También podría gustarte
- Análisis de circuitos eléctricos Estado estableDe EverandAnálisis de circuitos eléctricos Estado estableCalificación: 5 de 5 estrellas5/5 (8)
- Solucionario de QuimicaDocumento16 páginasSolucionario de QuimicaEDWIN ALEXANDER HUERTAS CUEVA100% (8)
- Reporte Tecnico Tortilleria La Mejor PDFDocumento29 páginasReporte Tecnico Tortilleria La Mejor PDFFrancisco Gómez Cárdenas100% (1)
- Tiro 2Documento14 páginasTiro 2Osvaldo Lebuy100% (1)
- Rapel EspecialidadDocumento28 páginasRapel EspecialidadIsmael Lopez Balcazar100% (1)
- Foro # 1 Semana #3 MatematicasDocumento2 páginasForo # 1 Semana #3 MatematicasZARY VIVIANA OSORIO ESCOBARAún no hay calificaciones
- Actividad de Puntos Evaluables - Escenario 6 - SEGUNDO BLOQUE-CIENCIAS BASICAS - ESTADISTICA IDocumento7 páginasActividad de Puntos Evaluables - Escenario 6 - SEGUNDO BLOQUE-CIENCIAS BASICAS - ESTADISTICA IGeovanny AvilaAún no hay calificaciones
- 4ta Practica - Maquinas MarinasDocumento19 páginas4ta Practica - Maquinas MarinasLevi SotoAún no hay calificaciones
- Antologia Practicas - Gámez Salazar Juan ErnestoDocumento42 páginasAntologia Practicas - Gámez Salazar Juan ErnestoJUAN ERNESTO GAMEZ SALAZARAún no hay calificaciones
- Manual de RapelDocumento11 páginasManual de RapelAdrian Vertiz Rodriguez100% (1)
- Transportadores de CadenaDocumento59 páginasTransportadores de CadenaVictor Terrones43% (7)
- Tipos de AcoplamientosDocumento10 páginasTipos de AcoplamientosYaguacopAún no hay calificaciones
- P2 - Las Diferentes Técnicas de FrenadoDocumento12 páginasP2 - Las Diferentes Técnicas de FrenadoNinaAún no hay calificaciones
- Cables de Acero FinalDocumento65 páginasCables de Acero FinalDebray Rodriguez EsquivelAún no hay calificaciones
- Informe Calculo Puentes ColgantesDocumento19 páginasInforme Calculo Puentes ColgantesAnonymous 6w5SkeAún no hay calificaciones
- Monografia de Dibujo 2Documento18 páginasMonografia de Dibujo 2PICHILINGUE ESENARRO RUBEN MARTINAún no hay calificaciones
- Nudos Basicos de RescateDocumento16 páginasNudos Basicos de Rescateadriana gonzalezAún no hay calificaciones
- Resortes de LáminasDocumento4 páginasResortes de Láminasjosue50% (2)
- AmoladoraDocumento49 páginasAmoladoraLenin RomeroAún no hay calificaciones
- 3.4 Accesorios para Las Actividades PortuariasDocumento19 páginas3.4 Accesorios para Las Actividades PortuariasJoaquinBarcelataAún no hay calificaciones
- Grupo 8 Objetivos de La Bobinadora William y JohnnyDocumento19 páginasGrupo 8 Objetivos de La Bobinadora William y JohnnyAndrew CalderónAún no hay calificaciones
- Transportadores de CadenaDocumento38 páginasTransportadores de CadenaMiguel OrtizAún no hay calificaciones
- Trabajo 2Documento20 páginasTrabajo 2Laura FalcónAún no hay calificaciones
- 15 Nudos para Trabajos VerticalesDocumento11 páginas15 Nudos para Trabajos VerticalesURCOBONAún no hay calificaciones
- Act. 2.1 Puertos Marítimos (Sifuentes Popoca Mariana)Documento22 páginasAct. 2.1 Puertos Marítimos (Sifuentes Popoca Mariana)Mariana Sifuentes PopocaAún no hay calificaciones
- Normativa de Equipos de MontanaDocumento14 páginasNormativa de Equipos de MontanaArnold RamirezAún no hay calificaciones
- Miembros Sujetos A TensionDocumento20 páginasMiembros Sujetos A TensionCitlalli RendonAún no hay calificaciones
- ANCLAJESDocumento22 páginasANCLAJESRenzoJairSaraviaAlvaradoAún no hay calificaciones
