También podría gustarte
- Ejercicios sobre elasticidad y resistencia de materialesDe EverandEjercicios sobre elasticidad y resistencia de materialesAún no hay calificaciones
- 1 Modelo Simulacion MotorDCDocumento3 páginas1 Modelo Simulacion MotorDCgonzalo gonzales quispeAún no hay calificaciones
- Curso moderno de máquinas eléctricas rotativas. Tomo II: Máquinas de corriente continuaDe EverandCurso moderno de máquinas eléctricas rotativas. Tomo II: Máquinas de corriente continuaAún no hay calificaciones
- 1 Modelo Simulacion MotorDCDocumento3 páginas1 Modelo Simulacion MotorDCAntony MartinAún no hay calificaciones
- Lab 6 - Circuitos en PARALELODocumento7 páginasLab 6 - Circuitos en PARALELOGustavo DoranteAún no hay calificaciones
- Control de turbina eólicaDocumento12 páginasControl de turbina eólicaJorge Alberto Palacios100% (1)
- Practica 1Documento21 páginasPractica 1alex garciaAún no hay calificaciones
- Descripción de Actividades Proyecto El Tropezón - AgsaDocumento42 páginasDescripción de Actividades Proyecto El Tropezón - AgsaXiomara Zea EspitiaAún no hay calificaciones
- LA MAQUINA DC - Lab N°5Documento13 páginasLA MAQUINA DC - Lab N°5zafra25Aún no hay calificaciones
- Práctica 2Documento2 páginasPráctica 2David Felipe Calvache DiazAún no hay calificaciones
- Guìa Ext. Fìsica - Cod - 976Documento15 páginasGuìa Ext. Fìsica - Cod - 976santiago martinez bocanegraAún no hay calificaciones
- SCR Malla de DisparoDocumento2 páginasSCR Malla de DisparoANDY MIGUEL PANTOJA ATENCIOAún no hay calificaciones
- Laboratorio - Analisis de Circuitos Practica 1Documento5 páginasLaboratorio - Analisis de Circuitos Practica 1Nicholas DavisAún no hay calificaciones
- Máquinas eléctricas y su solución (B.L. Theraja y A.K. TherajaDocumento303 páginasMáquinas eléctricas y su solución (B.L. Theraja y A.K. TherajaPAVEL BENJAMIN GARCIA PATINOAún no hay calificaciones
- APELLIDOS, NOMBRE: ........................................................................... T Bien: T MalDocumento3 páginasAPELLIDOS, NOMBRE: ........................................................................... T Bien: T MalLaura Botella GarcíaAún no hay calificaciones
- Maquinas Electricas y Su Solucion.Documento303 páginasMaquinas Electricas y Su Solucion.Angely Escarfuller100% (1)
- Problemas 30.8 y 30.9 Voltc3admetro 25junio20Documento6 páginasProblemas 30.8 y 30.9 Voltc3admetro 25junio20Yoana Abigail Campos NavarreteAún no hay calificaciones
- Informe Motor DahlanderDocumento9 páginasInforme Motor DahlanderDiegoFernandoRojasTorres100% (1)
- Circuito Basico de Disparo SCRDocumento4 páginasCircuito Basico de Disparo SCRZenón MchAún no hay calificaciones
- Uan Evaluacion 4to Corte Smandoycontrol FimebDocumento9 páginasUan Evaluacion 4to Corte Smandoycontrol Fimebalejandratorra20Aún no hay calificaciones
- Practica7 ctrlEnergiaSCR (E2)Documento3 páginasPractica7 ctrlEnergiaSCR (E2)Andres CaudilloAún no hay calificaciones
- Cal Culo S MotorDocumento2 páginasCal Culo S MotorCesar PatacheAún no hay calificaciones
- Practica 1 Sincronas Ime FescDocumento8 páginasPractica 1 Sincronas Ime FescDiego RGAún no hay calificaciones
- Modelación EQPDocumento19 páginasModelación EQPEddyAún no hay calificaciones
- Curso Electricidad AvanzadaDocumento22 páginasCurso Electricidad AvanzadacempoalliAún no hay calificaciones
- Actividad Práctica #2Documento5 páginasActividad Práctica #2Yuli QuelcaAún no hay calificaciones
- 13.-Analisis de Motores Electricos (Sergio Aguilar)Documento29 páginas13.-Analisis de Motores Electricos (Sergio Aguilar)Ventas MVitalAún no hay calificaciones
- Taller 4Documento1 páginaTaller 4CamiloNogueraRiascosAún no hay calificaciones
- Lab 2 Medición de Tensión y Resistencias EléctricasdoriginalocxDocumento9 páginasLab 2 Medición de Tensión y Resistencias EléctricasdoriginalocxAlexander Chahua100% (1)
- P8 Conversion AC-ACDocumento10 páginasP8 Conversion AC-ACJose Gregorio Osuna QuinteroAún no hay calificaciones
- Control de Velocidad de Un Motor de CC en Lazo CerradoDocumento18 páginasControl de Velocidad de Un Motor de CC en Lazo CerradoGonzaGoglioAún no hay calificaciones
- EXAMENDocumento5 páginasEXAMENTeddy Hugo PboAún no hay calificaciones
- Sesion1 Nociones de Estabilidad SEPsDocumento35 páginasSesion1 Nociones de Estabilidad SEPsAngy Bravo OrtegaAún no hay calificaciones
- ControlDocumento10 páginasControljosedavid0115100% (1)
