También podría gustarte
- 100 Circuitos de Proyectos EducacionalesDe Everand100 Circuitos de Proyectos EducacionalesCalificación: 5 de 5 estrellas5/5 (2)
- Mantenimiento del sistema de alumbrado y señalización. TMVG0209De EverandMantenimiento del sistema de alumbrado y señalización. TMVG0209Calificación: 4.5 de 5 estrellas4.5/5 (2)
- 100 Circuitos de Potencia con SCRs y TriacsDe Everand100 Circuitos de Potencia con SCRs y TriacsCalificación: 3 de 5 estrellas3/5 (5)
- 100 Circuitos de Shields para MotoresDe Everand100 Circuitos de Shields para MotoresCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Montaje y mantenimiento de transformadores. ELEE0109De EverandMontaje y mantenimiento de transformadores. ELEE0109Aún no hay calificaciones
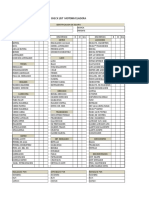
- Check List Motoniveladora. (.Documento1 páginaCheck List Motoniveladora. (.RoSl SLu0% (1)
- Mantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109De EverandMantenimiento de redes eléctricas aéreas de baja tensión. ELEE0109Aún no hay calificaciones
- ACTIVIDADES O DINAMICAS VIRTUALES PARA JOVENES en CuarentenaDocumento6 páginasACTIVIDADES O DINAMICAS VIRTUALES PARA JOVENES en CuarentenaCamilo Rey100% (1)
- Banco de TrabajoDocumento6 páginasBanco de TrabajoMiguel Angel Pastor Ruiz100% (1)
- Seguidor de Linea AnalogicoDocumento9 páginasSeguidor de Linea AnalogicoGeova Gomez50% (2)
- Seguidor de LineaDocumento7 páginasSeguidor de LineaAndicitaaaaAún no hay calificaciones
- SENSOR INFRARROJO: Teoria y PracticaDocumento11 páginasSENSOR INFRARROJO: Teoria y PracticaOptimusTronic100% (33)
- UF1966 - Operaciones auxiliares en el mantenimiento de equipos electrónicosDe EverandUF1966 - Operaciones auxiliares en el mantenimiento de equipos electrónicosCalificación: 5 de 5 estrellas5/5 (1)
- IEEE Carro Seguidor de Linea InformeDocumento4 páginasIEEE Carro Seguidor de Linea InformebyandresmayorgaAún no hay calificaciones
- Encoder Optico PDFDocumento25 páginasEncoder Optico PDFFuerzaRoja25Aún no hay calificaciones
- Carro Seguidor de LíneaDocumento3 páginasCarro Seguidor de LíneaMaria AAlejandra Saavedra RomeroAún no hay calificaciones
- Informe de Carro Seguidor de Luz y LineaDocumento7 páginasInforme de Carro Seguidor de Luz y Lineathehunter014Aún no hay calificaciones
- Sensor CKP, Tipo Optico, Magnetico y Efecto HallDocumento6 páginasSensor CKP, Tipo Optico, Magnetico y Efecto Hallalex guamaniAún no hay calificaciones
- Seguidor de LineaDocumento7 páginasSeguidor de LineaEduardo JapónAún no hay calificaciones
- Practica - Proyecto LedDocumento3 páginasPractica - Proyecto Ledbryan david cornejo ponceAún no hay calificaciones
- Seguidor de LíneaDocumento8 páginasSeguidor de Líneacanoclara11Aún no hay calificaciones
- Informe Seguidor de LineaDocumento11 páginasInforme Seguidor de LineaJuan Negrete100% (2)
- L-Robot Seguidor de Luz - 112215Documento3 páginasL-Robot Seguidor de Luz - 112215applefirt349Aún no hay calificaciones
- Puente H y SimulaciónDocumento4 páginasPuente H y Simulaciónlopezgerar719Aún no hay calificaciones
- Robot Seguidor de Lineas Negras Con 6 TransistoresDocumento4 páginasRobot Seguidor de Lineas Negras Con 6 TransistoresJkarlos ZLeon67% (3)
- t3 Sensores E1Documento7 páginast3 Sensores E1Victor BojorquezAún no hay calificaciones
- Laboratorio Seguidor de LineaDocumento16 páginasLaboratorio Seguidor de LineaDaniel ZapataAún no hay calificaciones
- Robot Seguidor de Lineas: "Robolin"Documento3 páginasRobot Seguidor de Lineas: "Robolin"javierAún no hay calificaciones
- Practicas ElectronicaDocumento13 páginasPracticas ElectronicacarabantesAún no hay calificaciones
