También podría gustarte
- 100 Circuitos de Shields para MotoresDe Everand100 Circuitos de Shields para MotoresCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Memorias Automatas Daniel Rocha CrespoDocumento38 páginasMemorias Automatas Daniel Rocha CrespoJosé Ignacio Mendieta CamargoAún no hay calificaciones
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorDe EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorAún no hay calificaciones
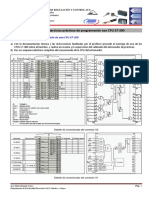
- Ejercicios de Programacic3b3n Con s7 300 1c2aa Parte PDFDocumento7 páginasEjercicios de Programacic3b3n Con s7 300 1c2aa Parte PDFefrenvoAún no hay calificaciones
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- El Automata M340 - ProblemasDocumento261 páginasEl Automata M340 - ProblemasRonald Paucara CallasiAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- EjerciciosDocumento6 páginasEjerciciosFrancisco de Paula González Rodríguez0% (1)
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDe EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosCalificación: 5 de 5 estrellas5/5 (5)
- Guía de PLC N1 - 2019Documento7 páginasGuía de PLC N1 - 2019Oscar SotoAún no hay calificaciones
- Ejercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiDe EverandEjercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiCalificación: 5 de 5 estrellas5/5 (1)
- Semaforo WDocumento9 páginasSemaforo WMannevar Ocupa Flores NarkinAún no hay calificaciones
- Ejerciciosinicialesstep 7Documento9 páginasEjerciciosinicialesstep 7waldo65Aún no hay calificaciones
- Practicas PLCDocumento14 páginasPracticas PLCSalma G. Garcia la Sienra100% (1)
- EJER T5 Instalaciones Domóticas Autómatas ProgramablesDocumento7 páginasEJER T5 Instalaciones Domóticas Autómatas ProgramablestrunkslvlAún no hay calificaciones
- Practica1 3P Simulacion de Sistemas IndustrialesDocumento2 páginasPractica1 3P Simulacion de Sistemas IndustrialesJHONNY PAUCARAún no hay calificaciones
- 5-Ejercitacion de Logicas de ControlDocumento10 páginas5-Ejercitacion de Logicas de ControlPatricio Antonio Cortés PeñaAún no hay calificaciones
- Ejercicios de Digitales II - Problemas Práctico 2014Documento16 páginasEjercicios de Digitales II - Problemas Práctico 2014PatoAún no hay calificaciones
- Practica 3. Manejo de SubrutinasDocumento7 páginasPractica 3. Manejo de Subrutinasscrap732Aún no hay calificaciones
- Manual Practico PLC AvanzadoDocumento28 páginasManual Practico PLC Avanzadofenixanabantha100% (2)
- Examen PLCDocumento13 páginasExamen PLCDaniel ArevaloAún no hay calificaciones
- Ejercicios Con Step 7Documento66 páginasEjercicios Con Step 7Nicolas Toledano Brito100% (1)
- Exam Sustitutorio 2022-IiDocumento2 páginasExam Sustitutorio 2022-IiFranklin MendozaAún no hay calificaciones
- Practicas 1Documento5 páginasPracticas 1henry cumbeAún no hay calificaciones
- Turnero Digital Con PICDocumento4 páginasTurnero Digital Con PICSegundo Santiago Cardenas VasquezAún no hay calificaciones
- Informe Final Nº3 (Vargas Calua Michael Rodrigo)Documento22 páginasInforme Final Nº3 (Vargas Calua Michael Rodrigo)MICHAEL RODRIGO VARGAS CALUAAún no hay calificaciones