- 15 Nudos para Trabajos Verticales IDocumento18 páginas15 Nudos para Trabajos Verticales IedmundoAún no hay calificaciones
- Granvertical - 15 NudosDocumento12 páginasGranvertical - 15 NudosMiguel Saucedo PalominoAún no hay calificaciones
- Mec 264 Los Elementos de Transmision Por CadenasDocumento21 páginasMec 264 Los Elementos de Transmision Por CadenasAlexander Cadena HumnerAún no hay calificaciones
- Anclaje Gatos Hidraulicos DuctosDocumento24 páginasAnclaje Gatos Hidraulicos DuctosFrancis PortilloAún no hay calificaciones
- Pi 15 01 02Documento31 páginasPi 15 01 02Anonymous APWpq4EAún no hay calificaciones
- Izaje MineroDocumento52 páginasIzaje MineroFredy Cordova Tahua100% (3)
- Tipos de Anclajes para Concreto PresforzadoDocumento12 páginasTipos de Anclajes para Concreto PresforzadoKevin Ever Mamani Yana67% (3)
- Elementos FlexiblesDocumento21 páginasElementos FlexiblesIng Orlando Sanchez NamoradoAún no hay calificaciones
- Cuestionario Correas en VDocumento9 páginasCuestionario Correas en VJusy Mara Naranjo ArtunduagaAún no hay calificaciones
- Servicios Mineros - Curso CompletoDocumento121 páginasServicios Mineros - Curso CompletoSalvador Gómez CalderónAún no hay calificaciones
- 15 Nudos para Trabajos VerticalesDocumento11 páginas15 Nudos para Trabajos VerticalesTrabalho VerticalAún no hay calificaciones
- Lección N°4 Sist. de AnclajesDocumento25 páginasLección N°4 Sist. de Anclajespedro baezAún no hay calificaciones
- Piques-Circulares Diciembre 2016 ListoDocumento31 páginasPiques-Circulares Diciembre 2016 ListojoseAún no hay calificaciones
- Estructuras Especiales - ArcosDocumento31 páginasEstructuras Especiales - ArcosKevin Fausto Ramos EstradaAún no hay calificaciones
- Informe 1 ManufacturaDocumento18 páginasInforme 1 ManufacturaOshin LlacctaAún no hay calificaciones
- Cables Mecánicos. AplicacionesDocumento15 páginasCables Mecánicos. AplicacionesSunny CrossAún no hay calificaciones
- Métodos de PretensadoDocumento16 páginasMétodos de PretensadoClaudio AlarcónAún no hay calificaciones
- Sistemas de Amarre y FondeoDocumento26 páginasSistemas de Amarre y FondeowvcentenoAún no hay calificaciones
- Poste San DoDocumento12 páginasPoste San DoAlonso RSAún no hay calificaciones
- Cercha MineraDocumento16 páginasCercha MineratoledocadillomarioAún no hay calificaciones
- 15 Nudos para Trabajos en AlturasDocumento6 páginas15 Nudos para Trabajos en Alturastigres451997Aún no hay calificaciones
- Informe de Calculo II REMEDIALDocumento28 páginasInforme de Calculo II REMEDIALraul cabanillasAún no hay calificaciones
- Tema 5 Amarras y Defensas PortuariasDocumento18 páginasTema 5 Amarras y Defensas Portuariaskillthenois420Aún no hay calificaciones
- Materiales en Las PiezasDocumento16 páginasMateriales en Las PiezasGraterol Jonathan AntonioAún no hay calificaciones
- Dokumen - Tips Izaje-MineroDocumento52 páginasDokumen - Tips Izaje-Minerocelso andradeAún no hay calificaciones
- Resortes MonografiaDocumento6 páginasResortes MonografiaLimberg Laura SantosAún no hay calificaciones
- MANUAL Cabulleria SARDocumento18 páginasMANUAL Cabulleria SARJose MamaniAún no hay calificaciones
- Herramientas Del OficioDocumento6 páginasHerramientas Del Oficiothomas gallardoAún no hay calificaciones
- Cables Cadenas GuayasDocumento9 páginasCables Cadenas GuayasLuis R MalavéAún no hay calificaciones
- Resorte Helicoidal de TorsionDocumento21 páginasResorte Helicoidal de TorsionJoan IjeiAún no hay calificaciones
