También podría gustarte
- Po23ag7 1Documento6 páginasPo23ag7 1Roxi Casti EstraAún no hay calificaciones
- Homografía: Homografía: Transformaciones en Visión por ComputadorDe EverandHomografía: Homografía: Transformaciones en Visión por ComputadorAún no hay calificaciones
- G 8.1 Ár-Reg CuadrDocumento6 páginasG 8.1 Ár-Reg CuadrNueva GeneracionAún no hay calificaciones
- Problemas SuperposicionDocumento10 páginasProblemas SuperposicionIvan Aldo Chumbes Lopez67% (3)
- Tema 1B - Deformaciones y DesplazamientosDocumento60 páginasTema 1B - Deformaciones y DesplazamientosMartin Gaston ParodiAún no hay calificaciones
- Tema 2Documento37 páginasTema 2luciaAún no hay calificaciones
- Linea de Influencia Viga IsostaticaDocumento4 páginasLinea de Influencia Viga IsostaticaDiego Gonzalo ChoquejahuaAún no hay calificaciones
- Ejercicios de RM 2Documento4 páginasEjercicios de RM 2SamuelHandicapAún no hay calificaciones
- Cuadriláteros PropiedadesDocumento3 páginasCuadriláteros PropiedadesCARLOS BRESSLEY SORIANO TUPIÑO100% (1)
- Semana 08 - Semejanza y ProporcionalidadDocumento4 páginasSemana 08 - Semejanza y ProporcionalidadCarlos CardenasAún no hay calificaciones
- Cuadrilateros: Propiedades FundamentalesDocumento3 páginasCuadrilateros: Propiedades FundamentalesJuanjo Fernández80% (10)
- Geometría Aduni Anual Virtual Semana 11Documento4 páginasGeometría Aduni Anual Virtual Semana 11Nilson Villez100% (1)
- S4 Teoria Ien 2023Documento91 páginasS4 Teoria Ien 2023Usuario877Aún no hay calificaciones
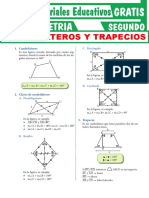
- Cuadriláteros y Trapecios para Segundo Grado de SecundariaDocumento4 páginasCuadriláteros y Trapecios para Segundo Grado de SecundariaRaul Martin Orosco PaucarAún no hay calificaciones
- Área de Regiones Triangulares para Quinto Grado de Secundaria PDFDocumento4 páginasÁrea de Regiones Triangulares para Quinto Grado de Secundaria PDFSebastian MantariAún no hay calificaciones
- Métodos - Línea de InfluenciaDocumento3 páginasMétodos - Línea de InfluenciaReysa Coral RodríguezAún no hay calificaciones
- Puentes Con AASHTO LRFD 2014 - Ing. Arturo Rodríguez SerquénDocumento93 páginasPuentes Con AASHTO LRFD 2014 - Ing. Arturo Rodríguez SerquénRoberto Jhony Huaripata Romero0% (1)
- Congruencia de TriangulosDocumento4 páginasCongruencia de TriangulosMoisés Apaza QuinchoAún no hay calificaciones
- Lineas Influencia 2021Documento38 páginasLineas Influencia 2021Claudia Mireya SosaAún no hay calificaciones
- GE Sem11Documento8 páginasGE Sem11Ana HuayhuaAún no hay calificaciones
- Tarea 5to SecDocumento7 páginasTarea 5to SecJesus CastilloAún no hay calificaciones
- Romboide: H H A BDocumento4 páginasRomboide: H H A Besteban reynoso alvinoAún no hay calificaciones
- Circunferencia II, Proporcionalidad de Segmentos y Semejanza de Triángulos - TareaDocumento2 páginasCircunferencia II, Proporcionalidad de Segmentos y Semejanza de Triángulos - Tareame0% (1)
- Cuadriláteros y Trapecios para Segundo Grado de SecundariaDocumento4 páginasCuadriláteros y Trapecios para Segundo Grado de Secundariajulio sanchez camonesAún no hay calificaciones
- 4 G Niii 2BDocumento38 páginas4 G Niii 2BJesus CarrascoAún no hay calificaciones
- Problemas de Áreas de Regiones Cuadrangulares para Primer Grado de SecundariaDocumento3 páginasProblemas de Áreas de Regiones Cuadrangulares para Primer Grado de SecundariaROEL JAVIER RAMOS ROJASAún no hay calificaciones