- Tarea 2FC - Control de Encendido y Apagado de Dos Motores ElectricosDocumento13 páginasTarea 2FC - Control de Encendido y Apagado de Dos Motores ElectricosCarlos Javier Zambrano100% (1)
- Semáforo Con PLCDocumento13 páginasSemáforo Con PLCFrancisco CH100% (2)
- Practica 3 - Semaforo Con LimitsDocumento12 páginasPractica 3 - Semaforo Con LimitsDavid SanAún no hay calificaciones
- 06 - Apéndice FDocumento70 páginas06 - Apéndice FLuis TavisAún no hay calificaciones
- Ejercicios de PLCDocumento66 páginasEjercicios de PLCAnonymous cGDpjzI100% (1)
- Practica Semaforo PLCDocumento5 páginasPractica Semaforo PLCJeSsikaTelloAún no hay calificaciones
- Programación P.L.C.Documento14 páginasProgramación P.L.C.Luis Ernesto LealAún no hay calificaciones
- Laboratorio 3Documento7 páginasLaboratorio 3Gianella Eyzaguirre LeonAún no hay calificaciones
- Consolidado Proyecto Final Electronica IndustrialDocumento15 páginasConsolidado Proyecto Final Electronica Industrialnewman135_277960859Aún no hay calificaciones
- Guia de Trabajos Practicos Sistemas CombinacionalesDocumento11 páginasGuia de Trabajos Practicos Sistemas CombinacionalesMica OrtizAún no hay calificaciones
- Electrónica Sin SolucionesDocumento19 páginasElectrónica Sin SolucionesAdrian GarciaAún no hay calificaciones
- Examen Final 2022-IIDocumento2 páginasExamen Final 2022-IIKennedy LionelAún no hay calificaciones
- P1 3° Parcial PROGRAMACIÓN DEL PLC ALLEN BRADLEY EN LOGIXPRO Y PROSIM IIDocumento13 páginasP1 3° Parcial PROGRAMACIÓN DEL PLC ALLEN BRADLEY EN LOGIXPRO Y PROSIM IIJHONNY PAUCARAún no hay calificaciones
- Previa de Ciruitos (Circuitos de SEGUNDO Orden)Documento10 páginasPrevia de Ciruitos (Circuitos de SEGUNDO Orden)Matthew VincentAún no hay calificaciones
- Guia 4Documento6 páginasGuia 4Anonymous 3cj0ISjROLAún no hay calificaciones
- CAPITULO 3 - Aprendiendo A Programar PDFDocumento21 páginasCAPITULO 3 - Aprendiendo A Programar PDFEduardo Luis LicetAún no hay calificaciones
- Practica 8 Y9Documento21 páginasPractica 8 Y9Diego Jiménez100% (1)
- Programación de MCUDocumento28 páginasProgramación de MCUapi-27535945100% (2)
- DescdDocumento5 páginasDescdFrancisco JuarezAún no hay calificaciones
- Compuertas AplicacionesDocumento20 páginasCompuertas AplicacionesFernando Rodriguez100% (1)
- Trabajo FFDocumento4 páginasTrabajo FFJose AlejandroAún no hay calificaciones
- Tarea 2 - PLC Logo SiemensDocumento6 páginasTarea 2 - PLC Logo SiemensHugo100% (1)
- 14 de Mayo 10° Clase Unidad Iii Sección X Grafcet (Parte I) Automat Viernes Ing Gilberto AparicioDocumento27 páginas14 de Mayo 10° Clase Unidad Iii Sección X Grafcet (Parte I) Automat Viernes Ing Gilberto AparicioJuan RodriguezAún no hay calificaciones
- REPORTE UNIDAD 1 Dispositivos ProgramablesDocumento10 páginasREPORTE UNIDAD 1 Dispositivos ProgramablesMario Atilano GallegoAún no hay calificaciones
- Ejemplos TemporizadoresDocumento17 páginasEjemplos TemporizadoresEmilio BonnetAún no hay calificaciones
- Manual de Asignatura PLC 2Documento24 páginasManual de Asignatura PLC 2Jorge L. Aguilar MartínezAún no hay calificaciones
