)
- 254 01 01 Modulo1 Atmosferica PDFDocumento139 páginas254 01 01 Modulo1 Atmosferica PDFYezidVeraAún no hay calificaciones
- Programa Cuna MasDocumento31 páginasPrograma Cuna Masdenys_791Aún no hay calificaciones
- Recarga Movil RealDocumento22 páginasRecarga Movil RealShirly Falla AcevedoAún no hay calificaciones
- Plantilla Afiliación TrabajadoresDocumento16 páginasPlantilla Afiliación TrabajadoresBidagroAún no hay calificaciones
- Manual Corporativo Carabobo FC - WebDocumento25 páginasManual Corporativo Carabobo FC - WebJefferson ReañoAún no hay calificaciones
- Proceso Productivo de Trucha ArcoirisDocumento3 páginasProceso Productivo de Trucha ArcoirisOmar RiscoAún no hay calificaciones