- HallDocumento4 páginasHalljhon jairo gomez solanoAún no hay calificaciones
- Sensores de Infrarrojos CNY70 HUMEDADDocumento38 páginasSensores de Infrarrojos CNY70 HUMEDADRuben Peña AlfonsoAún no hay calificaciones
- Seguidores de LineaDocumento2 páginasSeguidores de Lineapardo_2020Aún no hay calificaciones
- Matlab. Rectificador de Media Onda.Documento3 páginasMatlab. Rectificador de Media Onda.Victor NatividadAún no hay calificaciones
- Carro Seguidor de LuzDocumento19 páginasCarro Seguidor de LuzIvan Saldaña100% (1)
- Reporte de Practica 3Documento2 páginasReporte de Practica 3daniel.electri.atypAún no hay calificaciones
- Seguidor de Lineas AnalogicoDocumento5 páginasSeguidor de Lineas Analogicodaniel ornelasAún no hay calificaciones
- Practica Nº4 Comprobacion de BobinasDocumento8 páginasPractica Nº4 Comprobacion de BobinasFABRICIO DANILO RIOFRIO SANCHEZAún no hay calificaciones
- Actividad 09Documento12 páginasActividad 09jcsaadfAún no hay calificaciones
- PROYECTO: Seguidor de LineaDocumento6 páginasPROYECTO: Seguidor de LineaJuan Pablo OvalleAún no hay calificaciones
- Informe Final MicrocontroladoresDocumento23 páginasInforme Final MicrocontroladoresDiego Rosado MálagaAún no hay calificaciones
- Carrito Con TransistoresDocumento8 páginasCarrito Con TransistoresCarlos CoronelAún no hay calificaciones
- TallerDocumento5 páginasTallerOSCAR FERNEY VARGAS HOLGUINAún no hay calificaciones
- Informe de Configuraciones Pull Down Y Pull Up CNY70Documento4 páginasInforme de Configuraciones Pull Down Y Pull Up CNY70Jackson Javier MendezAún no hay calificaciones
- Pruebas Mecanicas AutomotricesDocumento9 páginasPruebas Mecanicas AutomotricesAldo HernándezAún no hay calificaciones
- IyC PE UII PEREZVILLAGOMEZJOSEGUADALUPE PDFDocumento32 páginasIyC PE UII PEREZVILLAGOMEZJOSEGUADALUPE PDFJose Guadalupe Perez VillagomezAún no hay calificaciones
- Un Carrito Seguidor de Linea SencilloDocumento17 páginasUn Carrito Seguidor de Linea SencilloAraceli Gutierrez CampuzanoAún no hay calificaciones
- Proyecto Final ElectrónicosDocumento13 páginasProyecto Final ElectrónicosarizelyAún no hay calificaciones
- Electrotecnia Robot Seguidor de LuzDocumento5 páginasElectrotecnia Robot Seguidor de Luzerika jimenaAún no hay calificaciones
- Robots Seguidores de LíneaDocumento7 páginasRobots Seguidores de LíneaalexissistemasAún no hay calificaciones
- Robot Seguidor de LineaDocumento4 páginasRobot Seguidor de Lineacheco66666Aún no hay calificaciones
- Solucionario Mecanica de Fluidos Merle C Potter David C Wiggert 3edDocumento8 páginasSolucionario Mecanica de Fluidos Merle C Potter David C Wiggert 3edjorge isaacAún no hay calificaciones
- Practica nr3 ElectronicaDocumento10 páginasPractica nr3 ElectronicaJohel GarciaAún no hay calificaciones
- Informe de DiodosDocumento10 páginasInforme de DiodosDIEGO ARMANDO COLQUE BAUTISTAAún no hay calificaciones
- Aplicaciones Con TransistoresDocumento8 páginasAplicaciones Con TransistoresRaul ChoqueAún no hay calificaciones
- Robot Pic16f84Documento8 páginasRobot Pic16f84tony_flores_11Aún no hay calificaciones
- Gonzales Vicharra-20180213BDocumento2 páginasGonzales Vicharra-20180213BMauricio Gonzales VicharraAún no hay calificaciones
- Proyecto de Tecnologia 1Documento5 páginasProyecto de Tecnologia 1Randy LikeElectroAún no hay calificaciones
- Introduccion Informe 2Documento2 páginasIntroduccion Informe 2WeslyVillamilAún no hay calificaciones
- Robot Que Sigue La LuzDocumento5 páginasRobot Que Sigue La LuzwillAún no hay calificaciones
