También podría gustarte
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208De EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Aún no hay calificaciones
- Programación con lenguajes de guión en páginas web. IFCD0110De EverandProgramación con lenguajes de guión en páginas web. IFCD0110Aún no hay calificaciones
- PLC - Tarea 2Documento4 páginasPLC - Tarea 2yahirramirez0311Aún no hay calificaciones
- PLD9 Ruiz Guzmán BryanDocumento13 páginasPLD9 Ruiz Guzmán BryanBryan Ruiz GuzmánAún no hay calificaciones
- Tarea 2Documento3 páginasTarea 2LEONARDO ORANTESAún no hay calificaciones
- Tarea 2 PLCDocumento3 páginasTarea 2 PLCMiguel GuevaraAún no hay calificaciones
- LAB 07 - Aplicaciones Con Flip FlopsDocumento11 páginasLAB 07 - Aplicaciones Con Flip Flopsjorge.portugalAún no hay calificaciones
- Trabajo Colaborativo 3 Fisica ElectronicaDocumento13 páginasTrabajo Colaborativo 3 Fisica Electronicasandra garcia100% (1)
- Curso PLCDocumento10 páginasCurso PLCGerardo CasillasAún no hay calificaciones
- Eeit Eeit-419 FormatoalumnotrabajofinalDocumento6 páginasEeit Eeit-419 FormatoalumnotrabajofinalKenny Vega100% (1)
- Los Datos Analógicos PDFDocumento9 páginasLos Datos Analógicos PDFOswaldo D GuevaravAún no hay calificaciones
- Anexo 1 Formato PAPER - FINALDocumento3 páginasAnexo 1 Formato PAPER - FINALMaríale PolancoAún no hay calificaciones
- Lab N°6 Programación AnalógicaDocumento22 páginasLab N°6 Programación AnalógicaRenzo GonzalesAún no hay calificaciones
- Lectura de Variables Analogas en PLC S7300Documento8 páginasLectura de Variables Analogas en PLC S7300jorge diazAún no hay calificaciones
- Cronometro en VHDLDocumento29 páginasCronometro en VHDLAlejandro Gutierrez Márquez67% (3)
- Tipanluisa - Diego Proyecto Final Contador 0 - 99Documento11 páginasTipanluisa - Diego Proyecto Final Contador 0 - 99Roberto MurilloAún no hay calificaciones
- Práctica U3Documento15 páginasPráctica U3Aldo ArgudinAún no hay calificaciones
- Informe Laboratorio Digitales 3 Ingenieria Electronica UpcDocumento12 páginasInforme Laboratorio Digitales 3 Ingenieria Electronica UpcÂld-âîr ÂûrêlîjûsAún no hay calificaciones
- Afirmar Que Es Necesario Acondicionar Una Señal Análoga Como Entrada A Un PLCDocumento3 páginasAfirmar Que Es Necesario Acondicionar Una Señal Análoga Como Entrada A Un PLCDiana Ciendua50% (6)
- Contador Decimal DobleDocumento8 páginasContador Decimal Doblepolikarpa0% (1)
- Unidad 3 - Tarea 3 - Fisica ElectronicaDocumento4 páginasUnidad 3 - Tarea 3 - Fisica Electronicajavier andres menesesAún no hay calificaciones
- Tema 4Documento10 páginasTema 4Brenda Fernández FajardoAún no hay calificaciones
- Upo1 Sistemas DigitalesDocumento16 páginasUpo1 Sistemas DigitalesJoseph AndinoAún no hay calificaciones
- Micrologix 1100 AnalogicasDocumento27 páginasMicrologix 1100 AnalogicasFranco ZahirAún no hay calificaciones
- Previo 1Documento22 páginasPrevio 1Anel MendozaAún no hay calificaciones
- LAB 07 - Aplicaciones Con Flip FlopsDocumento9 páginasLAB 07 - Aplicaciones Con Flip FlopsYhojan Kennedy Flores ChipanaAún no hay calificaciones
- Investigación de Controlador Logico ProgamableDocumento9 páginasInvestigación de Controlador Logico ProgamableMarco FerrelAún no hay calificaciones
- Contadores, Temporizadores y Operaciones AritméticasDocumento3 páginasContadores, Temporizadores y Operaciones Aritméticasemanuel de jesus Garcia PerezAún no hay calificaciones
- Manual C - V CIRWATT BDocumento24 páginasManual C - V CIRWATT BSantiago PinedaAún no hay calificaciones
- LAB 07 - Aplicaciones Con Flip FlopsDocumento9 páginasLAB 07 - Aplicaciones Con Flip FlopsAntony GarambelAún no hay calificaciones
- 2.1.2 Guía Taller 2Documento11 páginas2.1.2 Guía Taller 2Ignacio RivAún no hay calificaciones
- Proyecto FinalDocumento34 páginasProyecto FinalMaximiliano Muñozcano DominguezAún no hay calificaciones
