También podría gustarte
- Semana 1 Simulacion de Sistemas Introduccion 2020 01Documento45 páginasSemana 1 Simulacion de Sistemas Introduccion 2020 01StevenRoldanAún no hay calificaciones
- TC1 Clase1Documento5 páginasTC1 Clase1jowarAún no hay calificaciones
- Clase 1 Introducción ElectrónicaDocumento54 páginasClase 1 Introducción ElectrónicaEddyAún no hay calificaciones
- 01a SIMULACION de SISTEMAS Introduccion 2020 01 Primera SemanaDocumento45 páginas01a SIMULACION de SISTEMAS Introduccion 2020 01 Primera Semanaluispename1Aún no hay calificaciones
- 01a SIMULACION de SISTEMAS Introduccion 2020 01 Primera SemanaDocumento45 páginas01a SIMULACION de SISTEMAS Introduccion 2020 01 Primera SemanamiladyAún no hay calificaciones
- T01-T02-Tipos de Sistemas de Regulación y Métodos de ControlDocumento60 páginasT01-T02-Tipos de Sistemas de Regulación y Métodos de Controllucia lopez lopezAún no hay calificaciones
- 00 - Manual de Practicas 1er ParcialDocumento19 páginas00 - Manual de Practicas 1er ParcialMiguel ChavezAún no hay calificaciones
- 00 Contexto de La Ingeniería de ControlDocumento9 páginas00 Contexto de La Ingeniería de ControlW JULIO DÁVALOS DIAZAún no hay calificaciones
- Modelado de Sistemas DinámicosDocumento44 páginasModelado de Sistemas DinámicosJUAN4201Aún no hay calificaciones
- PiaDocumento7 páginasPiaIgnacio FariasAún no hay calificaciones
- Guia Analisis Sistemas GabrielaOrtizDocumento194 páginasGuia Analisis Sistemas GabrielaOrtizRuth Campos ArtaviaAún no hay calificaciones
- Silabus de Sistemas Dinamicos PERUDocumento5 páginasSilabus de Sistemas Dinamicos PERUJoel Jonathan AlvarezAún no hay calificaciones
- Introduccion 21aDocumento21 páginasIntroduccion 21aFaustoPolancoAriasAún no hay calificaciones
- Clase III Principios de ControlDocumento19 páginasClase III Principios de ControlJose OteroAún no hay calificaciones
- Informe Proyecto Control 2 V1.0Documento18 páginasInforme Proyecto Control 2 V1.0Andrés RamírezAún no hay calificaciones
- Contenido Del CursoDocumento4 páginasContenido Del CursoFranciscoJavierUrietaGarcíaAún no hay calificaciones
- Expo. Cap. 10Documento46 páginasExpo. Cap. 10Jorge Aguiar TiradoAún no hay calificaciones
- Silabos Comp Ml611-2020-I PDFDocumento8 páginasSilabos Comp Ml611-2020-I PDFBrajan Chumpitaz SeguraAún no hay calificaciones
- Modelado e Identificación C1Documento41 páginasModelado e Identificación C1julianAún no hay calificaciones
- Dinámica de Sistemas FísicosDocumento3 páginasDinámica de Sistemas FísicosJuanito perez bananaAún no hay calificaciones
- Modelacion 22aDocumento81 páginasModelacion 22aJesica QuingaAún no hay calificaciones
- Trabajo 3 Pedro David Pesántez PDFDocumento3 páginasTrabajo 3 Pedro David Pesántez PDFPEDRO DAVID PESANTEZ PESANTEZAún no hay calificaciones
- Clase - 1 - Presentación IntroducciónLaplaceDocumento31 páginasClase - 1 - Presentación IntroducciónLaplacelola guadalupe medina alarconAún no hay calificaciones
- Presentación: Pcinemar@upc - Edu.peDocumento47 páginasPresentación: Pcinemar@upc - Edu.peruth capcha muñizAún no hay calificaciones
- Estimacion de Parametros CISCI - 2009Documento6 páginasEstimacion de Parametros CISCI - 2009ilcastilloAún no hay calificaciones
- Mode IODocumento11 páginasMode IOBrayan AriasAún no hay calificaciones
- Análisis de Sistemas RealimentadosDocumento21 páginasAnálisis de Sistemas Realimentadosroberto roblesAún no hay calificaciones
- Rau T1Documento82 páginasRau T1xarola342Aún no hay calificaciones
- 01a SIMULACION DE SISTEMAS Introducción Rafael Ortiz PDFDocumento63 páginas01a SIMULACION DE SISTEMAS Introducción Rafael Ortiz PDFRafael Vega castillaAún no hay calificaciones
- Modelado de Sistemas DinamicosDocumento44 páginasModelado de Sistemas DinamicosJUAN4201Aún no hay calificaciones
