También podría gustarte
- Mecatrónica: modelado, simulación y control de sistemas físicosDe EverandMecatrónica: modelado, simulación y control de sistemas físicosAún no hay calificaciones
- Curso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoDe EverandCurso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoAún no hay calificaciones
- Trabajo Final VTOLDocumento12 páginasTrabajo Final VTOLpipe spAún no hay calificaciones
- 177-Texto Del Artículo-305-1-10-20190824Documento7 páginas177-Texto Del Artículo-305-1-10-20190824Felipe MoreraAún no hay calificaciones
- Scindirect EspañolDocumento15 páginasScindirect EspañolCarlosCharlsDLAún no hay calificaciones
- Msc. Ing. Oscar Alexander Bellón Hernández Docente Tiempo Completo Grupo de Investigación Gimac Ingeniería Mecatrónica Universidad de BoyacáDocumento13 páginasMsc. Ing. Oscar Alexander Bellón Hernández Docente Tiempo Completo Grupo de Investigación Gimac Ingeniería Mecatrónica Universidad de BoyacáJose BarreraAún no hay calificaciones
- Laboratorio 4 Control Lineal Control de Posición de Una Masa (Sistema de Poleas)Documento8 páginasLaboratorio 4 Control Lineal Control de Posición de Una Masa (Sistema de Poleas)danielw123Aún no hay calificaciones
- Sistemas de Control de Generadores Sincrónicos e Implementaciones en El EMTPATPDrawDocumento101 páginasSistemas de Control de Generadores Sincrónicos e Implementaciones en El EMTPATPDrawOscar GutierrezAún no hay calificaciones
- GP13 - Modelado de Sistemas Con Simulink-SimscapeDocumento8 páginasGP13 - Modelado de Sistemas Con Simulink-Simscapecolapse teiwinAún no hay calificaciones
- Proyecto FinalDocumento4 páginasProyecto FinaledwcaranAún no hay calificaciones
- MPC para Regulacion de Frecuencia en Turbinas EolicasDocumento146 páginasMPC para Regulacion de Frecuencia en Turbinas EolicasDario ArangoAún no hay calificaciones
- Dialnet AnalisisDeLaEstabilidadTransitoriaEnSistemasElectr 8901266Documento17 páginasDialnet AnalisisDeLaEstabilidadTransitoriaEnSistemasElectr 8901266joseAún no hay calificaciones
- Practica 2Documento9 páginasPractica 2Juan SaeterosAún no hay calificaciones
- Sistema #3. - Péndulo de FurutaDocumento8 páginasSistema #3. - Péndulo de FurutaSergioAugustoBaldeonAún no hay calificaciones
- Co st134 06Documento10 páginasCo st134 06EsmfAún no hay calificaciones
- FURUTADocumento8 páginasFURUTAcesar aguirreAún no hay calificaciones
- CONIMERA 2 - Función de Energía para Estabilidad Transitoria SEINDocumento12 páginasCONIMERA 2 - Función de Energía para Estabilidad Transitoria SEINbamanfredAún no hay calificaciones
- Modelado y SimulacionDocumento4 páginasModelado y SimulacionDianaCitlalliCeronAún no hay calificaciones
- ProyectoDocumento15 páginasProyectosebastianAún no hay calificaciones
- Tarea - N°1-SISTEMA DINÁMICODocumento15 páginasTarea - N°1-SISTEMA DINÁMICOCarlos DamiánAún no hay calificaciones
- 4 ModeladoDocumento30 páginas4 ModeladoIl Il Il IlAún no hay calificaciones
- Estabilizacindeunpnduloinvertidousando MPCy LQRDocumento8 páginasEstabilizacindeunpnduloinvertidousando MPCy LQRAle RQAún no hay calificaciones
- La Teoría Del Control Automático Aplicada Al Area de Ingeniería EléctricaDocumento18 páginasLa Teoría Del Control Automático Aplicada Al Area de Ingeniería EléctricaPAJUELO VALLE JONATHAN STEVENAún no hay calificaciones
- Metodologia Tarea4 PDFDocumento3 páginasMetodologia Tarea4 PDFhoolmanAún no hay calificaciones
- Analisis de Fuerzas 4 Barras PDFDocumento8 páginasAnalisis de Fuerzas 4 Barras PDFJulio Cesar Castillo DelgadoAún no hay calificaciones
