También podría gustarte
- Embutido PracticaDocumento6 páginasEmbutido PracticaMartha L Pv RAún no hay calificaciones
- Reproduccion Lobo y OsoDocumento4 páginasReproduccion Lobo y OsoJosse Vom KreuzAún no hay calificaciones
- Control anticipativo para sistemas lentosDocumento14 páginasControl anticipativo para sistemas lentosYuselys SaavedraAún no hay calificaciones
- 3.3 Función RampaDocumento9 páginas3.3 Función RampaRichar Flores MondragonAún no hay calificaciones
- Norma SAMADocumento20 páginasNorma SAMAAndReea MontalvoAún no hay calificaciones
- Control en CascadaDocumento25 páginasControl en CascadaDannyInchicsanaMedinaAún no hay calificaciones
- Practica 4: Determinacion de La Velocidad de Reaccion para Orden 1Documento9 páginasPractica 4: Determinacion de La Velocidad de Reaccion para Orden 1Vic LightYearAún no hay calificaciones
- ServomotoresDocumento6 páginasServomotoresReneru Lener Tashiro MakrisAún no hay calificaciones
- Diseño de control de razón para diluir NaOH al 30Documento2 páginasDiseño de control de razón para diluir NaOH al 30Diego PalaciosAún no hay calificaciones
- Samuel Garcia Escobar - Modelacion Dinamica de SistemasDocumento30 páginasSamuel Garcia Escobar - Modelacion Dinamica de SistemasAnne AlcantaraAún no hay calificaciones
- Leyes Fisicas para El Modelado de SistemasDocumento6 páginasLeyes Fisicas para El Modelado de SistemasAlejandro Isaí Becerra MalacaraAún no hay calificaciones
- Velocidad de reacción: Factores y energía de activaciónDocumento5 páginasVelocidad de reacción: Factores y energía de activaciónSantiago ValenciaAún no hay calificaciones
- Ley de NernstDocumento6 páginasLey de NernstFrancisco Antonio Galmich GonzalezAún no hay calificaciones
- Diagrama de BloquesDocumento4 páginasDiagrama de BloquesAnais RodAún no hay calificaciones
- Practica Cinética Reacción en Un Reactor BatchDocumento9 páginasPractica Cinética Reacción en Un Reactor BatchNelytasu Ktm RAún no hay calificaciones
- Practica 1Documento7 páginasPractica 1Masword HRAún no hay calificaciones
- Tipos de AdsorcionDocumento2 páginasTipos de AdsorcionCarolinaLópezAún no hay calificaciones
- Trazabilidad para AlimentosDocumento36 páginasTrazabilidad para AlimentosJesik TellezAún no hay calificaciones
- Tipos de controles y procesos automatizadosDocumento8 páginasTipos de controles y procesos automatizadosFreddcastAún no hay calificaciones
- Química CinéticaDocumento4 páginasQuímica CinéticaSofia Patiño OviedoAún no hay calificaciones
- Modelación Dinamica de Sistemas de ControlDocumento13 páginasModelación Dinamica de Sistemas de ControlBryan Omar MendozaAún no hay calificaciones
- RECALLDocumento2 páginasRECALLSANAún no hay calificaciones
- CONTROL EN CASCADA: APRENDIENDO SOBRE ESTE ÚTIL MÉTODO DE CONTROL DE PROCESOSDocumento3 páginasCONTROL EN CASCADA: APRENDIENDO SOBRE ESTE ÚTIL MÉTODO DE CONTROL DE PROCESOSPedro Manzanilla100% (1)
- Elementos primarios de control en procesos de molienda y empacadoDocumento4 páginasElementos primarios de control en procesos de molienda y empacadoMary l.100% (1)
- Práctica de DestilaciónDocumento18 páginasPráctica de DestilaciónMuny ZAAún no hay calificaciones