- Laboratorio 02 Curvas Caracteristicas de TransistoresDocumento4 páginasLaboratorio 02 Curvas Caracteristicas de Transistoressharingan009Aún no hay calificaciones
- Laboratorio 01 Curvas Del TransistorDocumento8 páginasLaboratorio 01 Curvas Del Transistorsharingan009Aún no hay calificaciones
- Universidad Politecnica Salesiana Seguidor de LineaDocumento11 páginasUniversidad Politecnica Salesiana Seguidor de LineaAndrea ConstanteAún no hay calificaciones
- UntitledDocumento2 páginasUntitledNoelia Cid ZafraAún no hay calificaciones
- Joaquín LucariniDocumento34 páginasJoaquín LucariniRafael Olalde QuintanaAún no hay calificaciones
- Formato Check List Vias y Salidas de EmergenciasDocumento1 páginaFormato Check List Vias y Salidas de EmergenciasKaren DonosoAún no hay calificaciones
- Catanimacion 2010Documento70 páginasCatanimacion 2010Alejandro León100% (1)
- Jackie BrownDocumento13 páginasJackie BrownJohan RoncancioAún no hay calificaciones
- Ejercicios de Rehabilitación Neurocognitiva para Jhonny JimenezDocumento28 páginasEjercicios de Rehabilitación Neurocognitiva para Jhonny Jimenezvicente yayesAún no hay calificaciones
- Formatear Un Disco Duro Con Windows XPDocumento11 páginasFormatear Un Disco Duro Con Windows XPCharly FloVaAún no hay calificaciones
- Medidas Minimas ComedorDocumento4 páginasMedidas Minimas ComedorEtimi RodrickAún no hay calificaciones
- Obra de Teatro La Ratita PresumidaDocumento4 páginasObra de Teatro La Ratita PresumidaGannella DominguezAún no hay calificaciones
- Presentación 1Documento22 páginasPresentación 1Elkin y Cindy Durango castañedaAún no hay calificaciones
- Traducción de Interjecciones ItalianasDocumento243 páginasTraducción de Interjecciones ItalianasCody NguyenAún no hay calificaciones
- Patrones de Diversidad en Distintos Gradientes Altitudinales Reserva Colonso ChalupasDocumento4 páginasPatrones de Diversidad en Distintos Gradientes Altitudinales Reserva Colonso ChalupasAntony MestanzaAún no hay calificaciones
- Mujeres Al Borde de Un Ataque de NerviosDocumento3 páginasMujeres Al Borde de Un Ataque de NerviospuesporquesiAún no hay calificaciones
- Hoteles HibridosDocumento8 páginasHoteles HibridosSanty Gunter CachorroAún no hay calificaciones
- Actividad 3.4Documento3 páginasActividad 3.4Jesus andres DiazAún no hay calificaciones
- Hardware Vs SoftwareDocumento4 páginasHardware Vs SoftwareJeffryAún no hay calificaciones
- Cat Digital Etesa Jul 2021Documento33 páginasCat Digital Etesa Jul 2021Ernest Paan ÁlvarezAún no hay calificaciones
- Los Valores A Través Del BaileDocumento2 páginasLos Valores A Través Del Bailepsyky100% (1)
- IDEAS DE ALMUERZOS & CENAS - Mag ErrecabordeDocumento20 páginasIDEAS DE ALMUERZOS & CENAS - Mag Errecabordebianca rinaldiAún no hay calificaciones
- Reglamento Interno para El Campeonato Deportivo de "Padres de Familia"Documento5 páginasReglamento Interno para El Campeonato Deportivo de "Padres de Familia"seb kAún no hay calificaciones
- La Historia Sin Fin: PotterficsDocumento9 páginasLa Historia Sin Fin: PotterficscelestevampiriAún no hay calificaciones
- 2014 Elfos SilvanosDocumento16 páginas2014 Elfos SilvanosileniaAún no hay calificaciones
- AP 5to GradoDocumento2 páginasAP 5to GradoGiovanna PaoLitaAún no hay calificaciones
- Cuento La Ovejita NegraDocumento3 páginasCuento La Ovejita NegraEdgardo Cárdenas SandovalAún no hay calificaciones
- Guión de RadioDocumento3 páginasGuión de RadioAngel MoraAún no hay calificaciones
- Haciendo Musica Con Agua ArtesDocumento4 páginasHaciendo Musica Con Agua Arteszapachapa22Aún no hay calificaciones
- Canvas CerveceriaDocumento13 páginasCanvas CerveceriaAndrea SanchezAún no hay calificaciones