También podría gustarte
- Reporte Post Intervencion Del Motor-Bomba 15 HPDocumento11 páginasReporte Post Intervencion Del Motor-Bomba 15 HPNotificaciones Playa MarAún no hay calificaciones
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- MICROPILOTES Marzo 2018Documento117 páginasMICROPILOTES Marzo 2018ignaturo0% (1)
- Funcion CuadraticaDocumento31 páginasFuncion CuadraticaVíctor Manuel100% (1)
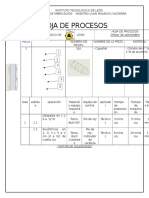
- Hoja de Procesos (Reina - Ajedrez 1)Documento4 páginasHoja de Procesos (Reina - Ajedrez 1)Alex AndrangoAún no hay calificaciones
- Sistemas de motorizACIONDocumento10 páginasSistemas de motorizACIONLucas ReyesAún no hay calificaciones
- Control Moderno Ogata Ejercicios 8Documento12 páginasControl Moderno Ogata Ejercicios 8DavidAún no hay calificaciones
- Fabricación Chasis Ducati MonsterDocumento102 páginasFabricación Chasis Ducati MonsterJaime Royo Garcia50% (2)
- 4.1 Apoyos RedundantesDocumento6 páginas4.1 Apoyos RedundantesBautista AldoAún no hay calificaciones
- Movimiento DependienteDocumento6 páginasMovimiento DependienteMalenny Toledo RafaeleAún no hay calificaciones
- Problema Viga Isostatica Nº7Documento5 páginasProblema Viga Isostatica Nº7Molina Martínez BelemAún no hay calificaciones
- 641 PDFDocumento4 páginas641 PDFGerardo MendozaAún no hay calificaciones
- FlexiónDocumento5 páginasFlexiónMelanie Sarahi González TovarAún no hay calificaciones
- Tarea 18Documento6 páginasTarea 18Melanie Sarahi González TovarAún no hay calificaciones
- Analisis Estatico de Vigas Continuas Con CEINCI-LADocumento16 páginasAnalisis Estatico de Vigas Continuas Con CEINCI-LAtonyAún no hay calificaciones
- AsdfasdDocumento8 páginasAsdfasdJimmy AnticonaAún no hay calificaciones
- Ejercicio 614Documento6 páginasEjercicio 614Diiego BecerraAún no hay calificaciones
- Problema 7-48Documento2 páginasProblema 7-48Lisandro Camacho PatiñoAún no hay calificaciones
- Punto 2 CDocumento3 páginasPunto 2 CJeffersonAún no hay calificaciones
- Cáculo Diferencial 1 Alejandra SánchezDocumento11 páginasCáculo Diferencial 1 Alejandra Sánchezzuluagaja0075918Aún no hay calificaciones
- DerivadasDocumento3 páginasDerivadasJimmy Benites EspinozaAún no hay calificaciones
- Ejercicio Pozo CuanticoDocumento51 páginasEjercicio Pozo CuanticoCamilo Alejandro Rojas PachecoAún no hay calificaciones
- Cáculo Diferencial Trabajo 1Documento11 páginasCáculo Diferencial Trabajo 1zuluagaja0075918Aún no hay calificaciones
- Tercer Parcial MNDocumento4 páginasTercer Parcial MNZrtâ Xërëzhâ GrëënAún no hay calificaciones
- 2 Método de Las FuerzasDocumento20 páginas2 Método de Las FuerzasFLORES DE LA CRUZ CEUS THAYLERAún no hay calificaciones
- 4° Medio Matemáticas Sem3Documento18 páginas4° Medio Matemáticas Sem3Giannia VegaAún no hay calificaciones
- Desarrollo Trabajo Domiciliario de Análisis Estructural IIDocumento8 páginasDesarrollo Trabajo Domiciliario de Análisis Estructural IICristhian Gálvez ZanabriaAún no hay calificaciones
- Deber6 Ortuno Fernando 2521Documento21 páginasDeber6 Ortuno Fernando 2521Fernando SanchezAún no hay calificaciones
- Función PotencialDocumento11 páginasFunción PotencialAaron RobinsonAún no hay calificaciones
- Practica5 Integración Con MapleDocumento8 páginasPractica5 Integración Con MapleLuz Roberto Palacios AlcantarAún no hay calificaciones
- Taller Regla Del Trapecio PDFDocumento7 páginasTaller Regla Del Trapecio PDFSteven L NeiraAún no hay calificaciones