- Unidad 3 - Arcos Triarticulados - Parte 1Documento22 páginasUnidad 3 - Arcos Triarticulados - Parte 1M3Ss1 V3Rg4L4RG4Aún no hay calificaciones
- 1° Sec. Cuadriláteros IDocumento4 páginas1° Sec. Cuadriláteros INelson B mendozaAún no hay calificaciones
- Geometria - ParalelogramosDocumento4 páginasGeometria - ParalelogramosDennis Yholver Palacios BautistaAún no hay calificaciones
- Aritmética - 3 - Repaso 1 PDFDocumento3 páginasAritmética - 3 - Repaso 1 PDFJesús Gonzalo Béjar PérezAún no hay calificaciones
- Calapenshko Ge Sem11Documento9 páginasCalapenshko Ge Sem11Rebeca AntonioAún no hay calificaciones
- Geometría 5°añoDocumento32 páginasGeometría 5°añoJulio BarbozaAún no hay calificaciones
- Magnitud ProporcinalDocumento16 páginasMagnitud Proporcinalcesar huayhuaAún no hay calificaciones
- Chamache 02Documento8 páginasChamache 02Academia: Thales de MiletoAún no hay calificaciones
- Geometria y Medidas - A - CQ PDFDocumento4 páginasGeometria y Medidas - A - CQ PDFEstefanny Mendoza HuamanchumoAún no hay calificaciones
- Area de Una Region CuadrangularDocumento3 páginasArea de Una Region CuadrangularKevinEqAún no hay calificaciones
- GE Sem9Documento10 páginasGE Sem9Nilger Gonzalo Paitan HuarangaAún no hay calificaciones
- Guia CircunferenciaDocumento6 páginasGuia Circunferenciaiwanapapu100% (3)
- Formato-Universal-2Col (FIL)Documento2 páginasFormato-Universal-2Col (FIL)PERCY TORRES AVALOSAún no hay calificaciones
- Cadriláter0s 4° Sec - 2023Documento4 páginasCadriláter0s 4° Sec - 2023Cielo Cuba GarciaAún no hay calificaciones
- Geometría Sem 3Documento4 páginasGeometría Sem 3ELMER TIGRE HUAMANAún no hay calificaciones
- Área de Regiones Triangulares para Quinto Grado de SecundariaDocumento6 páginasÁrea de Regiones Triangulares para Quinto Grado de SecundariaMIRELLA TORRES FERNANDEZAún no hay calificaciones
- Problemas de Semejanza de Triángulos para Tercer Grado de SecundariaDocumento3 páginasProblemas de Semejanza de Triángulos para Tercer Grado de SecundariaLuis Alejandro AnayaAún no hay calificaciones
- Geometria - R1 - Triángulo y Congruencia de TriángulosDocumento9 páginasGeometria - R1 - Triángulo y Congruencia de TriángulosEnrique PuenteAún no hay calificaciones
- Ejemplos de Principios de Superposicion - en Vigas y MarcosDocumento62 páginasEjemplos de Principios de Superposicion - en Vigas y Marcosalberto100% (1)
- Clase 5 GeometriaDocumento6 páginasClase 5 GeometriaAriana EscuderoAún no hay calificaciones
- Pendiente y Flecha 1Documento40 páginasPendiente y Flecha 1HERBERT ALEJANDRO GUTIERREZ DIAZAún no hay calificaciones
- Guia de Aprendizaje de Semejanza de TrianguloDocumento7 páginasGuia de Aprendizaje de Semejanza de TrianguloHector Ronaldo Coca MamaniAún no hay calificaciones
- GE Sem11Documento9 páginasGE Sem11edward VladimirovichAún no hay calificaciones
- G-26 Mov. General AceleraciónDocumento5 páginasG-26 Mov. General AceleracióndayeAún no hay calificaciones
- Ley Provincial 10772Documento8 páginasLey Provincial 10772LuissinnaAún no hay calificaciones
- Limites Chile BoliviaDocumento14 páginasLimites Chile BoliviaArtemio HlAún no hay calificaciones
- 2020-11-30 PDFDocumento8 páginas2020-11-30 PDFJorge LeonAún no hay calificaciones
- Conocimiento Basico de AduanasDocumento6 páginasConocimiento Basico de AduanasMariaGutierrez1Aún no hay calificaciones
- V3115-La Eficacia Del DerechoDocumento49 páginasV3115-La Eficacia Del DerechoDúber Celis75% (4)
