También podría gustarte
- Códigos Sagrados Numéricos de VelocidadDocumento57 páginasCódigos Sagrados Numéricos de VelocidadHenrry Maita100% (9)
- 9 Diseño de Sistemas Secuenciales TeamsDocumento35 páginas9 Diseño de Sistemas Secuenciales TeamsPaola de LeonAún no hay calificaciones
- Lab 2 Maquinas RotativasDocumento14 páginasLab 2 Maquinas RotativasAlvaro TrigosoAún no hay calificaciones
- Comic o HistorietaDocumento18 páginasComic o Historietarositabelen100% (1)
- 10bcs-Mecanismos Tema2 4 PDFDocumento38 páginas10bcs-Mecanismos Tema2 4 PDFVerónicaMhAún no hay calificaciones
- Resumen Del Libro El Quinto OídoDocumento4 páginasResumen Del Libro El Quinto Oídoarturo durand cabanillasAún no hay calificaciones
- Contador AsincronoDocumento16 páginasContador AsincronoDANIEL ANTONIO DANIEL ANTONIO DIAZ/SUAZOAún no hay calificaciones
- Separata Sesion 3 SEMANA 2 Derivadas Parciales PDFDocumento2 páginasSeparata Sesion 3 SEMANA 2 Derivadas Parciales PDFKenyi Calle Cruz0% (1)
- Proyecto Final MECANISMO CAMINANTEDocumento6 páginasProyecto Final MECANISMO CAMINANTEVICTOR HUGO FLORENCIO ORTA100% (1)
- Cap 2 Campo ElectricoDocumento22 páginasCap 2 Campo ElectricoLucas Moreto100% (2)
- UNIDAD 3 - Parte 2 - Fisica IIDocumento32 páginasUNIDAD 3 - Parte 2 - Fisica IIJuan Camilo PinoAún no hay calificaciones
- Ejercicios de Faraday e InductanciaDocumento14 páginasEjercicios de Faraday e InductanciaFranqito Romero0% (1)
- Tarea EquilibrioDocumento1 páginaTarea EquilibrioDaniela JimenezAún no hay calificaciones
- MEC - Ley BiotSvart y Ley AmpereDocumento11 páginasMEC - Ley BiotSvart y Ley AmpereHolman Orlando Vargas SalazarAún no hay calificaciones
- Ensayo 'Monopolos Magnéticos'.Documento13 páginasEnsayo 'Monopolos Magnéticos'.Marcelino MartínezAún no hay calificaciones
- Proyecto Mov AmortiguadoDocumento8 páginasProyecto Mov AmortiguadoBryan X TorresAún no hay calificaciones
- Campo Electrico, Ley de Gauss, EjerciciosDocumento3 páginasCampo Electrico, Ley de Gauss, Ejerciciosalexis jonathanAún no hay calificaciones
- Examen 2da Unidad de Ing de MaterialesDocumento7 páginasExamen 2da Unidad de Ing de MaterialesALBERT JEREMY BRIONES PRADOAún no hay calificaciones
- Máquina de Atwood. Josenny DiazDocumento7 páginasMáquina de Atwood. Josenny DiazJosenny Diaz OlivoAún no hay calificaciones
- LT p2 Gr6 Calvache GranjaDocumento6 páginasLT p2 Gr6 Calvache GranjaGabriel Alejandro GodoyAún no hay calificaciones
- Fisica de La CatapultaDocumento12 páginasFisica de La CatapultaStargateAAún no hay calificaciones
- PBB FatherDocumento2 páginasPBB FatherGloria Ines ForeroAún no hay calificaciones
- Examen Parcial (B) Electricidad - y - Magnetiso 2021-1Documento2 páginasExamen Parcial (B) Electricidad - y - Magnetiso 2021-1Andrea contrerasAún no hay calificaciones
- Informe 1 Fisica 3Documento12 páginasInforme 1 Fisica 3JerinsonAún no hay calificaciones
- Tarea 3.Documento6 páginasTarea 3.Brayan Daniel DuranAún no hay calificaciones
- Campos MagnetismoDocumento2 páginasCampos MagnetismoMatema Tica MarcellAún no hay calificaciones