- Modelado de Sistemas DinamicosDocumento30 páginasModelado de Sistemas DinamicossoniaAún no hay calificaciones
- Lec2 Introducción A La Teoría de Control AutomáticaDocumento38 páginasLec2 Introducción A La Teoría de Control AutomáticaXerneo -SamaAún no hay calificaciones
- Silabo Sistemas de Control - 2021 - BDocumento8 páginasSilabo Sistemas de Control - 2021 - BsebastianAún no hay calificaciones
- PLAN DE TRABAJO Control IIDocumento6 páginasPLAN DE TRABAJO Control IIWilmer OscoAún no hay calificaciones
- 01a SIMULACION DE SISTEMAS Introduccion 2022 02 Primera SemanaDocumento47 páginas01a SIMULACION DE SISTEMAS Introduccion 2022 02 Primera SemanaMaruja Abigail Dominguez SalazarAún no hay calificaciones
- Control de Procesos Industriales Sin TransicionesDocumento81 páginasControl de Procesos Industriales Sin TransicionesMiguel Arocha FuentesAún no hay calificaciones
- Mapa U1 - Elementos - Smeke L. Eduardo E.Documento2 páginasMapa U1 - Elementos - Smeke L. Eduardo E.Eduardo SmekeAún no hay calificaciones
- Programa de La Asignatura Modelaje y Simulación Digital DJAENDocumento3 páginasPrograma de La Asignatura Modelaje y Simulación Digital DJAENRicardo TorresAún no hay calificaciones
- 3 Modelado de Sistemas MecanicosDocumento61 páginas3 Modelado de Sistemas MecanicosAnthony FreireAún no hay calificaciones
- Portafolio Camilo MencoDocumento7 páginasPortafolio Camilo MencoPablo RamirezAún no hay calificaciones
- MECATRONICADocumento6 páginasMECATRONICATeddy Jhennse Negrete PeñaAún no hay calificaciones
- Modelos y FTDocumento65 páginasModelos y FTFrank Edisson Cardenas LimayllaAún no hay calificaciones
- Tema 3 Analisis de Sistemas Realimentados - CompressDocumento18 páginasTema 3 Analisis de Sistemas Realimentados - CompressIng Juan Pablo LermaAún no hay calificaciones
- Análisis de Sistemas LinealesDocumento27 páginasAnálisis de Sistemas LinealesDavid BVAún no hay calificaciones
- U2 - Modelos Matemáticos ImportanciaDocumento9 páginasU2 - Modelos Matemáticos ImportanciaJENNIFER ESTEFANIA SANCHEZ AGUAYOAún no hay calificaciones
- Aircraft Pitch Root Locus Controller Design Cardenas CarrilloDocumento12 páginasAircraft Pitch Root Locus Controller Design Cardenas Carrillojuan carlos100% (1)
- Control I - Ing ElectricaDocumento7 páginasControl I - Ing ElectricaJvr VelascoAún no hay calificaciones
- Silabo - Control AutomaticoDocumento9 páginasSilabo - Control AutomaticoJohn Enrique Tinoco RojasAún no hay calificaciones
- Modelado Sistemas Fisicos PDFDocumento28 páginasModelado Sistemas Fisicos PDFRaymond LabandaAún no hay calificaciones
- Programa Analitico Asignatura 5911C113269-313920Documento6 páginasPrograma Analitico Asignatura 5911C113269-313920Ivan LitumaAún no hay calificaciones
- Dinamica de Sistemas - Ing MecatronicaDocumento9 páginasDinamica de Sistemas - Ing MecatronicaFrodo BolsonAún no hay calificaciones
- Programa Analitico Asignatura 5411158610794-268321Documento6 páginasPrograma Analitico Asignatura 5411158610794-268321pabloAún no hay calificaciones
- AUTOMATIZACION SistemasDocumento145 páginasAUTOMATIZACION Sistemasdaniel enrique peña fuentesAún no hay calificaciones
- Modelado de Sistemas DinámicosDocumento30 páginasModelado de Sistemas DinámicosMar Valencia100% (1)
- Taller de Ceneval IMT-I PDFDocumento28 páginasTaller de Ceneval IMT-I PDFCésar Augusto Martínez AtaydeAún no hay calificaciones
- Tema3 04 11 AlumnosDocumento65 páginasTema3 04 11 AlumnosRuben DaríoAún no hay calificaciones
- Lee RuddDocumento67 páginasLee RuddMaraArenasAún no hay calificaciones
- Mecatrónica: modelado, simulación y control de sistemas físicosDe EverandMecatrónica: modelado, simulación y control de sistemas físicosAún no hay calificaciones
- Sistemas automáticos industriales de eventos discretosDe EverandSistemas automáticos industriales de eventos discretosAún no hay calificaciones