- Actividad 2 - Taller Práctico 1 - Interés Simple e Interés CompuestoDocumento7 páginasActividad 2 - Taller Práctico 1 - Interés Simple e Interés Compuestodeivid abello marinAún no hay calificaciones
- Movimiento EdupanistaDocumento9 páginasMovimiento EdupanistaMaríaTeresa Gertrudis Carreño GarcíaAún no hay calificaciones
- Definición de PasaporteDocumento5 páginasDefinición de PasaporteAnonymous ND8OkKMMwAún no hay calificaciones
- Preguntas para ExamenDocumento6 páginasPreguntas para ExamenAldo Sosa OjedaAún no hay calificaciones
- B2CDocumento11 páginasB2CRICHARDAún no hay calificaciones
- AnalissDocumento8 páginasAnalissRICARDO MARTIN JUAREZ RIVERAAún no hay calificaciones
- Trabajo de Gestion de CalidadDocumento5 páginasTrabajo de Gestion de CalidadDanilo Elvis ORDAYA LAURAAún no hay calificaciones
- Documento 2Documento1 páginaDocumento 2Silvia Paulina Cornejo CornejoAún no hay calificaciones
- Curp Temr880830mpldrs08Documento1 páginaCurp Temr880830mpldrs08Mike MorenoAún no hay calificaciones
- Ensayo InimputabilidadDocumento23 páginasEnsayo InimputabilidadAdriana100% (1)
- Taller Industria y Comercio e Impo Consumo - 2021ADocumento2 páginasTaller Industria y Comercio e Impo Consumo - 2021Aana camila garciaAún no hay calificaciones
- Como Combatir La PobrezaDocumento4 páginasComo Combatir La PobrezaKaryna CM100% (1)
- Autoevaluación 3 - AUDITORIA FINANCIERA II (10207)Documento5 páginasAutoevaluación 3 - AUDITORIA FINANCIERA II (10207)Walter Molina CasiqueAún no hay calificaciones
- Informe - El Asedio y El DesprecioDocumento99 páginasInforme - El Asedio y El DesprecioCasiopeaAún no hay calificaciones
- Analisis Jurisprudencial c-621-2003Documento3 páginasAnalisis Jurisprudencial c-621-2003ANGIE YULIETH ARTUNDUAGA ANGEL0% (1)
- Plan Estrategico de Desarrollo JuvenilDocumento89 páginasPlan Estrategico de Desarrollo JuvenillineproduccionesAún no hay calificaciones
- Vigo Es VivaldiDocumento2 páginasVigo Es VivaldiluligalamanpAún no hay calificaciones
- CONTRATO DE ALQUILER (Modificado)Documento1 páginaCONTRATO DE ALQUILER (Modificado)Luis Caceres ZamataAún no hay calificaciones
- Prueba Papelucho HistoriadorDocumento7 páginasPrueba Papelucho HistoriadorClaudia Ahumada PérezAún no hay calificaciones
- Ficha Caracterización EmprendedorDocumento1 páginaFicha Caracterización EmprendedorValentina López PaltaAún no hay calificaciones
- Derechos de Los PacientesDocumento5 páginasDerechos de Los PacientesAlexander MorenoAún no hay calificaciones
- Antologia Del Golpe de Estado de 1963 en HondurasDocumento5 páginasAntologia Del Golpe de Estado de 1963 en Hondurasdaba86geminisAún no hay calificaciones
- Asistencia o Asistencialismo PDFDocumento41 páginasAsistencia o Asistencialismo PDFwilma0% (1)
- OIT-Cómo Interpretar Un Balance-1987 PDFDocumento268 páginasOIT-Cómo Interpretar Un Balance-1987 PDFDenise Huayta100% (1)
- Función Del Proyecto Educació en La Consildación Del EstadoDocumento6 páginasFunción Del Proyecto Educació en La Consildación Del EstadoNaiara JimenezAún no hay calificaciones
- La metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceDe EverandLa metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceCalificación: 5 de 5 estrellas5/5 (8)
- Batidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoDe EverandBatidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoCalificación: 5 de 5 estrellas5/5 (2)
- Reconstrucción de dientes endodonciados: Pautas de actuación clínicaDe EverandReconstrucción de dientes endodonciados: Pautas de actuación clínicaCalificación: 5 de 5 estrellas5/5 (4)