- Laboratorio N°2 Ley de Ohm - 2021N Circuitos ElectricosDocumento6 páginasLaboratorio N°2 Ley de Ohm - 2021N Circuitos ElectricosLuis VargasAún no hay calificaciones
- Ejercicios Movimiento Ondulatorio - Viajeras y Armonicas en La Cuerda Fisica IIDocumento4 páginasEjercicios Movimiento Ondulatorio - Viajeras y Armonicas en La Cuerda Fisica IIMarycielo Avendaño MirelesAún no hay calificaciones
- Carranza Inga Yadir ElmerDocumento54 páginasCarranza Inga Yadir ElmerCondezoAún no hay calificaciones
- Conducción Semiconductores. Teoría - ProblemasDocumento66 páginasConducción Semiconductores. Teoría - ProblemasYoel Chino QuispeAún no hay calificaciones
- Problemas Sobre Control ClasicoDocumento80 páginasProblemas Sobre Control ClasicoScott PerlaAún no hay calificaciones
- Informe de Laboratorio Número 02Documento8 páginasInforme de Laboratorio Número 02udamar perezAún no hay calificaciones
- 2.0.taller Diagnóstico 3-Resistencia de Materiales Anggie RincónDocumento2 páginas2.0.taller Diagnóstico 3-Resistencia de Materiales Anggie RincónHarol AngaritaAún no hay calificaciones
- Practica Circuitos ElectronicosDocumento6 páginasPractica Circuitos ElectronicosAndré Mateo Triveño LuqueAún no hay calificaciones
- 1er Laboratorio de FisicaDocumento17 páginas1er Laboratorio de Fisicaraul rey raymundo romaniAún no hay calificaciones
- Magnetostatica - Problemas Propuestos IDocumento3 páginasMagnetostatica - Problemas Propuestos IDaniel Esteban Hormazábal LópezAún no hay calificaciones
- 3pd312u13 2Documento7 páginas3pd312u13 2Alexis Capillo33% (3)
- Laboratorio 06 - Grupo 5Documento22 páginasLaboratorio 06 - Grupo 5Ronald VegaAún no hay calificaciones
- Ejercicios Lenguaje de Mediciones11Documento13 páginasEjercicios Lenguaje de Mediciones11Kevin GutiérrezAún no hay calificaciones
- SCARA Realizando La Trayectoria de Bezier Carlos Palomino Cruz 1992315Documento7 páginasSCARA Realizando La Trayectoria de Bezier Carlos Palomino Cruz 1992315Ruben HernanAún no hay calificaciones
- Ejercicios de ElectromagnetismoDocumento1 páginaEjercicios de ElectromagnetismoRolvideer GonzalezAún no hay calificaciones
- 01 Conversion Tap ADocumento140 páginas01 Conversion Tap Acalamandro saezAún no hay calificaciones
- Deber 4 Fundamentos de CircuitosDocumento4 páginasDeber 4 Fundamentos de CircuitosMichael Prado100% (1)
- FuentesTaller 3 - CompressedDocumento5 páginasFuentesTaller 3 - CompressedSergio RomeroAún no hay calificaciones
- Sesion de Matematica para IngenieriaDocumento9 páginasSesion de Matematica para Ingenieria192812Aún no hay calificaciones
- Ecuaciones Maxwell WikiDocumento12 páginasEcuaciones Maxwell Wiki1SRA3LAún no hay calificaciones
- Segundo Examen ParcialDocumento1 páginaSegundo Examen Parcialjhenser7gonzales7de7Aún no hay calificaciones
- FisicaDocumento2 páginasFisicasergioAún no hay calificaciones
- Practica 6Documento10 páginasPractica 6damian perezAún no hay calificaciones
- Campo Magnético AnilloDocumento2 páginasCampo Magnético AnilloCamila Paz FigueroaAún no hay calificaciones