- Bitácora de Aprendizaje UT-3++Documento34 páginasBitácora de Aprendizaje UT-3++FLAVIO CESAR SANCHEZ MARTINEZAún no hay calificaciones
- Analisis Cinemático y Dinámico de Mecanismo Biela-ManivelaDocumento13 páginasAnalisis Cinemático y Dinámico de Mecanismo Biela-ManivelaTomás LuraschiAún no hay calificaciones
- Modelamiento Matematico y Simulaci N de Un Motor DC Cardenas CarrilloDocumento5 páginasModelamiento Matematico y Simulaci N de Un Motor DC Cardenas Carrillojuan carlosAún no hay calificaciones
- Plantilla Reporte Electricidad y Magnetismo Ind 2022Documento5 páginasPlantilla Reporte Electricidad y Magnetismo Ind 2022Acosta Castillo Ximena AraceliAún no hay calificaciones
- Estudio de Estabilidad Transitoria Por El Método de La Función de Energía Transitoria Incorporando Los Modelos de Carga Estática No Lineales.Documento164 páginasEstudio de Estabilidad Transitoria Por El Método de La Función de Energía Transitoria Incorporando Los Modelos de Carga Estática No Lineales.Tavo ErgoAún no hay calificaciones
- Lab 6 CTR 2Documento4 páginasLab 6 CTR 2Felipe MoreraAún no hay calificaciones
- Funcion de Transferencia de Un Motor de C.D.Documento4 páginasFuncion de Transferencia de Un Motor de C.D.ɛɗuɑʀɗѳ cѳpɑʆcuɑAún no hay calificaciones
- Controladores en Redes Neuronales en El Control de Trayectoria de Manipuladores RobóticosDocumento5 páginasControladores en Redes Neuronales en El Control de Trayectoria de Manipuladores RobóticosChiseledPrawnAún no hay calificaciones
- Modelación, Simulación y Control de Un Levitador NeumáticoDocumento9 páginasModelación, Simulación y Control de Un Levitador NeumáticoAdalberto LazariniAún no hay calificaciones
- Artículo Final RevistaDocumento6 páginasArtículo Final Revistaluz PereiraAún no hay calificaciones
- Tema 3Documento28 páginasTema 3emdiazpuAún no hay calificaciones
- Proyecto Final Ing de Contol Clasico (Motor de CD)Documento32 páginasProyecto Final Ing de Contol Clasico (Motor de CD)Octavio Gómez100% (2)
- Control de Un Péndulo de Furuta en Modo GrúaDocumento6 páginasControl de Un Péndulo de Furuta en Modo Grúakarlosandres82Aún no hay calificaciones
- Monografia Ingeneirea de ControDocumento13 páginasMonografia Ingeneirea de ControCristian Chata ClarosAún no hay calificaciones
- Informe ControlDocumento11 páginasInforme ControlBryan CoboAún no hay calificaciones
- Silabo Mecanica GeneralDocumento6 páginasSilabo Mecanica Generalnaomi98Aún no hay calificaciones
- Análisis Dinámico de Estabilidad de Voltaje Usando ATPDocumento5 páginasAnálisis Dinámico de Estabilidad de Voltaje Usando ATPEduardo Tello del PinoAún no hay calificaciones
- Control AdaptativoDocumento14 páginasControl AdaptativoRenzo Zuñiga Castillo100% (1)
- Art 08Documento12 páginasArt 08Jesús OscoAún no hay calificaciones
- Modelacion de Sitemas MecanicosDocumento26 páginasModelacion de Sitemas MecanicosDario AbelAún no hay calificaciones
- Capitulo 1 Sistemas de ControlDocumento3 páginasCapitulo 1 Sistemas de ControlRonnie LoboAún no hay calificaciones
- ACT 1 MySSMDocumento12 páginasACT 1 MySSMRoque Alberto Orta CollazoAún no hay calificaciones
- Modelado No Lineal de Un Brazo HidráulicoDocumento9 páginasModelado No Lineal de Un Brazo HidráulicoElías Javier Azócar MambiéAún no hay calificaciones
- Actividad 5 ServomecanismosDocumento17 páginasActividad 5 Servomecanismosanalucia.guajardovrlAún no hay calificaciones
- Maq2 Cap 1Documento27 páginasMaq2 Cap 1Mr. LycalopexAún no hay calificaciones
- Desarrollo y Control de Un Pendulo de FurutaDocumento7 páginasDesarrollo y Control de Un Pendulo de FurutaHugo Junior Quispe ChaconAún no hay calificaciones