- Variable Aleatoria (1) para La ClaseDocumento15 páginasVariable Aleatoria (1) para La ClaseLisett SusanAún no hay calificaciones
- Ayudantias I2Documento20 páginasAyudantias I2Lindsay FernandezAún no hay calificaciones
- RESUELTOS de Ecuaciones No Lineales EXPDocumento10 páginasRESUELTOS de Ecuaciones No Lineales EXPYosselin Alondra ChAún no hay calificaciones
- Tensor Energía-MomentoDocumento4 páginasTensor Energía-MomentoVirgilio Jose Cambraia LopesAún no hay calificaciones
- Clase 6Documento20 páginasClase 6Lucas MagnoliAún no hay calificaciones
- Variable AleatoriaDocumento22 páginasVariable AleatoriaJuanMoralesRuizAún no hay calificaciones
- Clase01 Métodosnuméricos 2023Documento14 páginasClase01 Métodosnuméricos 2023nANDA GOLLAún no hay calificaciones
- Examen 06 2018 MatemáticasDocumento2 páginasExamen 06 2018 MatemáticasmartacuencaserranoAún no hay calificaciones
- Desarrollo de Ejercicios Estudiante 4 CalculoDocumento10 páginasDesarrollo de Ejercicios Estudiante 4 CalculoYaneth ArcosAún no hay calificaciones
- Resolución Del Segundo Examen ParcialDocumento12 páginasResolución Del Segundo Examen ParcialYou KimAún no hay calificaciones
- Notas 5Documento11 páginasNotas 5Hugo HiriartAún no hay calificaciones
- Graficas TrigDocumento24 páginasGraficas Trigpatriciogonzalo12345Aún no hay calificaciones
- Parcial 1 (Sec-01-03)Documento7 páginasParcial 1 (Sec-01-03)Stephani Sukey Rivero PerazaAún no hay calificaciones
- Curvas ClasicasDocumento5 páginasCurvas ClasicasNacho CorradoAún no hay calificaciones
- Grupo117 - JhonSuarez - EJ3BDocumento9 páginasGrupo117 - JhonSuarez - EJ3BTicman SánchezAún no hay calificaciones
- Apuntes Derivadas-MasisDocumento4 páginasApuntes Derivadas-MasisJustin RojasAún no hay calificaciones
- Deber Parcial 3Documento2 páginasDeber Parcial 3Jose GuatemalAún no hay calificaciones
- Algebra FuncionesDocumento27 páginasAlgebra FuncionesoliverAún no hay calificaciones
- Relacion 3Documento3 páginasRelacion 3lid20Aún no hay calificaciones
- Matematica para Los Negocios 8Documento18 páginasMatematica para Los Negocios 8Arnol MalpasoAún no hay calificaciones
- Diapositiva Sesion 05Documento14 páginasDiapositiva Sesion 05Meister YassirAún no hay calificaciones
- Función CuadráticaDocumento2 páginasFunción CuadráticaLeonard mauricio Demanuel churaAún no hay calificaciones
- Práctica 11 y 12Documento7 páginasPráctica 11 y 12Vane PovedaAún no hay calificaciones
- Columnas LargasDocumento10 páginasColumnas LargasSebastian SimbañaAún no hay calificaciones
- Tarea 3 Desafio 3 - WillianMarquezDocumento17 páginasTarea 3 Desafio 3 - WillianMarquezFundación Social Vive ColombiaAún no hay calificaciones
- Apuntes Unidad 3 - ResistenciaDocumento8 páginasApuntes Unidad 3 - Resistencialonchito74Aún no hay calificaciones
- Guía 1 DerivadasDocumento45 páginasGuía 1 DerivadasRamon VelasquezAún no hay calificaciones
- Sebastián Díaz Taller3Documento9 páginasSebastián Díaz Taller3Sebastian DiazAún no hay calificaciones
- Guía 10. 2do Medio. Funcion CuadráticaDocumento4 páginasGuía 10. 2do Medio. Funcion CuadráticaEmily Vasquez GarridoAún no hay calificaciones
- Clase10 AnotacionesDocumento51 páginasClase10 AnotacionesFernando LopezAún no hay calificaciones
- Listadeejercicios SolucionarioDocumento18 páginasListadeejercicios Solucionariocositas para muñecasAún no hay calificaciones
- Trabajo de Algebra Lineal 2Documento13 páginasTrabajo de Algebra Lineal 2camilaAún no hay calificaciones