- Fisica II - Exa. Sustitutorio-Inf. - 20-II-RecuperacionDocumento2 páginasFisica II - Exa. Sustitutorio-Inf. - 20-II-RecuperacionJAVIER MINCHOLA SANCHEZAún no hay calificaciones
- Laboratorio N°1 Resistencicas - 2021N Circuitos ElectricosDocumento8 páginasLaboratorio N°1 Resistencicas - 2021N Circuitos ElectricosLuis VargasAún no hay calificaciones
- Taller AntenasDocumento3 páginasTaller AntenasAndres Jesus Moreno Arias100% (1)
- Informe 5 Electricidad y Magnetismo JAARADocumento19 páginasInforme 5 Electricidad y Magnetismo JAARAC Geramias MoralesAún no hay calificaciones
- Utp PC2 CmatDocumento3 páginasUtp PC2 CmatSamir CoriaAún no hay calificaciones
- DialogoDocumento2 páginasDialogoC.c. EstherAún no hay calificaciones
- Teoría de CampoDocumento30 páginasTeoría de CampoWilber AleluyaAún no hay calificaciones
- Prueba 2Documento4 páginasPrueba 2Jenny UreyAún no hay calificaciones
- Laboratorio Grupo8Documento21 páginasLaboratorio Grupo8juanAún no hay calificaciones
- 36 Trabajo2Documento10 páginas36 Trabajo2caldas3333Aún no hay calificaciones
- Mcu Equipo 5Documento17 páginasMcu Equipo 5Emely Miranda EspinozaAún no hay calificaciones
- Gráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraDe EverandGráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraAún no hay calificaciones
- Banda TransportadoraDocumento7 páginasBanda TransportadoraPAVEL MARCELINO MORENO JARAMILLOAún no hay calificaciones
- 0014379121-Pavel Marcelino Moreno Jaramillo-PlmDocumento1 página0014379121-Pavel Marcelino Moreno Jaramillo-PlmPAVEL MARCELINO MORENO JARAMILLOAún no hay calificaciones
- 06 Violencia EscolarDocumento4 páginas06 Violencia EscolarPAVEL MARCELINO MORENO JARAMILLOAún no hay calificaciones
- Acuerdo Hon Carta CompromisoDocumento2 páginasAcuerdo Hon Carta CompromisoPAVEL MARCELINO MORENO JARAMILLOAún no hay calificaciones
- Apacuserecibofisicogobmx PDFDocumento2 páginasApacuserecibofisicogobmx PDFPAVEL MARCELINO MORENO JARAMILLOAún no hay calificaciones
- Tablas de Las Simbologías de Las Normas ISA - SAMADocumento3 páginasTablas de Las Simbologías de Las Normas ISA - SAMAPAVEL MARCELINO MORENO JARAMILLOAún no hay calificaciones
- Mecanismos DefinicionesDocumento5 páginasMecanismos DefinicionesPAVEL MARCELINO MORENO JARAMILLOAún no hay calificaciones
- Grados de LibertadDocumento22 páginasGrados de LibertadPAVEL MARCELINO MORENO JARAMILLOAún no hay calificaciones
- Conceptos Basicos MecanismosDocumento63 páginasConceptos Basicos MecanismosPAVEL MARCELINO MORENO JARAMILLOAún no hay calificaciones
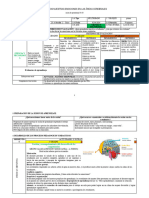
- SESION 03 V CICLO CYT Las Emociones en Sistema CelebralDocumento5 páginasSESION 03 V CICLO CYT Las Emociones en Sistema CelebralSara Joaquin VilaAún no hay calificaciones
- 2da Practica Tecnologia de FluidosDocumento2 páginas2da Practica Tecnologia de FluidosJean Pierre Carranza CavaniAún no hay calificaciones
- ConflictosDocumento5 páginasConflictosJem Ponce CumbrerasAún no hay calificaciones
