También podría gustarte
- Cinemática de Brazo Manipulador de 2 GDL SalomonDocumento8 páginasCinemática de Brazo Manipulador de 2 GDL Salomonjuanillofc100% (5)
- Aplicación de Cinemática DirectaDocumento12 páginasAplicación de Cinemática DirectaEduardo ArriagaAún no hay calificaciones
- ANGELODocumento28 páginasANGELOPaul CevallosAún no hay calificaciones
- ExoesqueletoDocumento4 páginasExoesqueletoKaren GarzonAún no hay calificaciones
- Cinemática Inversa de RobotsDocumento5 páginasCinemática Inversa de RobotsAcus Xelor Imperium TemporeAún no hay calificaciones
- El Robot ScaraDocumento8 páginasEl Robot ScaraJordan BenítezAún no hay calificaciones
- Deber 3 - Cinemática de Robots IndustrialesDocumento5 páginasDeber 3 - Cinemática de Robots IndustrialesCristian UrrestaAún no hay calificaciones
- Diseno Mecatronico Estudio y Modelamiento Robot KukaDocumento10 páginasDiseno Mecatronico Estudio y Modelamiento Robot Kukadario mendozaAún no hay calificaciones
- Tarea 3Documento8 páginasTarea 3Joseph AlmonteAún no hay calificaciones
- InformeDocumento18 páginasInformePaola Maribel GuamanAún no hay calificaciones
- Funciones Comandos en MatlabDocumento11 páginasFunciones Comandos en MatlabwilmarfuerteAún no hay calificaciones
- Mod 2Documento10 páginasMod 2IlseZamoraAún no hay calificaciones
- Cinemática Inversa (Definición, Ejemplo y Conclusiones)Documento5 páginasCinemática Inversa (Definición, Ejemplo y Conclusiones)Ninfa PérezAún no hay calificaciones
- Fase3 FernandoLopezDocumento6 páginasFase3 FernandoLopezJader PerezAún no hay calificaciones
- 9 Trabajo2Documento15 páginas9 Trabajo2Kelly Arrazola SalasAún no hay calificaciones
- Taller CoordenadasDocumento14 páginasTaller Coordenadasfaber antonio carreño Hernandez69% (26)
- Robotica MatlabDocumento6 páginasRobotica MatlabGuillermo OsunaAún no hay calificaciones
- Funciones Comandos en MatlabDocumento11 páginasFunciones Comandos en Matlabjohnelectronica50% (2)
- Calculo II Práctica 5 Fx9860GDocumento24 páginasCalculo II Práctica 5 Fx9860GMiguel Garcia MangaAún no hay calificaciones
- 1er Parcial 2do Taller PDFDocumento2 páginas1er Parcial 2do Taller PDFCristian Bravo MartinezAún no hay calificaciones
- TareaN1 SistemasBiologicos RoboticaBioInspiradaDocumento9 páginasTareaN1 SistemasBiologicos RoboticaBioInspiradaAland BravoAún no hay calificaciones
- Análisis de Un Brazo Robótico Con Tres Grados de LibertadDocumento37 páginasAnálisis de Un Brazo Robótico Con Tres Grados de LibertadMax UhleAún no hay calificaciones
- Configuraciones SingularesDocumento6 páginasConfiguraciones SingularesMiguelAngelJaureguiAún no hay calificaciones
- Evaluación Tercer Parcial Ing TomasDocumento16 páginasEvaluación Tercer Parcial Ing TomasAbel Nohpal BrionesAún no hay calificaciones
- Actividades Integradoras y Autoevaluación Actividades Integradores 1Documento2 páginasActividades Integradoras y Autoevaluación Actividades Integradores 1maria perezAún no hay calificaciones
- 146 LedierBustos Tarea1Documento13 páginas146 LedierBustos Tarea1Leidy Camila Contreras GarciaAún no hay calificaciones
- Modelo Dinamico 2Documento9 páginasModelo Dinamico 2Osmar De La CruzAún no hay calificaciones
- 02 Cinemática Directa e Inversa.Documento10 páginas02 Cinemática Directa e Inversa.sistemaelectricoAún no hay calificaciones
- Superficies ParametrizadasDocumento8 páginasSuperficies ParametrizadasBryam BryamAún no hay calificaciones
- Robot Cilindrico R - Practica1Documento6 páginasRobot Cilindrico R - Practica1Carlos FuentesAún no hay calificaciones
- Gráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraDe EverandGráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraAún no hay calificaciones
- MECANI 1 WolframDocumento18 páginasMECANI 1 WolframStephen JimboAún no hay calificaciones
- Act 3 CinedirDocumento11 páginasAct 3 CinedirAlberto GARCIAAún no hay calificaciones
- Actividad Fundamental 1Documento10 páginasActividad Fundamental 1Alberto GARCIAAún no hay calificaciones
- Robtic. IndustrialDocumento9 páginasRobtic. IndustrialMARLON EFRAIN LLAMBA LEMAAún no hay calificaciones
- Análisis de Manipulabilidad de Manipuladores RedundantesDocumento9 páginasAnálisis de Manipulabilidad de Manipuladores RedundantesLudwig BeethovenAún no hay calificaciones