- Sistema de Izaje en Mineria SubterraneaDocumento38 páginasSistema de Izaje en Mineria SubterraneaPiterMonzonMauricioAún no hay calificaciones
- Sistema de Izaje en Mineria SubterraneaDocumento38 páginasSistema de Izaje en Mineria SubterraneaBryan Balta LesamaAún no hay calificaciones
- Fuente WidlarDocumento13 páginasFuente WidlarLuis Venegas PAún no hay calificaciones
- Historia de La ElectricidadDocumento13 páginasHistoria de La ElectricidadMäRá NärvåëzAún no hay calificaciones
- Cwi Metric BoeDocumento83 páginasCwi Metric BoePaul Miranda GuzmanAún no hay calificaciones
- La Estructura de La MateriaDocumento15 páginasLa Estructura de La MateriaTomas TjorAún no hay calificaciones
- Metalurgia y Tratamiento de Las Aleaciones Aluminio SilicioDocumento56 páginasMetalurgia y Tratamiento de Las Aleaciones Aluminio SilicioSalvador Tovar FranciscoAún no hay calificaciones
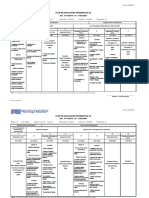
- Plan de Evaluación Informática (2) - IUPSM 2019Documento3 páginasPlan de Evaluación Informática (2) - IUPSM 2019Hari RamírezAún no hay calificaciones
- SentenciasDocumento21 páginasSentenciasJose Luis Prieto VarelaAún no hay calificaciones
- CAIDALIBREDocumento3 páginasCAIDALIBREJUAN SEBASTIAN VARGAS PEREZAún no hay calificaciones
- La Multiplicación y El Pop ItDocumento3 páginasLa Multiplicación y El Pop ItLele Guz RodAún no hay calificaciones
- ENTROPIA1Documento4 páginasENTROPIA1luisdaviddiazcastillo09Aún no hay calificaciones
- Texto Guía Estadística Administrativa: Carrera Administración de EmpresasDocumento13 páginasTexto Guía Estadística Administrativa: Carrera Administración de EmpresasEddy Josue Oyola NicasioAún no hay calificaciones
- Informe de Moldeo y ColadaDocumento22 páginasInforme de Moldeo y ColadakevinAún no hay calificaciones
- Gua Nueva Introduccin A La Estadstica v2021Documento58 páginasGua Nueva Introduccin A La Estadstica v2021Sonia FruminAún no hay calificaciones
- Reporte de Práctica 3.fermentación de CarbohidratosDocumento9 páginasReporte de Práctica 3.fermentación de CarbohidratosSANDRA TORRES MARQUEZAún no hay calificaciones
- Villanueva Pruneda PDFDocumento247 páginasVillanueva Pruneda PDFdamguirre64Aún no hay calificaciones
- Amplificadores RF de PotenciaDocumento10 páginasAmplificadores RF de PotenciaoldjanusAún no hay calificaciones
- Reseña Histórica de La Investigación de OperacionesDocumento11 páginasReseña Histórica de La Investigación de OperacionesJohan Batista BastidasAún no hay calificaciones
- Informe de Recristalizacion 1.Documento3 páginasInforme de Recristalizacion 1.braulio tobarAún no hay calificaciones
- Taller de A DescriptivaDocumento3 páginasTaller de A DescriptivaKaren Valencia0% (1)
- Transito de AvenidasDocumento30 páginasTransito de AvenidasDarwinJC100% (3)
- Ingenieria de La CalidadDocumento30 páginasIngenieria de La CalidadEdna Gabriela Ceja Silva100% (1)
- MathcadDocumento13 páginasMathcadcarlosAún no hay calificaciones
- G.e.p.nº3 (Cinematica) 2015Documento8 páginasG.e.p.nº3 (Cinematica) 2015GabrielDehnerAún no hay calificaciones
- Anexo 1 Especificaciones Tecnicas Im30-1239 Sellos y Bombas FlowserveDocumento24 páginasAnexo 1 Especificaciones Tecnicas Im30-1239 Sellos y Bombas FlowserveCristian Jhair PerezAún no hay calificaciones
- Características de Los GasesDocumento3 páginasCaracterísticas de Los GasesROYER FLORES100% (1)
- ReGresion MultipleDocumento36 páginasReGresion MultipleMarco BenitesAún no hay calificaciones