- Infografia Linea Del Tiempo Timeline Historia Cronologia Empresa Profesional MulticolorDocumento3 páginasInfografia Linea Del Tiempo Timeline Historia Cronologia Empresa Profesional MulticolorMolina Martínez BelemAún no hay calificaciones
- PROBLEMARIODocumento7 páginasPROBLEMARIOMolina Martínez BelemAún no hay calificaciones
- Tarea 8 Molina Martinez BelemDocumento3 páginasTarea 8 Molina Martinez BelemMolina Martínez BelemAún no hay calificaciones
- Tarea 4 Molina Martinez BelemDocumento4 páginasTarea 4 Molina Martinez BelemMolina Martínez BelemAún no hay calificaciones
- Tarea 7 Molina Martinez BelemDocumento4 páginasTarea 7 Molina Martinez BelemMolina Martínez BelemAún no hay calificaciones
- Clase 2 MciDocumento23 páginasClase 2 MciHache Contreras PerezAún no hay calificaciones
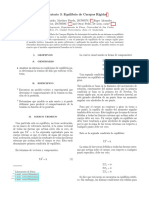
- Laboratorio 3 Equilibrio de Cuerpos RigidosDocumento5 páginasLaboratorio 3 Equilibrio de Cuerpos RigidosKevin GuerraAún no hay calificaciones
- Comando y Proteccion de Motores ElectricosDocumento2 páginasComando y Proteccion de Motores ElectricosJosé PerezAún no hay calificaciones
- Hoja de ProcesosDocumento8 páginasHoja de ProcesosLuis Ernesto Mercado ChagoyaAún no hay calificaciones
- 05 Notas de RefrigeracionDocumento71 páginas05 Notas de RefrigeracionLuis Antonio Gutierrez GutierrezAún no hay calificaciones
- Práctica 4Documento15 páginasPráctica 4Angel VilledasAún no hay calificaciones
- Emisario SubmarinoDocumento47 páginasEmisario SubmarinoAríel VeraAún no hay calificaciones
- 04-Metrado PirqueDocumento11 páginas04-Metrado PirqueHugo SilvaAún no hay calificaciones
- Formatoalumnotrabajofinal TR2Documento8 páginasFormatoalumnotrabajofinal TR2Aiman ZanaAún no hay calificaciones
- Física 3Documento2 páginasFísica 3Karla De la cruzAún no hay calificaciones
- Sánchez Macedo Luis Informe 2 Laboratorio Ingenieria de MaterialesDocumento6 páginasSánchez Macedo Luis Informe 2 Laboratorio Ingenieria de MaterialesEleazar SanchezAún no hay calificaciones
- Evaluación Parcial 1 Componente Teórico - Revisión Del IntentoDocumento1 páginaEvaluación Parcial 1 Componente Teórico - Revisión Del IntentoJeremy ChambaAún no hay calificaciones
- Manual TornoDocumento25 páginasManual TornoAle CamarilloAún no hay calificaciones
- Paola Linet SMDocumento4 páginasPaola Linet SMmauricio hernandezAún no hay calificaciones
- Prac. 8 - Ley de Faraday e Inductancia 2017Documento1 páginaPrac. 8 - Ley de Faraday e Inductancia 2017hyrulean64Aún no hay calificaciones
- Catalogo MitsukiDocumento31 páginasCatalogo MitsukiJorge Hernandez100% (1)
- Examen Primer Tercio Gaitan MariaDocumento6 páginasExamen Primer Tercio Gaitan MariaMaria fernandaAún no hay calificaciones
- Mapa Conceptual Lab 5 Maquina de Atwood y F. Cent Rip Eta.Documento4 páginasMapa Conceptual Lab 5 Maquina de Atwood y F. Cent Rip Eta.tantesphillAún no hay calificaciones
- Estructuras en GuaduaDocumento14 páginasEstructuras en GuaduaDaniel PinheiroAún no hay calificaciones
- Suministro Domestico de Agua Caliente (Grupo 11)Documento26 páginasSuministro Domestico de Agua Caliente (Grupo 11)Royer Valdivia BarretoAún no hay calificaciones
- 1.-PPT Estructuras Metalicas PDFDocumento30 páginas1.-PPT Estructuras Metalicas PDFrosagulAún no hay calificaciones
- Manual Bomba Doble Succion v.d.07 09Documento14 páginasManual Bomba Doble Succion v.d.07 09Gabriel HernandezAún no hay calificaciones
- Termodinámica Parámetros de MotorDocumento7 páginasTermodinámica Parámetros de MotorJhonny VargasAún no hay calificaciones