- Transferencia de Masa Infografia - Huanca Puma KatlynDocumento2 páginasTransferencia de Masa Infografia - Huanca Puma KatlynPEDRO FERNANDO ALEXANDER LAURA QUISPEAún no hay calificaciones
- Matriz de Responsabilidades.Documento5 páginasMatriz de Responsabilidades.Loan Martínez DiazAún no hay calificaciones
- Pre Actuadores para Circuitos HidráulicosDocumento7 páginasPre Actuadores para Circuitos HidráulicosVictor Manuel Prieto HernandezAún no hay calificaciones
- Cinetica QuimicaDocumento9 páginasCinetica Quimicamarit2504Aún no hay calificaciones
- Métodos de Sintonización de ControladoresDocumento12 páginasMétodos de Sintonización de ControladoresJosé Manuel CocolotlAún no hay calificaciones
- Secador de Charolas CompletoDocumento14 páginasSecador de Charolas CompletoDanny GarcíaAún no hay calificaciones
- Práctica 4 Dilatometria Laboratorio Integral IiDocumento13 páginasPráctica 4 Dilatometria Laboratorio Integral IiRodolfo Luis LimónAún no hay calificaciones
- Unidad 1. Fundamento de Simulacion.Documento13 páginasUnidad 1. Fundamento de Simulacion.Cesar Alberto Cansino PerezAún no hay calificaciones
- Sistema NeumaticoDocumento19 páginasSistema Neumaticocarlos ignacio loya sanchezAún no hay calificaciones
- Intercambiadores de CalorDocumento57 páginasIntercambiadores de CalorANDRES ANTHONY ACOSTA ALVITRESAún no hay calificaciones
- Portafolio de Evidencias Humberto Gracia NevarezDocumento27 páginasPortafolio de Evidencias Humberto Gracia NevarezHumberto Gracia NevarezAún no hay calificaciones
- 3.1 Transferencia de Cantidad de MovimientoDocumento16 páginas3.1 Transferencia de Cantidad de MovimientoChilamBalamAún no hay calificaciones
- Función de Excitación SenoidalDocumento21 páginasFunción de Excitación SenoidalArturo Lara RodriguezAún no hay calificaciones
- Evaluación Sensorial IntroducciónDocumento8 páginasEvaluación Sensorial IntroducciónHoldair AndradeAún no hay calificaciones
- Trámites para El Transporte de Residuos Peligrosos Ante La SCTDocumento3 páginasTrámites para El Transporte de Residuos Peligrosos Ante La SCTjennifer100% (1)
- Control Proporcional Integral ResumenDocumento6 páginasControl Proporcional Integral ResumenJessicaLópezAún no hay calificaciones
- Diseño de Una Columna de AdsorciónDocumento5 páginasDiseño de Una Columna de AdsorciónMemo TAún no hay calificaciones
- Variables Fisicas de La Instrumentacion IndustrialDocumento74 páginasVariables Fisicas de La Instrumentacion IndustrialEfra Joaquin0% (1)
- Lazos de Control de ProcesosDocumento4 páginasLazos de Control de Procesosluis pretellAún no hay calificaciones
- Bloques Funcionales de Sistemas FluidicosDocumento7 páginasBloques Funcionales de Sistemas Fluidicosalejandro martinez zanattaAún no hay calificaciones
- Control IntegralDocumento9 páginasControl IntegralGerardo Arturo Rivera De Santiago100% (1)
- Control AnticipativoDocumento20 páginasControl AnticipativoGrecia ChucAún no hay calificaciones
- Medidor de velocidad hilo calienteDocumento5 páginasMedidor de velocidad hilo calientePiyo Jimenez WilsonAún no hay calificaciones
- Modelacion Dinamica de Sistemas de Control Unidad 2Documento21 páginasModelacion Dinamica de Sistemas de Control Unidad 2Jason MaldonadoAún no hay calificaciones
