También podría gustarte
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Triptico de La EnergiaDocumento2 páginasTriptico de La Energiaangie vidaurre ojeda100% (2)
- Subestaciones de DistribuciónDocumento27 páginasSubestaciones de DistribuciónRA GilmerAún no hay calificaciones
- Ejercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiDe EverandEjercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiCalificación: 5 de 5 estrellas5/5 (1)
- Ejercicios ArduinoDocumento11 páginasEjercicios Arduinoolaff jardinez morenoAún no hay calificaciones
- SERVOMOTORESDocumento6 páginasSERVOMOTORESFelix OjedaAún no hay calificaciones
- Servomotor Con Arduino Tutorial de Programación Paso A PasoDocumento5 páginasServomotor Con Arduino Tutorial de Programación Paso A PasoDaniel Villarroel MontañoAún no hay calificaciones
- Servo MotorDocumento15 páginasServo MotorLasky ParzivalAún no hay calificaciones
- SERVOMOTORESDocumento6 páginasSERVOMOTORESFelix OjedaAún no hay calificaciones
- Copia de for-SSO-064 PETAR Bloqueo y EtiquetadoDocumento10 páginasCopia de for-SSO-064 PETAR Bloqueo y EtiquetadoDavid GomezAún no hay calificaciones
- ServomotorDocumento9 páginasServomotoredgar_meca1000Aún no hay calificaciones
- LAB 2 Arduino PDFDocumento6 páginasLAB 2 Arduino PDFMarco Antonio Yupanqui LimachiAún no hay calificaciones
- El Hidrógeno y La Energía (2007)Documento185 páginasEl Hidrógeno y La Energía (2007)ogarateAún no hay calificaciones
- Servomotor Con Arduino TutorialDocumento5 páginasServomotor Con Arduino TutorialRamiro100% (1)
- ServomotoresDocumento13 páginasServomotoresMaster SistemasAún no hay calificaciones
- Servo Motor Electrico Sg90Documento11 páginasServo Motor Electrico Sg90cehebaAún no hay calificaciones
- Servomotores Con ArduinoDocumento8 páginasServomotores Con ArduinoCavallin CarlosAún no hay calificaciones
- Servomotor SG 1050Documento5 páginasServomotor SG 1050Khenedy ParicahuaAún no hay calificaciones
- Servomotor TutorialDocumento9 páginasServomotor TutorialDaries DctAún no hay calificaciones
- Controlando Un Servomotor Con Un Pic16f877Documento7 páginasControlando Un Servomotor Con Un Pic16f877Jules AgAún no hay calificaciones
- Control de Servomotor Con Potenciómetro Utilizando El Módulo ESP32Documento4 páginasControl de Servomotor Con Potenciómetro Utilizando El Módulo ESP32Eric Simancas Acevedo100% (1)
- ArduinoDocumento2 páginasArduinoUlises RodriguezAún no hay calificaciones
- Practica Nro 7Documento5 páginasPractica Nro 7Ronald ContrerasAún no hay calificaciones
- 5-Tutorial SERVO Motor ArduinoDocumento3 páginas5-Tutorial SERVO Motor ArduinoGlenda GomezAún no hay calificaciones
- Servo Con PotDocumento4 páginasServo Con PotAlandelaRosaAún no hay calificaciones
- Controlar Un Servo Con ArduinoDocumento4 páginasControlar Un Servo Con ArduinosugeyAún no hay calificaciones
- Como Progranar Paso A PasoDocumento9 páginasComo Progranar Paso A PasoAle GarzaAún no hay calificaciones
- Data ArduinoDocumento30 páginasData ArduinoA Juan Carlos LópezAún no hay calificaciones
- Controlando Un Servomotor Con Una FotorresistenciaDocumento4 páginasControlando Un Servomotor Con Una Fotorresistenciagotmago67% (3)
- SLC Lab 6Documento6 páginasSLC Lab 6davidvalenAún no hay calificaciones
- Trabajo Práctico ServomotorDocumento8 páginasTrabajo Práctico Servomotorabril.maidAún no hay calificaciones
- Motores ArduinoDocumento15 páginasMotores ArduinofdsferfwfAún no hay calificaciones
- PRACTIC17Documento2 páginasPRACTIC17CRISTIAN ALEXISAún no hay calificaciones
- SERVOMOTORDocumento27 páginasSERVOMOTORbrandonAún no hay calificaciones
- Servo y MCCDocumento14 páginasServo y MCCManuel DaniloAún no hay calificaciones
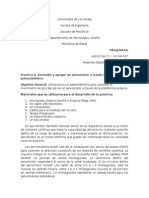