- COntador BinarioDocumento40 páginasCOntador BinarioKasey Turner0% (1)
- Maquina de Monedas z-80Documento2 páginasMaquina de Monedas z-80lorenzoAún no hay calificaciones
- Loid Loid-604 FormatoalumnotrabajofinalDocumento8 páginasLoid Loid-604 FormatoalumnotrabajofinalAlvaro LlontopAún no hay calificaciones
- Reloj DigitalDocumento18 páginasReloj DigitalRuben PadillaAún no hay calificaciones
- Conversores AD DADocumento5 páginasConversores AD DAAitor MiguezAún no hay calificaciones
- Reporte de Practica - HMIDocumento31 páginasReporte de Practica - HMIMario HernándezAún no hay calificaciones
- Temporizadores, Contadores y MemoriasDocumento4 páginasTemporizadores, Contadores y MemoriasEdilson ValderramaAún no hay calificaciones
- Informe I-O MicroDocumento33 páginasInforme I-O MicroSarai Orellana CifuentesAún no hay calificaciones
- Informe Interrupciones ExternasDocumento5 páginasInforme Interrupciones ExternasMh RlAún no hay calificaciones
- Contadores DigitalesDocumento7 páginasContadores DigitalesEspinosa Mendoza Diana Lucero0% (1)
- Informe Práctica MemoriasDocumento8 páginasInforme Práctica MemoriasKelvin MartínezAún no hay calificaciones
- Conexión Al PLC de Un EncoderDocumento11 páginasConexión Al PLC de Un EncoderJaime FuentesAún no hay calificaciones
- Retos MAQ IDocumento17 páginasRetos MAQ Icristopher oroscoAún no hay calificaciones
- Tema LazosDocumento9 páginasTema LazosFërnändä ToäquïzäAún no hay calificaciones
- Informe DataloggerDocumento13 páginasInforme DataloggeroswaldoAún no hay calificaciones
- Practica 1 - Semaforo Por Parpadeo Con Bit ACC Del TimerDocumento9 páginasPractica 1 - Semaforo Por Parpadeo Con Bit ACC Del TimerDavid SanAún no hay calificaciones
- Preparatorio 2Documento6 páginasPreparatorio 2CRISTIAN NAPOLEON GUERRON GUERRAAún no hay calificaciones
- Unidad 1 - Sistemas Numéricos Y Códigos: 1.1 IntroducciónDocumento10 páginasUnidad 1 - Sistemas Numéricos Y Códigos: 1.1 IntroducciónPerlaBritoAún no hay calificaciones
- Practica 2 - Ejercicios en VHDLDocumento17 páginasPractica 2 - Ejercicios en VHDLAlejandro StaveleyAún no hay calificaciones
- Actividad 2 PLCDocumento5 páginasActividad 2 PLComaralexxAún no hay calificaciones
- Actividad 2 PLCDocumento5 páginasActividad 2 PLComaralexxAún no hay calificaciones
- Proyecto 2 PLCDocumento12 páginasProyecto 2 PLCMarco Uriel Rios RamirezAún no hay calificaciones
- Informe de Laboratorio 2 de La Materia MicrocontroladoresDocumento12 páginasInforme de Laboratorio 2 de La Materia MicrocontroladoresDavid GomezAún no hay calificaciones
- Sistemas Digitales Tema 2Documento7 páginasSistemas Digitales Tema 2Dione Huaman BordaAún no hay calificaciones
- Ejercicios Tema 6Documento5 páginasEjercicios Tema 6Alfredo Mituy Okenve ObiangAún no hay calificaciones
- FOR0 Leysi05Documento6 páginasFOR0 Leysi05Leysi LopezAún no hay calificaciones
- Control y verificación de productos fabricados. FMEE0108De EverandControl y verificación de productos fabricados. FMEE0108Aún no hay calificaciones
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109De EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Aún no hay calificaciones
- Actividad 2. Analisis de ArmadurasDocumento3 páginasActividad 2. Analisis de ArmadurasMiguel GuevaraAún no hay calificaciones
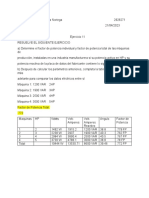
- Ejercicio 11 ElectricaDocumento2 páginasEjercicio 11 ElectricaMiguel GuevaraAún no hay calificaciones
- Act 5 MexicoDocumento1 páginaAct 5 MexicoMiguel GuevaraAún no hay calificaciones
- Act 3 Comprensión Lectora 3Documento2 páginasAct 3 Comprensión Lectora 3Miguel GuevaraAún no hay calificaciones
- 11.10.1 Packet Tracer - Design and Implement A VLSM Addressing Scheme - Es XL PDFDocumento2 páginas11.10.1 Packet Tracer - Design and Implement A VLSM Addressing Scheme - Es XL PDFJuliana Valencia JimenezAún no hay calificaciones