- Marco Alcarraz - Paola Atalaya - Diego Velasque - Trabajo de Suficiencia Profesional - Titulo Profesional - 2019Documento101 páginasMarco Alcarraz - Paola Atalaya - Diego Velasque - Trabajo de Suficiencia Profesional - Titulo Profesional - 2019seohyunnany alvaresAún no hay calificaciones
- 1.quién Dijo Que La Comunicación Era FácilDocumento7 páginas1.quién Dijo Que La Comunicación Era FácilYeidi milena Cano agudeloAún no hay calificaciones
- Conjuntivitis AgudaDocumento8 páginasConjuntivitis AgudaDiego MartinezAún no hay calificaciones
- AtletismoDocumento49 páginasAtletismoscsegundoAún no hay calificaciones
- Examen de EntradaDocumento6 páginasExamen de EntradaOmar herrera EspinozaAún no hay calificaciones
- BKC Ava V 2013 09 14 PDFDocumento27 páginasBKC Ava V 2013 09 14 PDFElías Manuel Sánchez CastañedaAún no hay calificaciones
- Casación N 4636-2013 Lima PDFDocumento3 páginasCasación N 4636-2013 Lima PDFCECP - Centro de Estudios de Derecho CivilAún no hay calificaciones
- Gallery - Book - 1414 - Actividad 5 Paseando Por La CiudadDocumento10 páginasGallery - Book - 1414 - Actividad 5 Paseando Por La CiudadEly GentileAún no hay calificaciones
- Elementos de La OfrendaDocumento4 páginasElementos de La OfrendaKonoha TultepecAún no hay calificaciones
- Municipio Escolar TripticoDocumento2 páginasMunicipio Escolar TripticoFarráh MejiaAún no hay calificaciones
- Transformada Inversa de LaplaceDocumento5 páginasTransformada Inversa de LaplacePeter CastleAún no hay calificaciones
- C-Real B F TDocumento3 páginasC-Real B F Tleonel_perez_67Aún no hay calificaciones
- Ejercicio de Lógica 4Documento2 páginasEjercicio de Lógica 4Llyuvia Nayelli Diaz FernandezAún no hay calificaciones
- Edgar Allan Poe - El Retrato OvalDocumento2 páginasEdgar Allan Poe - El Retrato OvalSofía alejandra Cortez solisAún no hay calificaciones
- José Guadalupe Ramos HernándezDocumento69 páginasJosé Guadalupe Ramos HernándezFrancisco Josue VargasAún no hay calificaciones
- Losa Aligerada 2015-IDocumento74 páginasLosa Aligerada 2015-ILiz castillo castilloAún no hay calificaciones
- Trabajo para Evaluaciòn ContìnuaDocumento9 páginasTrabajo para Evaluaciòn ContìnuaJack vargasAún no hay calificaciones
- Quiz FisicaDocumento1 páginaQuiz FisicaVIOLEDY JIMENEZ CARDOZOAún no hay calificaciones
- Trabajo de Construccion Del PeicDocumento9 páginasTrabajo de Construccion Del PeicMILEIDY PALENCIAAún no hay calificaciones
- Plantilla de ReporteDocumento11 páginasPlantilla de ReporteAlfie100% (1)
- Obtener Rayo Solar en Perspectiva MilitarDocumento9 páginasObtener Rayo Solar en Perspectiva MilitarAntonio Pablo CruzAún no hay calificaciones
- Unidad 4 Marco LegalDocumento6 páginasUnidad 4 Marco LegalAna Karina ZapataAún no hay calificaciones
- Estudio Riego y VulnerabilidadDocumento92 páginasEstudio Riego y Vulnerabilidadhav_dmm14100% (1)
- Módulo 8 - SolucionadoDocumento37 páginasMódulo 8 - SolucionadoJuan Pablo VillegasAún no hay calificaciones



























































![Cool Kids [Edición Estándar]](https://imgv2-2-f.scribdassets.com/img/word_document/492241565/149x198/717fae0fcb/1677215513?v=1)