- Practica 6. Encender y Apagar Un Servomotor A Traves de Un PotenciometroDocumento7 páginasPractica 6. Encender y Apagar Un Servomotor A Traves de Un PotenciometroAstrid Carolina Díaz GonzálezAún no hay calificaciones
- Motor Servo SG90Documento2 páginasMotor Servo SG90cafecitouwu20Aún no hay calificaciones
- Servo MotoresDocumento10 páginasServo MotoresJesus Eduardo Reyes SAún no hay calificaciones
- Practica Nro 6Documento7 páginasPractica Nro 6Ronald ContrerasAún no hay calificaciones
- Control de Motores Servos Usando Matlab y Un Pic16f628aDocumento10 páginasControl de Motores Servos Usando Matlab y Un Pic16f628aCristian Moya BejaranoAún no hay calificaciones
- Práctica 13 - Servomotor Controlado Por PotenciómetroDocumento3 páginasPráctica 13 - Servomotor Controlado Por PotenciómetroSebas El Crack silvaAún no hay calificaciones
- Servomotor Con Arduino Tutorial de Programación Paso A PasoDocumento16 páginasServomotor Con Arduino Tutorial de Programación Paso A PasoLuis Angel BravoAún no hay calificaciones
- Practica 7. Cambio de Velocidad de Un Servomotor Sin PotenciometroDocumento5 páginasPractica 7. Cambio de Velocidad de Un Servomotor Sin PotenciometroAstrid Carolina Díaz GonzálezAún no hay calificaciones
- SERVOMOTORDocumento7 páginasSERVOMOTORRogelio MtzAún no hay calificaciones
- PWMDocumento15 páginasPWMSebastian Muñoz RoseroAún no hay calificaciones
- Servomotor. Introducción y EjemplosDocumento3 páginasServomotor. Introducción y EjemplosjbrunobAún no hay calificaciones
- Práctica No 8-CIDI-IDocumento10 páginasPráctica No 8-CIDI-IJuan CarlosAún no hay calificaciones
- Motor Paso A Paso y ServoDocumento10 páginasMotor Paso A Paso y ServoOMAR OLSIM MAMANI COSMEAún no hay calificaciones
- SERVOMOTORESDocumento14 páginasSERVOMOTORESToño UrAún no hay calificaciones
- 11 Aplicacion Del 8051Documento10 páginas11 Aplicacion Del 8051Jaime Alberto Parra PlazasAún no hay calificaciones
- Practica3 ROBOTSDocumento5 páginasPractica3 ROBOTSOmarOscarAún no hay calificaciones
- Control de DirecciónDocumento7 páginasControl de DirecciónAbraham RodriguezAún no hay calificaciones
- Moviendo Un ServomotorDocumento5 páginasMoviendo Un ServomotorLuis Daniel García RamírezAún no hay calificaciones
- Diseño de Un Braso Robotico Con CartonDocumento9 páginasDiseño de Un Braso Robotico Con CartonRommel LoayzaAún no hay calificaciones
- Raspberry Pi LESSON 28Documento4 páginasRaspberry Pi LESSON 28Byron AsquiAún no hay calificaciones
- Control ServomotorDocumento7 páginasControl ServomotorpruebaAún no hay calificaciones
- Proyecto de Laboratorio de Maquinas ElectricasDocumento10 páginasProyecto de Laboratorio de Maquinas ElectricasElba CanalesAún no hay calificaciones
- Guía ServomotoresDocumento3 páginasGuía ServomotoresMarcio Alejandro Gomez ValerianoAún no hay calificaciones
- El ServomotorDocumento8 páginasEl ServomotorRichard BarrantesAún no hay calificaciones
- Puls Out-ServomotoresDocumento2 páginasPuls Out-ServomotoresGisselle Orellana TorresAún no hay calificaciones
- ArduinoDocumento5 páginasArduinolucy0% (1)
- Control de Servomotor Con ArduinoDocumento7 páginasControl de Servomotor Con ArduinoBenjamin AlarconAún no hay calificaciones
- PICC SERVOS X 8Documento8 páginasPICC SERVOS X 8Yovani De JesúsAún no hay calificaciones
- Prácticas Arduino 20 37 58Documento22 páginasPrácticas Arduino 20 37 58beiman1984Aún no hay calificaciones
- Sensor UltrasonidoDocumento7 páginasSensor UltrasonidoBlen Mérida YucatánAún no hay calificaciones
- CriptografiaPHP Equipo6Documento9 páginasCriptografiaPHP Equipo6Blen Mérida YucatánAún no hay calificaciones
- Criptografía en Entornos .NET 1Documento11 páginasCriptografía en Entornos .NET 1Blen Mérida YucatánAún no hay calificaciones