- Gestion WikiDocumento4 páginasGestion WikiSANTIAGO VALADEZAún no hay calificaciones
- Resolución de Problemas Del Flujo de Correo Entrante en Exchange Server 2003Documento4 páginasResolución de Problemas Del Flujo de Correo Entrante en Exchange Server 2003JesúsAún no hay calificaciones
- Problemas Resueltos de Lineas de TransmisionDocumento101 páginasProblemas Resueltos de Lineas de TransmisionmowliwhiteAún no hay calificaciones
- Conversión de Una Expresión Regular en Un AFDDocumento7 páginasConversión de Una Expresión Regular en Un AFDMilton RezeAún no hay calificaciones
- CV. Daniel Esteban Leguizamo P.Documento3 páginasCV. Daniel Esteban Leguizamo P.scantuariasAún no hay calificaciones
- Qué Es Un Modelo DimensionalDocumento6 páginasQué Es Un Modelo DimensionalRubi MedelAún no hay calificaciones
- 1-FORMULARIO UNICO DE LA OFERTA-signed-signedDocumento25 páginas1-FORMULARIO UNICO DE LA OFERTA-signed-signedAlexander LoachaminAún no hay calificaciones
- Cómo Utilizar El PDT PLAMEDocumento10 páginasCómo Utilizar El PDT PLAMElizeth gonzalesdAún no hay calificaciones
- Document 1Documento6 páginasDocument 1Deyvi Osmar Zegarra VillenaAún no hay calificaciones
- MAXQDADocumento10 páginasMAXQDAJeff RoblesAún no hay calificaciones
- Planilla Tarea - Herramientas DigitalesDocumento2 páginasPlanilla Tarea - Herramientas DigitalesFelipe Iturra JaraAún no hay calificaciones
- Semana 6Documento2 páginasSemana 6Diana CaicedoAún no hay calificaciones
- Setup IsbusinessDocumento15 páginasSetup IsbusinessJean SilvaAún no hay calificaciones
- Presaberes - Establecer Los Conocimientos Previos Diego Rubio 208060A - 614Documento7 páginasPresaberes - Establecer Los Conocimientos Previos Diego Rubio 208060A - 614diego rubioAún no hay calificaciones
- La Educación y La Economia Del ConocimientoDocumento21 páginasLa Educación y La Economia Del ConocimientoAngie Aranda Patiño100% (1)
- Infografia Norma Iso 17025Documento2 páginasInfografia Norma Iso 17025OSMAR JOSUE REYES MAURICIO100% (1)
- 02presentación Marypaz TesisDocumento24 páginas02presentación Marypaz TesisLain AsakuraAún no hay calificaciones
- SCR Malla de DisparoDocumento2 páginasSCR Malla de DisparoANDY MIGUEL PANTOJA ATENCIOAún no hay calificaciones
- Actividad 3. MétodosDocumento9 páginasActividad 3. MétodosCarmen Cánova ValladaresAún no hay calificaciones
- Brochure Soporte Anual 1Documento2 páginasBrochure Soporte Anual 1Richard CuencaAún no hay calificaciones
- Escuela Politecnica Nacional Facultad deDocumento608 páginasEscuela Politecnica Nacional Facultad deomar diazAún no hay calificaciones
- BROCHURE Tablets LenovoDocumento2 páginasBROCHURE Tablets Lenovogcaira101211Aún no hay calificaciones
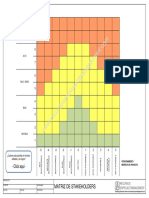
- Matriz - de - Stakeholders PDFDocumento1 páginaMatriz - de - Stakeholders PDFJose Luis Bohorquez LealAún no hay calificaciones
- Evaluacion N2 - Informe - Felipe Morales Moises Carvajal - Seccion 100Documento8 páginasEvaluacion N2 - Informe - Felipe Morales Moises Carvajal - Seccion 100felipeAún no hay calificaciones
- Balanza HB43 - Especificacion PDFDocumento2 páginasBalanza HB43 - Especificacion PDFcristian orihuelaAún no hay calificaciones
- 4 CuestionariosDocumento64 páginas4 Cuestionariosapi-3726975100% (3)
- Appclub 250215Documento11 páginasAppclub 250215Eduardo FernándezAún no hay calificaciones
- Circuitos Electricos I EspeDocumento6 páginasCircuitos Electricos I EspeByron MotocheAún no hay calificaciones
- Manual Mantenimiento de Una LaptopDocumento5 páginasManual Mantenimiento de Una Laptopapi-721847160Aún no hay calificaciones
- Handbook of Music and Emotions: Teoria, Investigacion y AplicacionesDocumento6 páginasHandbook of Music and Emotions: Teoria, Investigacion y Aplicacionesdjletal69Aún no hay calificaciones