- Procesos Industriales Caracteristicas de Los ProcesosDocumento7 páginasProcesos Industriales Caracteristicas de Los ProcesosAnonymous 63ZQ3RMCAún no hay calificaciones
- Estrategias Avanzadas de Control IDocumento24 páginasEstrategias Avanzadas de Control IMauricio SerranoAún no hay calificaciones
- Válvulas y TiposDocumento6 páginasVálvulas y TiposEdgardo HenriquezAún no hay calificaciones
- ADC DAC conversión digital análoga guíaDocumento7 páginasADC DAC conversión digital análoga guíajhonnymlf0% (1)
- Instrumentacion y Control de ProcesosDocumento16 páginasInstrumentacion y Control de Procesosmauro guerraAún no hay calificaciones
- MotoresDocumento12 páginasMotoresjavla2525Aún no hay calificaciones
- 4.5 ServoMotorDocumento41 páginas4.5 ServoMotorOLGER FABIAN CAMUENDO CABASCANGO100% (1)
- Propulsores C.A.Documento60 páginasPropulsores C.A.Danny López100% (1)
- Servo MotorDocumento20 páginasServo MotorIván Arturo Vázquez IsidoroAún no hay calificaciones
- Servomotor de ModelismoDocumento15 páginasServomotor de ModelismoJessica SariAún no hay calificaciones
- UF1217 - Mantenimiento de sistemas auxiliares del motor de ciclo dieselDe EverandUF1217 - Mantenimiento de sistemas auxiliares del motor de ciclo dieselCalificación: 3.5 de 5 estrellas3.5/5 (3)
- Lean+Manufacturing Implementation 2 PDFDocumento0 páginasLean+Manufacturing Implementation 2 PDFdenariraAún no hay calificaciones
- Administracion de Produccion y Operaciones - Norman Gaither y Greg FrazierDocumento669 páginasAdministracion de Produccion y Operaciones - Norman Gaither y Greg FrazierMartin Pedroza100% (1)
- Clasificacion de Pruebas No Parametricas SPSS PDFDocumento13 páginasClasificacion de Pruebas No Parametricas SPSS PDFDaniel RodriguezAún no hay calificaciones
- Telefono IP 7911 - Manual Del UsuarioDocumento88 páginasTelefono IP 7911 - Manual Del UsuariosergiorgAún no hay calificaciones
- 823 PDFDocumento195 páginas823 PDFdenariraAún no hay calificaciones
- Manual Minitab 16Documento122 páginasManual Minitab 16Nelson Cobba100% (10)
- 37 123 1 PB PDFDocumento4 páginas37 123 1 PB PDFdenariraAún no hay calificaciones
- PUB DOC Tabla AEN 7492 2 PDFDocumento8 páginasPUB DOC Tabla AEN 7492 2 PDFdenariraAún no hay calificaciones
- Práctica3-Cambio de Variable y Mínimos Cuadrados 2Documento4 páginasPráctica3-Cambio de Variable y Mínimos Cuadrados 2denariraAún no hay calificaciones
- Práctica3-Cambio de Variable y Mínimos Cuadrados 2Documento4 páginasPráctica3-Cambio de Variable y Mínimos Cuadrados 2denariraAún no hay calificaciones
- Catalogo MAZDocumento96 páginasCatalogo MAZdenariraAún no hay calificaciones
- Catalogo MAZDocumento96 páginasCatalogo MAZdenariraAún no hay calificaciones
- 1 Digital Audio WorkstationsDocumento7 páginas1 Digital Audio WorkstationsJ'band ArtisAún no hay calificaciones
- ACTIVIDAD 6 ElectivaDocumento4 páginasACTIVIDAD 6 ElectivaJAVIER ACUÑAAún no hay calificaciones
- Linea Del Tiempo de HondurasDocumento1 páginaLinea Del Tiempo de HondurasRAMON ANTUNEZ100% (1)
- Taller Flujos de Caja IV - ResueltoDocumento10 páginasTaller Flujos de Caja IV - Resueltosantiago otaloraAún no hay calificaciones
- Tractores agrícolas e implementos para la cosecha de cultivosDocumento43 páginasTractores agrícolas e implementos para la cosecha de cultivosEuler Portilla CarrascoAún no hay calificaciones
