También podría gustarte
- Circuitos Electronicos 1 EjerciciosDocumento66 páginasCircuitos Electronicos 1 EjerciciosJesus Rosas MontalvoAún no hay calificaciones
- Grupo 24 Fase 4 LineiderMapuraDocumento24 páginasGrupo 24 Fase 4 LineiderMapuraLuis SanchezAún no hay calificaciones
- Laboratorio Nº1 - Sistemas de Control IIDocumento8 páginasLaboratorio Nº1 - Sistemas de Control IIVladimir Falcon LunaAún no hay calificaciones
- PRATICA 1 GRUPO 4 INFORME Oriana Medina, Miguelangel NahyDocumento25 páginasPRATICA 1 GRUPO 4 INFORME Oriana Medina, Miguelangel NahyRicardo TorresAún no hay calificaciones
- PEP1 SEP 1s2022 - PAUTADocumento10 páginasPEP1 SEP 1s2022 - PAUTAcristian_miranda_mAún no hay calificaciones
- Taller de Boylestad FloydDocumento14 páginasTaller de Boylestad FloydMiguelAngelQuimbitaAún no hay calificaciones
- 17-24 Circuitos 2Documento3 páginas17-24 Circuitos 2jheisson kisimotoAún no hay calificaciones
- 20141sicf011318 2Documento5 páginas20141sicf011318 2Leonardo JaramilloAún no hay calificaciones
- TRABAJO DE Test - RetestDocumento12 páginasTRABAJO DE Test - RetestyeiloAún no hay calificaciones
- Telecomunicaciones 2 - 01l - 90g - Laboratorio 1 - Ramirez - HuamanDocumento21 páginasTelecomunicaciones 2 - 01l - 90g - Laboratorio 1 - Ramirez - Huamanroberto vilcaAún no hay calificaciones
- ResonanciaDocumento4 páginasResonanciaJulián BustosAún no hay calificaciones
- Informe 4 Laboratorio Fisica 3 (Ley de Ohm)Documento10 páginasInforme 4 Laboratorio Fisica 3 (Ley de Ohm)Mztico PentdragonAún no hay calificaciones
- Informe Final 5 - Divisor de TensiónDocumento17 páginasInforme Final 5 - Divisor de TensiónAna SimonAún no hay calificaciones
- Diapositivas Test - RetestDocumento12 páginasDiapositivas Test - RetestyeiloAún no hay calificaciones
- Rectificador de Onda CompletaDocumento3 páginasRectificador de Onda CompletaPato GomezAún no hay calificaciones
- 3B Curva de PolarizaciónDocumento7 páginas3B Curva de PolarizaciónalexanderAún no hay calificaciones
- José Pérez DyT Problemas BJTDocumento6 páginasJosé Pérez DyT Problemas BJTJose Luis Perez SantillanAún no hay calificaciones
- Sa - 2021-09-03Documento2 páginasSa - 2021-09-03Diego GutiérrezAún no hay calificaciones
- Examen Ordinario SOLUCIÓN Fundamentos de AutomáticaDocumento9 páginasExamen Ordinario SOLUCIÓN Fundamentos de AutomáticanoesverdahAún no hay calificaciones
- Convertidor BockDocumento8 páginasConvertidor BockGeovanny NugraAún no hay calificaciones
- Ensayo en Corto CircuitoDocumento6 páginasEnsayo en Corto Circuitowill villcaAún no hay calificaciones
- Capítulo 4. Estadígrafos de DispersiónDocumento11 páginasCapítulo 4. Estadígrafos de DispersiónAdhemar Rojas100% (2)
- Analisis de Convertidores CD-CADocumento10 páginasAnalisis de Convertidores CD-CAJason BournAún no hay calificaciones
- Espacios de Estados (Motor)Documento7 páginasEspacios de Estados (Motor)Ivan SanchezAún no hay calificaciones
- U1 - Fuente - MR - Eduardo MartinDocumento5 páginasU1 - Fuente - MR - Eduardo MartinLalo MorenoAún no hay calificaciones
- Ortogonalidad y SeriesDocumento19 páginasOrtogonalidad y SeriesStuardo SagastumeAún no hay calificaciones
- CIRCUITOS ELECTRICOS TOMO I II Solucionario de Circuitos Electricos de Joseph A Edminister Schaum PDFDocumento551 páginasCIRCUITOS ELECTRICOS TOMO I II Solucionario de Circuitos Electricos de Joseph A Edminister Schaum PDFMarco López Chilca100% (4)
- Tema1 - Teoria InversoresDocumento25 páginasTema1 - Teoria InversoresEduardo TaitaAún no hay calificaciones
- Caso Practico Unidad 3Documento6 páginasCaso Practico Unidad 3JUNTA ACCION COMUNALAún no hay calificaciones
- Diseño de AtenuadoRDocumento9 páginasDiseño de AtenuadoRNixon IsraelAún no hay calificaciones
- Lab 5 Medidas Electricas Roberto Pineda VillanuevaDocumento10 páginasLab 5 Medidas Electricas Roberto Pineda VillanuevaRoberto Pineda VillanuevaAún no hay calificaciones
- 42 AmplificadorInstrumentacionDocumento11 páginas42 AmplificadorInstrumentacionKenneth Navarro ChavarriaAún no hay calificaciones
- Tarea 7.1 ElectrotécniaDocumento4 páginasTarea 7.1 ElectrotécniaAbraham TorosAún no hay calificaciones
- Función Escalón UnitarioDocumento6 páginasFunción Escalón UnitarioCristina OvalleAún no hay calificaciones
- Grupo - 203039 - 4 - Fase 4 - 203039Documento44 páginasGrupo - 203039 - 4 - Fase 4 - 203039Luis SanchezAún no hay calificaciones
- Problemas Convertidores DC-DCDocumento9 páginasProblemas Convertidores DC-DCJherson Miranda CabanillasAún no hay calificaciones
- Cuaderno Tercer ParcialDocumento29 páginasCuaderno Tercer ParcialMary PumashuntaAún no hay calificaciones
- Grupo 4.hoja de Trabajo 11Documento9 páginasGrupo 4.hoja de Trabajo 11Alex HaroAún no hay calificaciones
- Ejercicio 6.1 y 6.3Documento4 páginasEjercicio 6.1 y 6.3Adrian Reyes Galaviz100% (1)
- Ejercicio de ConfiabilidadDocumento8 páginasEjercicio de ConfiabilidadCarlosTapiaCabelAún no hay calificaciones
- Ley de CoulombDocumento2 páginasLey de CoulombEdy SamAún no hay calificaciones
- Practica 5Documento7 páginasPractica 5Ovalle Patiño RaulAún no hay calificaciones
- Informe Previo 5 - Divisor de TensiónDocumento10 páginasInforme Previo 5 - Divisor de TensiónAna Simon0% (1)
- Ejer Cici OsDocumento66 páginasEjer Cici OsLucho OrdóñezAún no hay calificaciones
- 2.5 Exp - ImpedanciaDocumento8 páginas2.5 Exp - ImpedanciaJannesy Rangel100% (1)
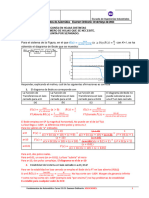
- Problema PTC0004-24 para Señal de MuestreoDocumento7 páginasProblema PTC0004-24 para Señal de MuestreoPabloCárdenasGAún no hay calificaciones
- Procedimientos de A - DDocumento10 páginasProcedimientos de A - DDavid Arian Rojas JaraAún no hay calificaciones
- Lab 5 - Potencia InstantaneaDocumento8 páginasLab 5 - Potencia Instantaneanicolas melendezAún no hay calificaciones
- Sesion 6: Conexión de Impedancias: Iii.-Elementos A UtilizarDocumento18 páginasSesion 6: Conexión de Impedancias: Iii.-Elementos A UtilizarJozeph NeirAún no hay calificaciones
- Laboratorio 1 - Comunicaciones AnalogicasDocumento3 páginasLaboratorio 1 - Comunicaciones AnalogicasVlade RamirezAún no hay calificaciones
- LAB2Documento17 páginasLAB2Samuel RodriguezAún no hay calificaciones
- Tarea No. 2 - Corte-2Documento7 páginasTarea No. 2 - Corte-2Sergio Andres Fajardo SaldarriagaAún no hay calificaciones
- Certamen 2 CSE 2020Documento4 páginasCertamen 2 CSE 2020Hector GonzalezAún no hay calificaciones
- Practica 8-Osciloscopio PDFDocumento31 páginasPractica 8-Osciloscopio PDFBRAYANAún no hay calificaciones
- Ley de Ohm Grupo 2 PDFDocumento9 páginasLey de Ohm Grupo 2 PDFFabiánAún no hay calificaciones
- TrabajoParcial - PDS - UNI - Maestria - 2020 - 02 JE Quispe y S MedinaDocumento26 páginasTrabajoParcial - PDS - UNI - Maestria - 2020 - 02 JE Quispe y S MedinaSergio MedinaAún no hay calificaciones
- Ejercicios de potencia, series de Taylor y FourierDe EverandEjercicios de potencia, series de Taylor y FourierAún no hay calificaciones
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- Corsa PDFDocumento198 páginasCorsa PDFMarco BecerraAún no hay calificaciones
- Acta Socialización 2020 I V3 Grupo HDocumento2 páginasActa Socialización 2020 I V3 Grupo Hsartocol87Aún no hay calificaciones
- FGA 23-Expresion - Grafica - I COMPLETODocumento6 páginasFGA 23-Expresion - Grafica - I COMPLETOsartocol87Aún no hay calificaciones
- Acta Socialización 2020 I V3 Grupo HDocumento2 páginasActa Socialización 2020 I V3 Grupo Hsartocol87Aún no hay calificaciones
- Fga 152 Asistencia ClaseDocumento1 páginaFga 152 Asistencia Clasesartocol87Aún no hay calificaciones
- Taller de Identificacion de Las Herramientas Office 365Documento1 páginaTaller de Identificacion de Las Herramientas Office 365sartocol87Aún no hay calificaciones
- Taller de Identificacion de Las Herramientas Office 365Documento1 páginaTaller de Identificacion de Las Herramientas Office 365sartocol87Aún no hay calificaciones
- Registros Saady Alberto Garcia GalvisDocumento5 páginasRegistros Saady Alberto Garcia Galvissartocol87Aún no hay calificaciones
- Ejericio 3 # 5-Trigonometria-Saady Alberto GArcia Galvis-301301 - 45Documento5 páginasEjericio 3 # 5-Trigonometria-Saady Alberto GArcia Galvis-301301 - 45sartocol87Aún no hay calificaciones
- Reto 4 - Un Bienestar para Ti-Saady Alberto Garcia Galvis-80017371Documento8 páginasReto 4 - Un Bienestar para Ti-Saady Alberto Garcia Galvis-80017371sartocol87Aún no hay calificaciones
- Tarea 3-301301 45-Saady Alberto Garcia GalvisDocumento17 páginasTarea 3-301301 45-Saady Alberto Garcia Galvissartocol87Aún no hay calificaciones
- PREGUNTASPIDocumento8 páginasPREGUNTASPIsartocol87Aún no hay calificaciones
- Tarea 2-Trigonometria-301301 45-Saady Alberto Garcia GalvisDocumento15 páginasTarea 2-Trigonometria-301301 45-Saady Alberto Garcia Galvissartocol87Aún no hay calificaciones
- Propiedad Intelectual Saady Alberto GArcia GalvisDocumento8 páginasPropiedad Intelectual Saady Alberto GArcia Galvissartocol87Aún no hay calificaciones
- Articulo Saady Alberto Garcia GalvisDocumento12 páginasArticulo Saady Alberto Garcia Galvissartocol87Aún no hay calificaciones
- 8 ObsDPI PI PDFDocumento2 páginas8 ObsDPI PI PDFsartocol87Aún no hay calificaciones
- La Propiedad Intelectual en Tu Vida OMPI PDFDocumento7 páginasLa Propiedad Intelectual en Tu Vida OMPI PDFFlor MaAún no hay calificaciones
- 9 Cuestionessobre PI PDFDocumento5 páginas9 Cuestionessobre PI PDFsartocol87Aún no hay calificaciones
- Sinergia Marco Logico Pmbok Iso 9001 2000 PDFDocumento13 páginasSinergia Marco Logico Pmbok Iso 9001 2000 PDFsartocol87Aún no hay calificaciones
- 003RR001Documento4 páginas003RR001Karl MontesAún no hay calificaciones
- Propiedad Intelectual2 PDFDocumento9 páginasPropiedad Intelectual2 PDFCielo Lizarazo LinaresAún no hay calificaciones
- 5 Patente PIDocumento7 páginas5 Patente PIsartocol87Aún no hay calificaciones
- 7 CompDesleal PI PDFDocumento3 páginas7 CompDesleal PI PDFsartocol87Aún no hay calificaciones
- 001IN001Documento3 páginas001IN001Paul CAún no hay calificaciones
- 3 IGeograf PIDocumento5 páginas3 IGeograf PIsartocol87Aún no hay calificaciones
- 6 DerObtentor PIDocumento7 páginas6 DerObtentor PIsartocol87Aún no hay calificaciones
- Mediacion Pedagogica PDFDocumento12 páginasMediacion Pedagogica PDFGabriela BaezAún no hay calificaciones
- Curso PLC-4Documento25 páginasCurso PLC-4Steven Dave QRAún no hay calificaciones
- 4 DerIndust PIDocumento5 páginas4 DerIndust PIsartocol87Aún no hay calificaciones
- Aproximación Conceptual de La Docencia Mediada Por Las Tecnologías de La Información y La Comunicación Actualizado.Documento9 páginasAproximación Conceptual de La Docencia Mediada Por Las Tecnologías de La Información y La Comunicación Actualizado.sartocol87Aún no hay calificaciones
- La PerspectivaDocumento2 páginasLa PerspectivaJherandil BarruetaAún no hay calificaciones
- Presentación Muros de Gaviones Carrasco para HoyDocumento91 páginasPresentación Muros de Gaviones Carrasco para HoyJohnny Ccatamayo BAún no hay calificaciones
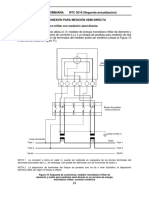
- NTC 5019 - 2007 Selección de Equipos de Medición de Energia ElectricaDocumento13 páginasNTC 5019 - 2007 Selección de Equipos de Medición de Energia ElectricaBreiner CortesAún no hay calificaciones
- Técnicas Urbanisticas y Constructivas IncasDocumento10 páginasTécnicas Urbanisticas y Constructivas IncasKathelim B'CabreraAún no hay calificaciones
- G - SSHH 01 - PlantaDocumento1 páginaG - SSHH 01 - PlantaRaúl Manuel Espinoza RetamozoAún no hay calificaciones
- Banner ReservorioDocumento1 páginaBanner ReservorioJoseph EspinozaAún no hay calificaciones
- Memoria Descriptiva de Instalaciones SanitariasDocumento3 páginasMemoria Descriptiva de Instalaciones SanitariasLeticia MamaniAún no hay calificaciones
- 10 - PasarelasDocumento37 páginas10 - PasarelasMathias Bonilla100% (1)
- Modulo 3 Fasciculo 7 Hacer Armadura para Placa Hacer Paneles Encofrar Placa Con PanelesDocumento67 páginasModulo 3 Fasciculo 7 Hacer Armadura para Placa Hacer Paneles Encofrar Placa Con PanelesKike Ton Asugusto Castañeda100% (1)
- ORDENANZASDocumento53 páginasORDENANZASreaxiumAún no hay calificaciones
- Central HidroeléctricaDocumento3 páginasCentral HidroeléctricaMiguelulaAún no hay calificaciones
- RD500 20201105Documento1 páginaRD500 20201105Juan Carlos Ludeña ChoqueAún no hay calificaciones
- Trabajo de Investigacion # 3 (Sensores)Documento3 páginasTrabajo de Investigacion # 3 (Sensores)Jimena Encinas López0% (1)
- PertDocumento35 páginasPertpatriciaAún no hay calificaciones
- Man. Asistida, Computadora y C Numérico 31 - 08 - 21Documento49 páginasMan. Asistida, Computadora y C Numérico 31 - 08 - 21David GonzalezAún no hay calificaciones
- Seccionamiento de Canal de Irrigacion, Pampa Del ArcoDocumento14 páginasSeccionamiento de Canal de Irrigacion, Pampa Del ArcoTony ConTreras FernandezAún no hay calificaciones
- Temario Sistemas Información GerencialDocumento6 páginasTemario Sistemas Información Gerencialjc2010gpAún no hay calificaciones
- Discurso (Joselyn Chicaiza)Documento2 páginasDiscurso (Joselyn Chicaiza)Joselyn ChicaizaAún no hay calificaciones
- ManualDocumento16 páginasManualAlejandraAún no hay calificaciones
- Beneficios Gps Segursat Autonort 1Documento1 páginaBeneficios Gps Segursat Autonort 1Hansito Rojas ChavarryAún no hay calificaciones
- Cambio de Embrague en Seco y Campana.Documento24 páginasCambio de Embrague en Seco y Campana.Marcos Iglesias0% (1)
- Ejercicios Resueltos VHDL2006Documento13 páginasEjercicios Resueltos VHDL2006Ale KeyAún no hay calificaciones
- Generalidades de La MaderaDocumento55 páginasGeneralidades de La MaderaRoberto Carlos Cornejo PalominoAún no hay calificaciones
- Tipos y Características de Las ArmadurasDocumento9 páginasTipos y Características de Las Armadurassamir0504Aún no hay calificaciones
- Catalogo Interiorismo 2020 - DIGITALDocumento324 páginasCatalogo Interiorismo 2020 - DIGITALEdgarMorenoAún no hay calificaciones
- Funciones y Responsabilidades Del Personal Del Laboratorio de MetrologiaDocumento3 páginasFunciones y Responsabilidades Del Personal Del Laboratorio de Metrologiacastmatamoros30% (10)
- Entendiendo Expresiones Lambda en C#Documento6 páginasEntendiendo Expresiones Lambda en C#Martin MarquezAún no hay calificaciones
- Folleto de Flujo Gradualmente Variado FGVDocumento22 páginasFolleto de Flujo Gradualmente Variado FGVJorge PerezAún no hay calificaciones
- Semana 2 Diseño Acero y MaderaDocumento10 páginasSemana 2 Diseño Acero y MaderaHamiltón Ayala AramburúAún no hay calificaciones
- Lista de Precios Fijos Convocatorias SRPA-Rev1Documento1052 páginasLista de Precios Fijos Convocatorias SRPA-Rev1Ligia MedinaAún no hay calificaciones