- Identificación NecesidadDocumento4 páginasIdentificación NecesidadJHON ESTEBAN RUIZ USECHE0% (1)
- Estándares Web W3CDocumento8 páginasEstándares Web W3CWilmer ZamoraAún no hay calificaciones
- Arreglar Alto Uso de Disco 100% Administrador Tareas Windows 10Documento9 páginasArreglar Alto Uso de Disco 100% Administrador Tareas Windows 10pabloAún no hay calificaciones
- Tutorias P58 - Horarios y EnlacesDocumento3 páginasTutorias P58 - Horarios y EnlacesDavis SisalemaAún no hay calificaciones
- Colección de Ejercicios 15. InterfacesDocumento7 páginasColección de Ejercicios 15. InterfacesDennis Perez ortizAún no hay calificaciones
- Brochure OracleDocumento2 páginasBrochure OracleGuido LevitAún no hay calificaciones
- Diagnóstico Inmobiliaria DMDocumento3 páginasDiagnóstico Inmobiliaria DMErika RiosAún no hay calificaciones
- Manual SIADEG - Requerimiento PDFDocumento22 páginasManual SIADEG - Requerimiento PDFMoises Cabrera FernandezAún no hay calificaciones
- Manual NexusDocumento18 páginasManual Nexusfelipe garciaAún no hay calificaciones
- TP 3Documento6 páginasTP 3Julieta SpadavecchiaAún no hay calificaciones
- Proyecto de Investigacion de Una Pagina Web de Un MunicipioDocumento37 páginasProyecto de Investigacion de Una Pagina Web de Un MunicipioDaniel Elias Huanca Macuri67% (3)
- Base Datos PreguntasDocumento12 páginasBase Datos Preguntascristian lopezAún no hay calificaciones
- Coordinador Departamento de Sistemas OKDocumento3 páginasCoordinador Departamento de Sistemas OKArmando Muñoz PaezAún no hay calificaciones
- Aspectos Fundamentales en La Gerencia ... Cción de Un Centro de InformáticaDocumento8 páginasAspectos Fundamentales en La Gerencia ... Cción de Un Centro de InformáticaMike Keivis Espinola AcostaAún no hay calificaciones
- UPS y Criterios de SelecciónDocumento72 páginasUPS y Criterios de SelecciónfernandoAún no hay calificaciones
- BITACORA DE PRACTICAS (Luis Enrique Beleño Mora)Documento16 páginasBITACORA DE PRACTICAS (Luis Enrique Beleño Mora)Luis Enrique Beleño MoraAún no hay calificaciones
- OK Ing Tecnologia Software Malla CurricularDocumento1 páginaOK Ing Tecnologia Software Malla CurricularZayuri SanchezzAún no hay calificaciones
- Proyecto de Grado ElectronicaDocumento119 páginasProyecto de Grado ElectronicaJonathan Lara TerrazasAún no hay calificaciones
- Laboratorio Sesion 12Documento9 páginasLaboratorio Sesion 12ElvisvegaAún no hay calificaciones
- Arduino MenuDocumento14 páginasArduino MenuCarlos SilvaAún no hay calificaciones
- Laboratorio #03: Técnicas de Comprensión Lectora Puntos: Estudiante (S)Documento4 páginasLaboratorio #03: Técnicas de Comprensión Lectora Puntos: Estudiante (S)Yorlin Joan Encarnacion EugenioAún no hay calificaciones
- Tarea 04Documento3 páginasTarea 04Toby MessiAún no hay calificaciones
- Delitos InformaticosDocumento36 páginasDelitos InformaticosGiordano Vasquez100% (1)
- Telegestión AbonadosDocumento14 páginasTelegestión AbonadosAnaraida Garcia BaigorriAún no hay calificaciones
- Diseño de Un Sistema de Gestion de Procesos para El Area de Embotellado de Cerveceria Nacional C N Planta QuitoDocumento128 páginasDiseño de Un Sistema de Gestion de Procesos para El Area de Embotellado de Cerveceria Nacional C N Planta QuitoJaime VargasAún no hay calificaciones
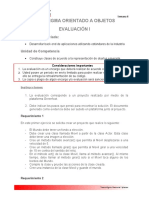
- Paradigma Orientado A Objetos Evaluación I: Competencia AsociadaDocumento4 páginasParadigma Orientado A Objetos Evaluación I: Competencia Asociadarobert canalesAún no hay calificaciones
- 69 - TriggersDocumento11 páginas69 - TriggersgbevoloAún no hay calificaciones
- Imperio Digital Guia Paso A PasoDocumento34 páginasImperio Digital Guia Paso A Pasosuxemilianmaicol610Aún no hay calificaciones
- Toneref II ARKDocumento2 páginasToneref II ARKDaniel F. Guerrero P.Aún no hay calificaciones