- Interes CompuestoDocumento8 páginasInteres CompuestoFelipe VergaraAún no hay calificaciones
- EETT ALcantarillado Y Agua PotableDocumento17 páginasEETT ALcantarillado Y Agua PotableFrancisco Javier Saavedra VigorenaAún no hay calificaciones
- Estudios de Suelos Calle 60 N 50A 64 VEGACHI Fabian Perez 2022Documento35 páginasEstudios de Suelos Calle 60 N 50A 64 VEGACHI Fabian Perez 2022Fernando GomezAún no hay calificaciones
- Tema 1 Introducción y Entorno de ProyectosDocumento43 páginasTema 1 Introducción y Entorno de ProyectosJAIROAún no hay calificaciones
- La Maquina de VaporDocumento2 páginasLa Maquina de Vaportutoria2c100% (1)
- Instructivo Homologacion Digital PDFDocumento14 páginasInstructivo Homologacion Digital PDFD Alejandro C UrregoAún no hay calificaciones
- Comunicación AnalogaDocumento19 páginasComunicación Analogasonia virginia hurtado pedrozaAún no hay calificaciones
- Tampico 1Documento6 páginasTampico 12-A Omar Santiago Moreno TorresAún no hay calificaciones
- Mapa MentalDocumento2 páginasMapa Mentalcasillas1961100% (1)
- Perfil de Proyecto R.tomasM Horno de InduccionE.Documento51 páginasPerfil de Proyecto R.tomasM Horno de InduccionE.Reynaldo Franz Ajata ChAún no hay calificaciones
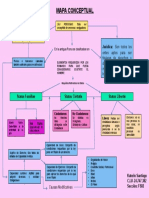
- Mapa ConceptualDocumento1 páginaMapa ConceptualLorena GalatiAún no hay calificaciones
- 100 MontaditosDocumento3 páginas100 MontaditosjosemanuelAún no hay calificaciones
- Word IansaDocumento19 páginasWord IansaDiegoMachadoAún no hay calificaciones
- Tarea 2 - Datos Geográficos y Aplicativos SIG - 358031 - 50Documento15 páginasTarea 2 - Datos Geográficos y Aplicativos SIG - 358031 - 50cesarAún no hay calificaciones
- Fallas y Soluciones Micronautra M3Documento4 páginasFallas y Soluciones Micronautra M3Mariano CastilloAún no hay calificaciones
- Caminando y MiandoDocumento2 páginasCaminando y MiandosgyhthtAún no hay calificaciones
- Infome de Gestión 2019-2022Documento36 páginasInfome de Gestión 2019-2022Comunicaciones Ciencias Económicas Universidad de AntioquiaAún no hay calificaciones
- Reglamento 4-27 Sustancias Quimicas Controladas en VoladurasDocumento46 páginasReglamento 4-27 Sustancias Quimicas Controladas en VoladurasJose Noel Herrera RodriguezAún no hay calificaciones
- Contrato Prosalud 2023Documento25 páginasContrato Prosalud 2023elianalandeogomezAún no hay calificaciones
- Arreglo 4K X 8 Con 512 X 4Documento8 páginasArreglo 4K X 8 Con 512 X 4arto99styleAún no hay calificaciones
- Desbridamiento de quemadurasDocumento4 páginasDesbridamiento de quemadurasEva Gomez Gutierrez100% (1)
- Ing Mecánico Electricista JJohnJimmy Portugal exp 10+ añosDocumento7 páginasIng Mecánico Electricista JJohnJimmy Portugal exp 10+ añosTorikus DepredadorAún no hay calificaciones
- Principio de Legalidad PresupuestarioDocumento24 páginasPrincipio de Legalidad PresupuestarioBryan SalazarAún no hay calificaciones
- Instrucciones Nivel Optico Leica Serie Na700Documento36 páginasInstrucciones Nivel Optico Leica Serie Na700Jose Rodriguez RosalesAún no hay calificaciones
- Manual k6Documento6 páginasManual k6aquaicejuanAún no hay calificaciones