- Funciones TrigonometricasDocumento14 páginasFunciones Trigonometricaschurypizarro2367Aún no hay calificaciones
- TareaN4 RoboticaAplicadaDocumento7 páginasTareaN4 RoboticaAplicadaAland BravoAún no hay calificaciones
- Brazo Robotico de 5 GLDDocumento15 páginasBrazo Robotico de 5 GLDWALTER MAX MONTAÑO CAMACHOAún no hay calificaciones
- Deber - 1 Teoria de CoordenadasDocumento7 páginasDeber - 1 Teoria de CoordenadasJORGE CASTILLOAún no hay calificaciones
- Práctica 6 - Daniel Sánchez Pérez LaraDocumento11 páginasPráctica 6 - Daniel Sánchez Pérez LaraAna Pau OlveraAún no hay calificaciones
- Informe 8Documento15 páginasInforme 8Cobalt DevilAún no hay calificaciones
- Informe 5 - Arias Vargas Karen Rivera Duenas Jose y Zevallos Zegarra RocioDocumento28 páginasInforme 5 - Arias Vargas Karen Rivera Duenas Jose y Zevallos Zegarra RocioJose OlazabalAún no hay calificaciones
- Implementación de Simulink en Un Robot Paralelo - RobóticaDocumento26 páginasImplementación de Simulink en Un Robot Paralelo - RobóticaAdrian RicardezAún no hay calificaciones
- Algoritmo BresenhamDocumento7 páginasAlgoritmo BresenhamMahurem0% (1)
- Funciones TrigonométricasDocumento16 páginasFunciones Trigonométricaschurypizarro2367Aún no hay calificaciones
- P4 LabCM B217 EquipoFGGMRDocumento7 páginasP4 LabCM B217 EquipoFGGMRMau GHAún no hay calificaciones
- Algoritmo para Generar Formulas de Características Geométricas de Las Secciones PlanasDocumento11 páginasAlgoritmo para Generar Formulas de Características Geométricas de Las Secciones PlanasRgc Ingeniería CivilAún no hay calificaciones
- Practica 4 Control ModernoDocumento7 páginasPractica 4 Control ModernojesusAún no hay calificaciones
- Actividad 4 Calculo Vectorial - Equipo 9Documento22 páginasActividad 4 Calculo Vectorial - Equipo 9azradenll4Aún no hay calificaciones
- Area Entre Dos Curvas Con Matlab PDFDocumento7 páginasArea Entre Dos Curvas Con Matlab PDFMiller Palacio NuñezAún no hay calificaciones
- Desarrollo de Sistemas Dinámicos Animados en MatlabDocumento8 páginasDesarrollo de Sistemas Dinámicos Animados en MatlabDanielOlmedoNavarreteAún no hay calificaciones
- Práctica 2. Ecuaciones Paramétricas y Coordenadas Polares 2Documento10 páginasPráctica 2. Ecuaciones Paramétricas y Coordenadas Polares 2Brandom Monroy CarbajalAún no hay calificaciones
- Aplicacion de Matrices de TransformacionDocumento6 páginasAplicacion de Matrices de TransformacionEDISSON ALFREDO GUTIERREZ OPPEAún no hay calificaciones
- 5.taller Conjunto Cal Vectorial 2018-2Documento11 páginas5.taller Conjunto Cal Vectorial 2018-2Hamilton Stheven Silva AmadoAún no hay calificaciones
- Modelado y renderizado basado en imágenes: Explorando el realismo visual: técnicas en visión por computadoraDe EverandModelado y renderizado basado en imágenes: Explorando el realismo visual: técnicas en visión por computadoraAún no hay calificaciones
- Algoritmo de la línea de Bresenham: Representación eficiente de líneas con píxeles perfectos para visión por computadoraDe EverandAlgoritmo de la línea de Bresenham: Representación eficiente de líneas con píxeles perfectos para visión por computadoraAún no hay calificaciones
- Modelo de cámara estenopeica: Comprender la perspectiva a través de la óptica computacionalDe EverandModelo de cámara estenopeica: Comprender la perspectiva a través de la óptica computacionalAún no hay calificaciones
- Introducción a la geometría analíticaDe EverandIntroducción a la geometría analíticaCalificación: 4 de 5 estrellas4/5 (1)
- Robótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsDe EverandRobótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsAún no hay calificaciones
- Entorno Regulatorio - 1723100Documento6 páginasEntorno Regulatorio - 1723100Cindy GonzálezAún no hay calificaciones
- Tarea Términos Entorno Regulatorio 2023Documento2 páginasTarea Términos Entorno Regulatorio 2023Cindy GonzálezAún no hay calificaciones
- Id Normas - 1723100Documento4 páginasId Normas - 1723100Cindy GonzálezAún no hay calificaciones
- PIA TelemedicinaDocumento34 páginasPIA TelemedicinaCindy GonzálezAún no hay calificaciones
