0% encontró este documento útil (0 votos)
120 vistas14 páginasDiseño y Análisis de Levas en Mecánica
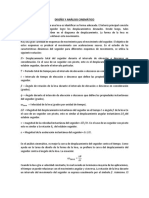
El documento presenta el análisis de mecanismos de una leva mediante el diseño de su perfil geométrico. Se calculan parámetros como la velocidad angular, los intervalos de tiempo y ángulos para satisfacer diferentes movimientos. Luego, se construye la tabla de coordenadas paramétricas para generar la forma de la leva usando ecuaciones específicas.
Cargado por
Luis Daniel Barraza MartinezDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
0% encontró este documento útil (0 votos)
120 vistas14 páginasDiseño y Análisis de Levas en Mecánica
El documento presenta el análisis de mecanismos de una leva mediante el diseño de su perfil geométrico. Se calculan parámetros como la velocidad angular, los intervalos de tiempo y ángulos para satisfacer diferentes movimientos. Luego, se construye la tabla de coordenadas paramétricas para generar la forma de la leva usando ecuaciones específicas.
Cargado por
Luis Daniel Barraza MartinezDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd