También podría gustarte
- Sistemas Resorte Masa Movimiento Libre No AmortiguadoDocumento15 páginasSistemas Resorte Masa Movimiento Libre No AmortiguadoJonathan Torres100% (2)
- Dinamica CDocumento7 páginasDinamica CJuan MiguelAún no hay calificaciones
- Dinamica EjerciciosDocumento67 páginasDinamica EjerciciosBetterWolf777100% (1)
- Experimento 3Documento5 páginasExperimento 3Laura Rojas BeltranAún no hay calificaciones
- Act1 LagrangeDocumento5 páginasAct1 Lagrangea01750470Aún no hay calificaciones
- Principio de D AlembertDocumento6 páginasPrincipio de D AlembertJorge Andres Pavón50% (2)
- Cinética de PartículasDocumento20 páginasCinética de Partículasfgs1511100% (1)
- Principio D AlambertDocumento5 páginasPrincipio D AlambertCarlos CorreaAún no hay calificaciones
- Ejemplo Diferencia Entre ModelosDocumento6 páginasEjemplo Diferencia Entre ModelosLuisa Orozco LoteroAún no hay calificaciones
- Apunte 015Documento6 páginasApunte 015Oswaldo GalvezAún no hay calificaciones
- Principio de D LambertDocumento5 páginasPrincipio de D LambertJoel GuevaraAún no hay calificaciones
- Modelado Estructural para Sistemas Mecatrónicos: Bond GraphDocumento17 páginasModelado Estructural para Sistemas Mecatrónicos: Bond GraphDanielAún no hay calificaciones
- Transcripción de Rotación MatlabDocumento19 páginasTranscripción de Rotación MatlabVerenisse Mishel CalleAún no hay calificaciones
- Semana #07 Trabajo y Energia de Un Sistema de ParticulasDocumento37 páginasSemana #07 Trabajo y Energia de Un Sistema de ParticulasCesar Bendrell AlzamoraAún no hay calificaciones
- Tema Iv, Metodo de La Energia en Movimiento de Cuerpo RigidoDocumento27 páginasTema Iv, Metodo de La Energia en Movimiento de Cuerpo RigidoEisenhower Chaljub100% (3)
- Principio de D AlembertDocumento17 páginasPrincipio de D AlembertAndrea MondayAún no hay calificaciones
- Aplicaciones de La Leyes de Newton 1Documento35 páginasAplicaciones de La Leyes de Newton 1Daniel Fernando Romero CamargoAún no hay calificaciones
- Dinamica Del Cuerpo Rigido - Los FierasDocumento24 páginasDinamica Del Cuerpo Rigido - Los FierasBrigith HilarioAún no hay calificaciones
- Movimiento Amortiguado PDFDocumento6 páginasMovimiento Amortiguado PDFEmerson Neri TraslaviñaAún no hay calificaciones
- Soluciones Numéricas y AnalíticasDocumento4 páginasSoluciones Numéricas y AnalíticascarloscaladeAún no hay calificaciones
- Jordan Tineo Evangelista SismicaDocumento9 páginasJordan Tineo Evangelista SismicaHenryPeñalozaRicapaAún no hay calificaciones
- Semana #06 - Impulso y Cantidad de MovimientoDocumento22 páginasSemana #06 - Impulso y Cantidad de MovimientoCesar Bendrell AlzamoraAún no hay calificaciones
- Dinamica EjerciciosDocumento67 páginasDinamica EjerciciosUstariz Heredia Diego Armando100% (1)
- Modelado y Simulación Sistema Masa Resorte AmortiguadoDocumento4 páginasModelado y Simulación Sistema Masa Resorte AmortiguadoKaren Scarlett Garcia Reyes0% (1)
- Principio D'AlembertDocumento3 páginasPrincipio D'AlembertSantiago SolorzanoAún no hay calificaciones
- Maquina AtwoodDocumento5 páginasMaquina AtwoodYuliana PosadaAún no hay calificaciones
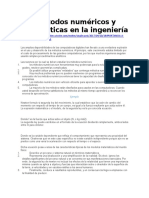
- Los Métodos Numéricos y Las Prácticas en La IngenieríaDocumento3 páginasLos Métodos Numéricos y Las Prácticas en La IngenieríaRedes Computadores Sena TunjaAún no hay calificaciones
- Modelación Matemática y Metodos Núméricos FredDocumento17 páginasModelación Matemática y Metodos Núméricos FredCarlos GomezAún no hay calificaciones
- Principio D'alembertDocumento2 páginasPrincipio D'alembertRody MartinezAún no hay calificaciones
- 2 Ap Newton1011Documento9 páginas2 Ap Newton1011xbxbxbxAún no hay calificaciones
- Nahuatlato Fisica1 TareaDocumento5 páginasNahuatlato Fisica1 TareaLuisAún no hay calificaciones
- Modelo Dinámico de Un Sistema Masa-ResorteDocumento12 páginasModelo Dinámico de Un Sistema Masa-ResorteBrian HuizarAún no hay calificaciones
- Dinamica Unidad 5 Impulso y Cantidad de MovimientoDocumento26 páginasDinamica Unidad 5 Impulso y Cantidad de MovimientoJesus Andres Chay RodriguezAún no hay calificaciones
- Segunda Ley de NewtonDocumento5 páginasSegunda Ley de NewtonDaniel ValderramaAún no hay calificaciones
- Ejemplo Cálculo Numerico Integral de Duhamel Con Matlab - Carrillo LimaDocumento8 páginasEjemplo Cálculo Numerico Integral de Duhamel Con Matlab - Carrillo Limaj-balderasAún no hay calificaciones
- Movimiento Armónico ForzadoDocumento10 páginasMovimiento Armónico ForzadoLoRe VidalAún no hay calificaciones
- Unidad IIDocumento5 páginasUnidad IIEliezer GomezAún no hay calificaciones
- Aplicacion de ED de Orden SuperionDocumento28 páginasAplicacion de ED de Orden SuperionStalyn PilamungaAún no hay calificaciones
- Teorica III. Tema 2. Conservación Del Campo EMDocumento21 páginasTeorica III. Tema 2. Conservación Del Campo EMsam aya mamAún no hay calificaciones
- Resumen Cap 1Documento5 páginasResumen Cap 1jonathan joaquinAún no hay calificaciones
- Dinamica 2Documento4 páginasDinamica 2mararafaAún no hay calificaciones
- Sistemas de 1 GLDocumento9 páginasSistemas de 1 GLViicky Ortiz MtzAún no hay calificaciones
- Concepto de Potencia Media e InstantáneaDocumento7 páginasConcepto de Potencia Media e InstantáneaKleber Paredes100% (1)
- Modelos MatemáticosDocumento3 páginasModelos Matemáticosomarnoguez.javierAún no hay calificaciones
- Segunda Ley de Movimiento de NewtonDocumento15 páginasSegunda Ley de Movimiento de NewtonSthalin Carranza DiazAún no hay calificaciones
- Informe 7 Ley de HookeDocumento6 páginasInforme 7 Ley de HookeKarenJaramilloGalanAún no hay calificaciones
- Movimiento Vibratorio AmortiguadoDocumento6 páginasMovimiento Vibratorio AmortiguadoEsneAún no hay calificaciones
- Movimiento Vibratorio AmortiguadoDocumento6 páginasMovimiento Vibratorio AmortiguadoEsneAún no hay calificaciones
- Propiedades Elásticas de Los MaterialesDocumento11 páginasPropiedades Elásticas de Los MaterialesCarlos Piña100% (1)
- Ejemplo de Calculo Numerico de La Integral de Duhamel Con MatlabDocumento8 páginasEjemplo de Calculo Numerico de La Integral de Duhamel Con MatlabRolandAvilaJulcaAún no hay calificaciones
- METODO DE RAYLEIGH (Autoguardado)Documento9 páginasMETODO DE RAYLEIGH (Autoguardado)Marco Anthony Pinto VAún no hay calificaciones
- Informe RayleighDocumento6 páginasInforme RayleighJhanCarlo Cachuán DávilaAún no hay calificaciones
- Oscilador AmortiguadoDocumento6 páginasOscilador Amortiguadommartin_745550Aún no hay calificaciones
- Ejercicios de Integrales y Ecuaciones Integrales-DiferencialesDe EverandEjercicios de Integrales y Ecuaciones Integrales-DiferencialesAún no hay calificaciones
- Superficies CuadráticasDocumento3 páginasSuperficies CuadráticasArly HerreraAún no hay calificaciones
- Curva PlanaDocumento2 páginasCurva PlanaArly HerreraAún no hay calificaciones
- Empresas Socialmente ResponsablesDocumento20 páginasEmpresas Socialmente ResponsablesArly HerreraAún no hay calificaciones
- Termoeléctrica NuclearDocumento8 páginasTermoeléctrica NuclearArly HerreraAún no hay calificaciones
- NORMATIVIDAD Equipo4Documento11 páginasNORMATIVIDAD Equipo4Arly HerreraAún no hay calificaciones
- Sostenimiento y Revestimiento de TunelesDocumento153 páginasSostenimiento y Revestimiento de TunelesJuan David Rondinel Buleje0% (1)
- Esfuerzo en Una Masa de SueloDocumento44 páginasEsfuerzo en Una Masa de SueloDiego Leandro Olivares Jorge83% (12)
- Emulsificantes ExposiciónDocumento13 páginasEmulsificantes ExposiciónFrank ChAvezAún no hay calificaciones
- Instrumentos de Estación MeteorológicaDocumento3 páginasInstrumentos de Estación MeteorológicaJos LopAún no hay calificaciones
- Informe 7 Lab QuimicaDocumento6 páginasInforme 7 Lab QuimicaJULIAN ESTEBAN ALONSO MURCIAAún no hay calificaciones
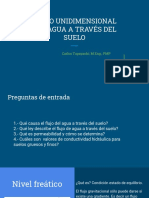
- Flujo Unidimensional Del Agua A Través Del SueloDocumento35 páginasFlujo Unidimensional Del Agua A Través Del Sueloj.rudy cabezasAún no hay calificaciones
- Diseño Del Condensador de Una Central Eléctrica de Vapor XDDocumento6 páginasDiseño Del Condensador de Una Central Eléctrica de Vapor XDYerson ObregonAún no hay calificaciones
- CYPECAD MEP - Ejemplo de CalefacciónDocumento28 páginasCYPECAD MEP - Ejemplo de Calefacciónsalva_snakeAún no hay calificaciones
- Cuál Es La Fórmula Condensada Del Agua y Como Funciona El Puente de Hidrogeno en Esta MoléculaDocumento7 páginasCuál Es La Fórmula Condensada Del Agua y Como Funciona El Puente de Hidrogeno en Esta MoléculaLuis Fernando Solis MartinezAún no hay calificaciones
- Proyecto Final PemexDocumento70 páginasProyecto Final PemexGus De LizardiAún no hay calificaciones
- Inyección de Sellante A Válvula Bajo PresiónDocumento9 páginasInyección de Sellante A Válvula Bajo PresiónANDRES OLANAún no hay calificaciones
- Concepto de TemperaturaDocumento6 páginasConcepto de TemperaturaGabriel Caceres ArauzAún no hay calificaciones
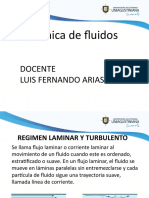
- Régimen Laminar y TurbulentoDocumento13 páginasRégimen Laminar y TurbulentoCristian Stiven Jimenez RativaAún no hay calificaciones
- Operaciones Unitarias QuimicasDocumento12 páginasOperaciones Unitarias QuimicasDaniela GuzmanAún no hay calificaciones
- 1er REC 2do Parcial 2020Documento2 páginas1er REC 2do Parcial 2020Gonzalo LunaAún no hay calificaciones
- Manual Servicio Electrolux MT 4511Documento43 páginasManual Servicio Electrolux MT 4511Cristian Eduardo Cuba GuzmanAún no hay calificaciones
- Clase 1Documento54 páginasClase 1Naida RamosAún no hay calificaciones
- Mecanica Fluidos Guia 4Documento9 páginasMecanica Fluidos Guia 4JHONNYS ALFONSO MANJARREZ GUTIERREZAún no hay calificaciones
- Ciclo Termico de La SoldaduraDocumento5 páginasCiclo Termico de La SoldaduraNaty SilvaAún no hay calificaciones
- Informe Laboratorio FisicaDocumento7 páginasInforme Laboratorio FisicaMaria Paula Peña MartinezAún no hay calificaciones
- ELECTROMAGNETISMO Fisica II ING Recursos NatDocumento117 páginasELECTROMAGNETISMO Fisica II ING Recursos NatEstefany GonzalezAún no hay calificaciones
- II - S - 2022 - RRF - Laboratorio de Química Orgánica General I - 001 002 003 004 005Documento4 páginasII - S - 2022 - RRF - Laboratorio de Química Orgánica General I - 001 002 003 004 005Roiner NaranjoAún no hay calificaciones
- Elementos Finitos Trabajo FinalDocumento12 páginasElementos Finitos Trabajo FinalDanny FernandezAún no hay calificaciones
- PrismaDocumento7 páginasPrismaLorenzo MontzonAún no hay calificaciones
- Eaton-Catálogo-Transformadores de DistribuciónDocumento32 páginasEaton-Catálogo-Transformadores de DistribuciónKike BgdAún no hay calificaciones
- Teórico 12 - Acero - DimensionadoDocumento26 páginasTeórico 12 - Acero - DimensionadoFlorencia Gerbaldo100% (1)
- ESTRUCTURACIONDocumento4 páginasESTRUCTURACIONJose Ayala QuispeAún no hay calificaciones
- Reporte Del Lab. 1Documento11 páginasReporte Del Lab. 1Aarón UlloaAún no hay calificaciones
- Naniegub - Taller 1, Mecánica de Fluidos D1Documento2 páginasNaniegub - Taller 1, Mecánica de Fluidos D1Juan Daniel Parra ChavesAún no hay calificaciones