- Actividad 1. Lesiones de EspaldaDocumento4 páginasActividad 1. Lesiones de EspaldaCindy GonzálezAún no hay calificaciones
- Actividad Fundamental 6-1723100Documento9 páginasActividad Fundamental 6-1723100Cindy GonzálezAún no hay calificaciones
- Francia y El Sistema Métrico-1723100Documento4 páginasFrancia y El Sistema Métrico-1723100Cindy GonzálezAún no hay calificaciones
- El Juego Como Recurso Didactico para La Ensenanza de Las MatematicasDocumento52 páginasEl Juego Como Recurso Didactico para La Ensenanza de Las Matematicasnubia pinedaAún no hay calificaciones
- Delito de SicariatoDocumento26 páginasDelito de SicariatoDeiby SilupuAún no hay calificaciones
- Lab. Fisica 2Documento11 páginasLab. Fisica 2WILMAN AULLA CARDENASAún no hay calificaciones
- Examen GeografiaDocumento31 páginasExamen Geografialeidy valadezAún no hay calificaciones
- Proyecciones Lamina IlustrativaDocumento146 páginasProyecciones Lamina IlustrativaJOSE MARTIN VALENCIA TAYMESAún no hay calificaciones
- Informe de GestiónDocumento11 páginasInforme de Gestiónlycaon.gaurhothAún no hay calificaciones
- 10 Normas de Laboratorio - BiologiaDocumento1 página10 Normas de Laboratorio - BiologiaLauraChaupis88% (8)
- 6 Tubo FluorescenteDocumento9 páginas6 Tubo Fluorescentepepeluan2023Aún no hay calificaciones
- Tarea 1 - Unidad 2-OficialDocumento23 páginasTarea 1 - Unidad 2-OficialNinive santiago vidalAún no hay calificaciones
- Trabajar ContabilidadDocumento33 páginasTrabajar ContabilidadMICHAEL CERVANTESAún no hay calificaciones
- Capitulo 4 Motivacion Del ConsumidorDocumento34 páginasCapitulo 4 Motivacion Del ConsumidorCarlos GirónAún no hay calificaciones
- Onda 2Documento6 páginasOnda 2Valeria Gabaldon JuarezAún no hay calificaciones
- Medio Social y Natural, Primero PrimariaDocumento14 páginasMedio Social y Natural, Primero PrimariaGabby Funes de SchawAún no hay calificaciones
- Paleta Vegetal Plantas Nativas de TijuanaDocumento246 páginasPaleta Vegetal Plantas Nativas de TijuanainktankAún no hay calificaciones
- Qué Son Los Valores HumanosDocumento2 páginasQué Son Los Valores HumanosVictor MonterreyAún no hay calificaciones
- PEP 1 - Estática y Cinemática de Máquinas (2014-1)Documento5 páginasPEP 1 - Estática y Cinemática de Máquinas (2014-1)Rodrigo Rivera CaceresAún no hay calificaciones
- Uso de La Calculadora HP 50gDocumento5 páginasUso de La Calculadora HP 50gJorge Arrascue50% (2)
- Cartel de Contenidos CcssDocumento3 páginasCartel de Contenidos CcssLester Salinas OrdoñezAún no hay calificaciones
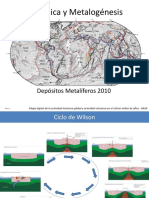
- Tectónica y MetalogénesisDocumento65 páginasTectónica y MetalogénesisJuan Pablo Alvarado RiquelmeAún no hay calificaciones
- Memoria Electrica MalinalcoDocumento16 páginasMemoria Electrica MalinalcoMarco SanchezAún no hay calificaciones
- Pca de Educacion FisicaDocumento11 páginasPca de Educacion FisicaJovita UvijindiaAún no hay calificaciones
- Pautas para La Elaboración de Informes de Laboratorio de QuímicaDocumento10 páginasPautas para La Elaboración de Informes de Laboratorio de QuímicaM. Fernanda FiquitivaAún no hay calificaciones
- Qué Significa Soñar Con BulimiaDocumento2 páginasQué Significa Soñar Con BulimiaInterpretación de los sueñosAún no hay calificaciones
- Desarrollo Sustentable Fuentes de ContaminacionDocumento6 páginasDesarrollo Sustentable Fuentes de ContaminacionNicolás MéndezAún no hay calificaciones
- Lesión Del Manguito RotadorDocumento7 páginasLesión Del Manguito RotadorCarmen F. LanzaAún no hay calificaciones
- La Invencion Del Aula-ResumenDocumento8 páginasLa Invencion Del Aula-ResumenAyelén CórdobaAún no hay calificaciones
- Practica Mínimos Cuadrados Lineal y CuadraticaDocumento4 páginasPractica Mínimos Cuadrados Lineal y CuadraticaRoy MendozaAún no hay calificaciones
- Guia 2019Documento217 páginasGuia 2019LUIS ALBERTOAún no hay calificaciones
- Resumen 1 - Etica GeneralDocumento2 páginasResumen 1 - Etica GeneralJonas GrullonAún no hay calificaciones
- Taller - Fundamentos y Vocabulario de Sistemas de GestiónDocumento5 páginasTaller - Fundamentos y Vocabulario de Sistemas de GestiónGissela GarciaAún no hay calificaciones