- Disciplina Mental: Técnicas infalibles para lograr todo lo que te propones y eliminar la pereza y la procrastinación de tu vida para siempreDe EverandDisciplina Mental: Técnicas infalibles para lograr todo lo que te propones y eliminar la pereza y la procrastinación de tu vida para siempreCalificación: 5 de 5 estrellas5/5 (3)
- Zensorialmente : Dejá que tu cuerpo sea tu cerebroDe EverandZensorialmente : Dejá que tu cuerpo sea tu cerebroAún no hay calificaciones
- La revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaDe EverandLa revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaCalificación: 5 de 5 estrellas5/5 (200)
- Anatomía & 100 estiramientos Esenciales (Color): Técnicas, beneficios, precauciones, consejos, tablas de series, dolenciasDe EverandAnatomía & 100 estiramientos Esenciales (Color): Técnicas, beneficios, precauciones, consejos, tablas de series, dolenciasCalificación: 4.5 de 5 estrellas4.5/5 (21)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- Trucos para Leer la Mente de los Demás: Cómo Adivinar el Pensamiento de los Demás con Poco Esfuerzo. 2 Libros en 1 - Secretos de la Psicología Oscura, Cómo ser un Detector de MentirasDe EverandTrucos para Leer la Mente de los Demás: Cómo Adivinar el Pensamiento de los Demás con Poco Esfuerzo. 2 Libros en 1 - Secretos de la Psicología Oscura, Cómo ser un Detector de MentirasCalificación: 4.5 de 5 estrellas4.5/5 (3)
- Proyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadDe EverandProyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadCalificación: 5 de 5 estrellas5/5 (1)
- La vibración de las ondas cerebrales: Recuperar el ritmo de una vida saludable y felizDe EverandLa vibración de las ondas cerebrales: Recuperar el ritmo de una vida saludable y felizCalificación: 5 de 5 estrellas5/5 (7)
- Teoría de juegos: Una introducción matemática a la toma de decisionesDe EverandTeoría de juegos: Una introducción matemática a la toma de decisionesCalificación: 4 de 5 estrellas4/5 (1)
- Neurociencia para vencer la depresión: La esprial ascendenteDe EverandNeurociencia para vencer la depresión: La esprial ascendenteCalificación: 4.5 de 5 estrellas4.5/5 (10)
- Interpretación del ECG: Una Guía Práctica e Intuitiva para Aprender a Leer el ECG y Diagnosticar y Tratar ArritmiasDe EverandInterpretación del ECG: Una Guía Práctica e Intuitiva para Aprender a Leer el ECG y Diagnosticar y Tratar ArritmiasAún no hay calificaciones
- El concepto Mulligan de terapia manual (Color)De EverandEl concepto Mulligan de terapia manual (Color)Calificación: 5 de 5 estrellas5/5 (3)
- 50 técnicas de mindfulness para la ansiedad, la depresión, el estrés y el dolor: Mindfulness como terapiaDe Everand50 técnicas de mindfulness para la ansiedad, la depresión, el estrés y el dolor: Mindfulness como terapiaCalificación: 4 de 5 estrellas4/5 (37)
- Cardiología y enfermedades cardiovascularesDe EverandCardiología y enfermedades cardiovascularesCalificación: 5 de 5 estrellas5/5 (1)
- La invasión de la pseudociencia: Claves para orientarse en un mundo en donde casi todo es posibleDe EverandLa invasión de la pseudociencia: Claves para orientarse en un mundo en donde casi todo es posibleCalificación: 4.5 de 5 estrellas4.5/5 (15)
- Neuropsicología: Los fundamentos de la materiaDe EverandNeuropsicología: Los fundamentos de la materiaCalificación: 5 de 5 estrellas5/5 (1)