- Modelo EscarabajoDocumento14 páginasModelo EscarabajoBlen Mérida YucatánAún no hay calificaciones
- Modelo EscarabajoDocumento17 páginasModelo EscarabajoBlen Mérida YucatánAún no hay calificaciones
- Central Solar Repartición 20TDocumento1 páginaCentral Solar Repartición 20Twilliam.123Aún no hay calificaciones
- Tarea Fluido Fase 3Documento4 páginasTarea Fluido Fase 3David TiconaAún no hay calificaciones
- Ejemplos y Actividades Tema 3Documento1 páginaEjemplos y Actividades Tema 3pablo ferreiroAún no hay calificaciones
- Fenómenos de Transporte en Gas de Esferas RígidasDocumento5 páginasFenómenos de Transporte en Gas de Esferas RígidasMiguel Angel Condo LopezAún no hay calificaciones
- Laboratorio Virtual 2Documento18 páginasLaboratorio Virtual 2SERRANO QUEVEDO FLAVIA JAHAIRAAún no hay calificaciones
- Emulador A Pequeña Escala de Un SFVR, Bajo La Aplicaci (On de GD para Un Usuario Residencial PDFDocumento149 páginasEmulador A Pequeña Escala de Un SFVR, Bajo La Aplicaci (On de GD para Un Usuario Residencial PDFDavid LiscanoAún no hay calificaciones
- Trabajo Hec-Ras - Diseño HidraulicoDocumento26 páginasTrabajo Hec-Ras - Diseño HidraulicoIzagui Charaja HerenciaAún no hay calificaciones
- PRACTICA - No - 1 GEN - ACDocumento7 páginasPRACTICA - No - 1 GEN - ACjonatanAún no hay calificaciones
- Body Condition Scoring of Dairy Cattle - En.esDocumento8 páginasBody Condition Scoring of Dairy Cattle - En.esPaula Andrea Arango RiverosAún no hay calificaciones
- Plano CasaDocumento1 páginaPlano CasaJUAN SEBASTIAN ARDILA PRADILLAAún no hay calificaciones
- Fisica 1 Laboratorio 4Documento11 páginasFisica 1 Laboratorio 4Jean Pierre Auqui Tovar100% (1)
- Alternador 1Documento4 páginasAlternador 1Joaquin Moliner AguilonAún no hay calificaciones
- 02 Evolución Del Mercado Eléctrico en Chile - 2021Documento43 páginas02 Evolución Del Mercado Eléctrico en Chile - 2021Cristopher AvalosAún no hay calificaciones
- HV-David-RODRIGUÉZ-SUARÉZ - PCCSDocumento4 páginasHV-David-RODRIGUÉZ-SUARÉZ - PCCSconce martinesAún no hay calificaciones
- Ecuaciones de Procesos RadiactivosDocumento4 páginasEcuaciones de Procesos RadiactivosAngel PedrazaAún no hay calificaciones
- Programación Curricular Anual de Tercer Grado de Educación Secundaria 2023Documento9 páginasProgramación Curricular Anual de Tercer Grado de Educación Secundaria 2023jemaAún no hay calificaciones
- Ecologia HumanaDocumento182 páginasEcologia HumanaYeime CondoriAún no hay calificaciones
- Ahorro Energético en El Sistema Eléctrico y Gestion TarifariaDocumento20 páginasAhorro Energético en El Sistema Eléctrico y Gestion TarifariaVelkinPorllesAún no hay calificaciones
- Ingeniería en Energías Renovables - Universidad Tecnológica Del UruguayDocumento16 páginasIngeniería en Energías Renovables - Universidad Tecnológica Del UruguayignaciovillanuevaAún no hay calificaciones
- Tipos de Sistemas de Inyeccion ElectronicaDocumento4 páginasTipos de Sistemas de Inyeccion ElectronicaJafet Escamilla AnzuresAún no hay calificaciones
- Conexion DeltaDocumento27 páginasConexion DeltaSaul FloresAún no hay calificaciones
- Len 5EGB U0 G03 Formativa-1Documento5 páginasLen 5EGB U0 G03 Formativa-1mario mauricio guajardo gonzálezAún no hay calificaciones
- Formulario Fisica 594878 Downloadable 4166981Documento3 páginasFormulario Fisica 594878 Downloadable 4166981Ricardo GonzalezAún no hay calificaciones
- Confiabilidad - SISTEMAS ElectricosDocumento30 páginasConfiabilidad - SISTEMAS ElectricosGerardoAlonsoCastilloRodriguezAún no hay calificaciones
- Parcial 2 (20 %) - Revisión Del IntentoDocumento13 páginasParcial 2 (20 %) - Revisión Del IntentoOswaldo CardozaAún no hay calificaciones