- 19 Analisis y Resultados Experimentales de Controladores deDocumento7 páginas19 Analisis y Resultados Experimentales de Controladores deAndresPrieto10Aún no hay calificaciones
- BalancinMotorHelice PDFDocumento15 páginasBalancinMotorHelice PDFSebastianAún no hay calificaciones
- Informe Laboratorio 2 - InstrumentaciónDocumento14 páginasInforme Laboratorio 2 - InstrumentaciónDaniel Esteban GonzálezAún no hay calificaciones
- Reporte 6 AF 6.Documento3 páginasReporte 6 AF 6.Paul AguilarAún no hay calificaciones
- Proyecto Integrador ULTIMO FinalDocumento16 páginasProyecto Integrador ULTIMO FinalSergio ArevaloAún no hay calificaciones
- Modelado y Control de Un UAVDocumento25 páginasModelado y Control de Un UAVdemo71Aún no hay calificaciones
- Capitulo 1 - Introducción Al Modelado de Sistemas Físicos - 2Documento14 páginasCapitulo 1 - Introducción Al Modelado de Sistemas Físicos - 2jorgecasaliniAún no hay calificaciones
- Capitulo 1Documento11 páginasCapitulo 1Javier MuñozAún no hay calificaciones
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Aún no hay calificaciones
- Cajetín UnalDocumento1 páginaCajetín UnalJorge Andres Montoya QuirozAún no hay calificaciones
- Calculos Perdidas Test 1Documento16 páginasCalculos Perdidas Test 1Jorge Andres Montoya QuirozAún no hay calificaciones
- EM1Documento2 páginasEM1Jorge Andres Montoya QuirozAún no hay calificaciones
- Informe Talentos UaODocumento3 páginasInforme Talentos UaOJorge Andres Montoya QuirozAún no hay calificaciones
- Calculos PerdidasDocumento39 páginasCalculos PerdidasJorge Andres Montoya QuirozAún no hay calificaciones
- Laboratorio ConductividadDocumento2 páginasLaboratorio ConductividadJorge Andres Montoya QuirozAún no hay calificaciones
- Variador de DiscosDocumento12 páginasVariador de DiscosJorge Andres Montoya Quiroz100% (1)
- Variador de Discos Múltiples PresentaciónDocumento11 páginasVariador de Discos Múltiples PresentaciónJorge Andres Montoya QuirozAún no hay calificaciones
- Algoritmo Cap 6 - Ejes, Cuñas y AcoplesDocumento24 páginasAlgoritmo Cap 6 - Ejes, Cuñas y AcoplesJorge Andres Montoya QuirozAún no hay calificaciones
- Incertidumbre Instrumentos de Medición PresiónDocumento2 páginasIncertidumbre Instrumentos de Medición PresiónJorge Andres Montoya QuirozAún no hay calificaciones
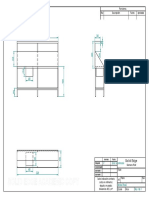
- Mesa FrigorificoDocumento1 páginaMesa FrigorificoIsmael FgAún no hay calificaciones
- Solucion Test01fluidos01 2015Documento3 páginasSolucion Test01fluidos01 2015Jorge Andres Montoya QuirozAún no hay calificaciones
- Informe Brazo HidráulicoDocumento13 páginasInforme Brazo HidráulicoJorge Andres Montoya QuirozAún no hay calificaciones
- Cajetín UnalDocumento1 páginaCajetín UnalJorge Andres Montoya QuirozAún no hay calificaciones
- MTR de Acero V320 38,6x1130-0011ET0318 - Factura 572798087 UnalDocumento1 páginaMTR de Acero V320 38,6x1130-0011ET0318 - Factura 572798087 UnalJorge Andres Montoya QuirozAún no hay calificaciones
- Laboratorio VTOLDocumento3 páginasLaboratorio VTOLJorge Andres Montoya QuirozAún no hay calificaciones
- Elementos de Maquinas II - Guia 2023Documento17 páginasElementos de Maquinas II - Guia 2023Jorge Andres Montoya QuirozAún no hay calificaciones
- Transformador Aislamiento 15kva Factor K1 SpectrumDocumento4 páginasTransformador Aislamiento 15kva Factor K1 SpectrumLuis LlbAún no hay calificaciones
- 2011 - Nivel Cero Verano FISICA B VERSION 0 Tercer ExamenDocumento3 páginas2011 - Nivel Cero Verano FISICA B VERSION 0 Tercer ExamenJordy IbarraAún no hay calificaciones