- Semaforo PDFDocumento4 páginasSemaforo PDFWalter Mamani CcasaAún no hay calificaciones
- Laboratorio 3 Quille Apaza ElvisDocumento10 páginasLaboratorio 3 Quille Apaza ElvisSamuel Gerardo Gonzales PachoAún no hay calificaciones
- Retos MAQ IDocumento17 páginasRetos MAQ Icristopher oroscoAún no hay calificaciones
- actividaYTYd 2Documento18 páginasactividaYTYd 2WILFREDO ALANYA PESUAAún no hay calificaciones
- Reporte de Red Semafórica ProyectoDocumento10 páginasReporte de Red Semafórica ProyectoNohemí Sánchez100% (1)
- Copia de Unidad 3-2022Documento17 páginasCopia de Unidad 3-2022BERENICE ABIGAIL HERNANDEZ TRUJILLOAún no hay calificaciones
- Motor A PasosDocumento22 páginasMotor A Pasosmiguel angel botello padillaAún no hay calificaciones
- Solución Problemas Zen de Omron-Hoja 2Documento9 páginasSolución Problemas Zen de Omron-Hoja 2Marcelo Adrian Quintana Gutierrez100% (1)
- Los Sistemas de Control y Sus ComponentesDocumento12 páginasLos Sistemas de Control y Sus ComponentesyelitzasalazarAún no hay calificaciones
- De Los Sistemas Cableados A Los Sistemas ProgramadosDocumento10 páginasDe Los Sistemas Cableados A Los Sistemas ProgramadosMiguel Sanchez BravoAún no hay calificaciones
- Instrumentacion Electrónica de ComunicacionesDocumento25 páginasInstrumentacion Electrónica de ComunicacioneskapsjorgeAún no hay calificaciones
- Simbología ISADocumento24 páginasSimbología ISAMiguel Sanchez BravoAún no hay calificaciones
- Artículo Científico (2c)Documento9 páginasArtículo Científico (2c)Miguel Sanchez BravoAún no hay calificaciones
- LinealizacionDocumento24 páginasLinealizacionMiguel Sanchez BravoAún no hay calificaciones
- Modelado, Control y Simulación de Un Sistema Péndulo Invertido Sobre Base MóvilDocumento6 páginasModelado, Control y Simulación de Un Sistema Péndulo Invertido Sobre Base MóvilMiguel Sanchez BravoAún no hay calificaciones
- P 4 AelectronDocumento10 páginasP 4 AelectronMiguel Sanchez BravoAún no hay calificaciones
- Practica 07Documento2 páginasPractica 07Miguel Sanchez BravoAún no hay calificaciones
- Control Nivel y Flujo (Ballen, Rojas, Gonzalez)Documento7 páginasControl Nivel y Flujo (Ballen, Rojas, Gonzalez)Miguel Sanchez BravoAún no hay calificaciones
- Teoría de Sistemas y Señales: Trabajo Práctico #2 Simulación Digital de Sistemas DinámicosDocumento16 páginasTeoría de Sistemas y Señales: Trabajo Práctico #2 Simulación Digital de Sistemas DinámicosMiguel Sanchez BravoAún no hay calificaciones
- Manual de Fluid SimDocumento29 páginasManual de Fluid SimCesar Ali Olivas RoldanAún no hay calificaciones
- T1856 PDFDocumento239 páginasT1856 PDFGustavo CuatzoAún no hay calificaciones
- Programa Higiene IndustrialDocumento2 páginasPrograma Higiene Industrialclaudia cruzAún no hay calificaciones
- POOA Teoría 9. Programación Concurrente (I)Documento79 páginasPOOA Teoría 9. Programación Concurrente (I)fibob32694Aún no hay calificaciones
- PD Tres en Raya Primero El Mejor 2019 2Documento5 páginasPD Tres en Raya Primero El Mejor 2019 2VVVVVVVVVVVVVVAún no hay calificaciones
- Tarea SemestralDocumento6 páginasTarea SemestralGonzalo Eduardo Luarte PachecoAún no hay calificaciones
- APE2 - Ariel Torres - Sistemas OperativosDocumento12 páginasAPE2 - Ariel Torres - Sistemas OperativosAriel Sebastian Torres AlvaradoAún no hay calificaciones
- Listado de Todos Los Códigos de ErrorDocumento68 páginasListado de Todos Los Códigos de ErrorJuan GomezAún no hay calificaciones
- Programación 0Documento2 páginasProgramación 0ESTEFANIAQAún no hay calificaciones
- Informatica BasicaDocumento3 páginasInformatica BasicabetemeAún no hay calificaciones
- Arquitectura Interna Del AutómataDocumento18 páginasArquitectura Interna Del AutómataAlejandro Fernández RoldánAún no hay calificaciones
- Manual Gps Utility v11Documento17 páginasManual Gps Utility v11Juan Diego Chavarría RojasAún no hay calificaciones
- E Manual CF2Documento116 páginasE Manual CF2Ivan Lopez MartinezAún no hay calificaciones
- Clase2 AlgoritmosDocumento32 páginasClase2 AlgoritmosCarlos DíazAún no hay calificaciones
- Contrato de Licencias e Implementacion Dicosavi Con MembreteDocumento9 páginasContrato de Licencias e Implementacion Dicosavi Con Membretepidrovo_1Aún no hay calificaciones
- Arquitectura Basica de Un ComputadorDocumento4 páginasArquitectura Basica de Un ComputadorKaleb MejiaAún no hay calificaciones
- Definición de SocketDocumento20 páginasDefinición de SocketCristina H. HernandezAún no hay calificaciones
- Formato Evidencia Software ProgramacionDocumento6 páginasFormato Evidencia Software ProgramacionCesar BenavidesAún no hay calificaciones
- Técnólogo en Gestión de Recursos NaturalesDocumento32 páginasTécnólogo en Gestión de Recursos NaturalesPerdoname Por Favor56% (9)
- Uso de La Matemática en La InformáticaDocumento2 páginasUso de La Matemática en La InformáticaLeen Vásquez57% (7)
- Proyectos Con CodeBlocks v.1112Documento30 páginasProyectos Con CodeBlocks v.1112LoLo FernándezAún no hay calificaciones
- Instructivo SPIDocumento29 páginasInstructivo SPIBLUE FOREVERAún no hay calificaciones
- Uso de CheckboxDocumento2 páginasUso de CheckboxTETOMARTINEZAún no hay calificaciones
- 3º El Conjunto de Los Componentes Lógicos de Un Ordenador Se DenominaDocumento7 páginas3º El Conjunto de Los Componentes Lógicos de Un Ordenador Se DenominaDamian Argañaraz100% (1)
- Practica Introductoria A MPLABDocumento23 páginasPractica Introductoria A MPLABchafikal25Aún no hay calificaciones
- Computación III-Tema 01Documento17 páginasComputación III-Tema 01Ray Caleb Pérez De La SotaAún no hay calificaciones
- Auditoria AdministrativaDocumento12 páginasAuditoria AdministrativaKeiiFiigonMdzaAún no hay calificaciones
- Enrique Ortega EdrosoDocumento16 páginasEnrique Ortega Edrosogerald ochoa perezAún no hay calificaciones
- Manual de Aspel (COI-contabilidad NOI-nómina) PDFDocumento199 páginasManual de Aspel (COI-contabilidad NOI-nómina) PDFmontano2379Aún no hay calificaciones
- Campos DireccionalesDocumento7 páginasCampos DireccionalesAndres CastilloAún no hay calificaciones
- Vse 880 Installation Guide Es-EsDocumento38 páginasVse 880 Installation Guide Es-EsRoberto Santiago Portilla ProañoAún no hay calificaciones