- Tipos de ViscosimetrosDocumento8 páginasTipos de ViscosimetrosKiara RamosAún no hay calificaciones
- Ahorro Energetico (Articulo)Documento10 páginasAhorro Energetico (Articulo)Areli CGAún no hay calificaciones
- Molaridad y NormalidadDocumento7 páginasMolaridad y NormalidadVictor JosuéAún no hay calificaciones
- Aire AcondicionadoDocumento43 páginasAire AcondicionadoCesar RuizAún no hay calificaciones
- Propiedades de Los GasesDocumento125 páginasPropiedades de Los GasesLuis R MoraAún no hay calificaciones
- LABORATORIO1Documento39 páginasLABORATORIO1luisAún no hay calificaciones
- Taller de MaterialesDocumento23 páginasTaller de MaterialesCalcule el caudal de agua que fluye a Través de una tubería de hierro galvanizado67% (3)
- Desarrollo de Un Arreglo Circular de Antenas Utilizando Herramientas de Electromagnetismo ComputacionalDocumento14 páginasDesarrollo de Un Arreglo Circular de Antenas Utilizando Herramientas de Electromagnetismo ComputacionalEnrique LopezAún no hay calificaciones
- Practica Vectores PDFDocumento11 páginasPractica Vectores PDFShiomara Matos100% (1)
- Dinamica Jesus Correa AyalaDocumento11 páginasDinamica Jesus Correa AyalaJesús CorreaAún no hay calificaciones
- Informe Descenso CrioscópicoDocumento12 páginasInforme Descenso CrioscópicoVALENTINA LÓPEZ PÉREZAún no hay calificaciones
- Ley de Ampere y Faraday - Fisica IIIDocumento15 páginasLey de Ampere y Faraday - Fisica IIIGabriel UribeAún no hay calificaciones
- Informe Final de Diseno de Fajas en V MezcladoraDocumento18 páginasInforme Final de Diseno de Fajas en V MezcladoraLUIS FRANCO GONZALO QUISPE HUANCAAún no hay calificaciones
- Análisis de Preguntas Icfes Matemática Periodo 4Documento14 páginasAnálisis de Preguntas Icfes Matemática Periodo 4olmesAún no hay calificaciones
- Energia TermoelectricaDocumento3 páginasEnergia TermoelectricaGonzalo FabriziohhAún no hay calificaciones
- Albert Einstein - James R. Newman - La Gran Idea de EinsteinDocumento14 páginasAlbert Einstein - James R. Newman - La Gran Idea de EinsteinRosa RestrepoAún no hay calificaciones
- Presentacion Limites y ContinuidadDocumento18 páginasPresentacion Limites y ContinuidadJuan José Matute GomescoelloAún no hay calificaciones
- Caso 2-3 Sistemas de EnfriamientoDocumento16 páginasCaso 2-3 Sistemas de Enfriamientoronald0% (1)
- Concepto de Vacio en FisicaDocumento4 páginasConcepto de Vacio en FisicaHector Bellido PalaciosAún no hay calificaciones
- Merged 2 Files 15-6-2020-20-49-44Documento25 páginasMerged 2 Files 15-6-2020-20-49-44sebas rojasAún no hay calificaciones
- Resolución Del Primer Examen de Fenómenos de TransporteDocumento6 páginasResolución Del Primer Examen de Fenómenos de TransporteingrossAún no hay calificaciones
- Estado General de DeformacionesDocumento13 páginasEstado General de DeformacionesDavid RovaAún no hay calificaciones
- Simetrías de Ondas PeriódicasDocumento8 páginasSimetrías de Ondas PeriódicasMauricio GaiborAún no hay calificaciones
- Experimento de Laboratorio Sobre Calor Latente y Capacidad Calorífica A Bajas TemperaturasDocumento8 páginasExperimento de Laboratorio Sobre Calor Latente y Capacidad Calorífica A Bajas Temperaturasdanilvac5697Aún no hay calificaciones
- Unidad 1. Principios de Análisis InstrumentalDocumento50 páginasUnidad 1. Principios de Análisis InstrumentalErikaAún no hay calificaciones
- Hoja Problemas Tema 2 2 PDFDocumento3 páginasHoja Problemas Tema 2 2 PDFhumbertoAún no hay calificaciones
- Lab N8Documento2 páginasLab N8Domenica ChisaguanoAún no hay calificaciones