- 11 - B A N - Tecnologia Informatica - GUIA 1Documento8 páginas11 - B A N - Tecnologia Informatica - GUIA 1Jose Aristobulo Gonzalez FlorianAún no hay calificaciones
- Preinforme 1Documento3 páginasPreinforme 1meistehaft270Aún no hay calificaciones
- Informe 2 Electrotecnia LaboratorioDocumento6 páginasInforme 2 Electrotecnia LaboratorioKatherine Restrepo VelezAún no hay calificaciones
- Reporte Practica 1Documento10 páginasReporte Practica 1Victor Ivan Andrade PradoAún no hay calificaciones
- Laboratorio N25 EL MOTOR EN SERIE CDDocumento7 páginasLaboratorio N25 EL MOTOR EN SERIE CDcaguanonatalyAún no hay calificaciones
- Laboratorio Experimental #04. Reconocimiento y Comparación de Resistores. Electricidad y Magneismo. Ciclo 2023-2Documento10 páginasLaboratorio Experimental #04. Reconocimiento y Comparación de Resistores. Electricidad y Magneismo. Ciclo 2023-2Alan SanchezAún no hay calificaciones
- Lab de Circuitos Practica 3Documento5 páginasLab de Circuitos Practica 3angello RomanAún no hay calificaciones
- Experimento 6 Motor DC - 003Documento7 páginasExperimento 6 Motor DC - 003Sergio Andres MoraAún no hay calificaciones
- Vol 2 SPA - Ver OpenlabDocumento132 páginasVol 2 SPA - Ver OpenlabcuracauprintAún no hay calificaciones
- Circuito Equivalente, Perdidas, Flujo de Potencia y Eficiencia de Las Máquinas Asíncronas o de Inducción TrifásicasDocumento46 páginasCircuito Equivalente, Perdidas, Flujo de Potencia y Eficiencia de Las Máquinas Asíncronas o de Inducción TrifásicasRubensaiD100% (1)
- Practica #1 Maquinas de Corriente DirectaDocumento9 páginasPractica #1 Maquinas de Corriente DirectaJorge Daniel MercadoAún no hay calificaciones
- Lab01 Grupo11 PDFDocumento7 páginasLab01 Grupo11 PDFdaiki takumiAún no hay calificaciones
- Medicion de La Tension Corriente Potencia THD (Final)Documento7 páginasMedicion de La Tension Corriente Potencia THD (Final)Francois Zavaleta100% (1)
- 17 Dispositivos de Disparo Ujt y PutDocumento9 páginas17 Dispositivos de Disparo Ujt y PutRicardo LopezAún no hay calificaciones
- S06.s6 - GUIA N°1-100000I73N-Análisis de Circuitos EléctricosDocumento6 páginasS06.s6 - GUIA N°1-100000I73N-Análisis de Circuitos EléctricosJoel RodrigoAún no hay calificaciones
- Cuestionario 2Documento122 páginasCuestionario 2WilliamAún no hay calificaciones
- MotAsincTrifásicoDocumento14 páginasMotAsincTrifásicoMARTIN RENE ORTEGAAún no hay calificaciones
- Practica 1 - RCLDocumento10 páginasPractica 1 - RCLEdson JoelAún no hay calificaciones
- Practica 4 - 2.2 - Aplicacion de Transistor BJT - Leonardo Palma Forero - Grupo 141.Documento3 páginasPractica 4 - 2.2 - Aplicacion de Transistor BJT - Leonardo Palma Forero - Grupo 141.Leo Leo PalmaAún no hay calificaciones
- Control de velocidad de motores de CADocumento74 páginasControl de velocidad de motores de CAAlessio ShooterAún no hay calificaciones
- TF - 25-Kva-EpeDocumento2 páginasTF - 25-Kva-EpeGeorge Benny Miranda ArrunateguiAún no hay calificaciones
- Informe de Física II - 4 - Resistores en ParaleloDocumento6 páginasInforme de Física II - 4 - Resistores en ParaleloFernando AndersAún no hay calificaciones
- Guia de QuintoDocumento4 páginasGuia de QuintoYisbell Andrea PerezAún no hay calificaciones
- Disparo SCRDocumento5 páginasDisparo SCRpuntoexactoAún no hay calificaciones
- Trabajo MotoresDocumento11 páginasTrabajo MotoresDiego CornejoAún no hay calificaciones
- Frenado DinamicoDocumento6 páginasFrenado DinamicoMildred ValenciaAún no hay calificaciones
- Lab06 MotorDCDocumento13 páginasLab06 MotorDCEmanuel Josue Alejandro CentenoAún no hay calificaciones
- Lab 7 Configuración Del DAQDocumento14 páginasLab 7 Configuración Del DAQEmanuel Josue Alejandro CentenoAún no hay calificaciones
- Termosoldador S7-GRAPHDocumento22 páginasTermosoldador S7-GRAPHEmanuel Josue Alejandro CentenoAún no hay calificaciones
- Lab 3 - PresionDocumento27 páginasLab 3 - PresionEmanuel Josue Alejandro CentenoAún no hay calificaciones
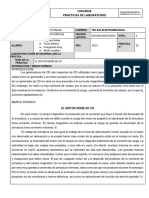
- Marco TeóricoDocumento2 páginasMarco TeóricoEmanuel Josue Alejandro CentenoAún no hay calificaciones
- L15 Y L16 Cortadora de TubosDocumento19 páginasL15 Y L16 Cortadora de TubosEmanuel Josue Alejandro CentenoAún no hay calificaciones
- Examen Matemáticas Aplicadas Electrónica Scilab Programación Señales Circuitos RLC FourierDocumento4 páginasExamen Matemáticas Aplicadas Electrónica Scilab Programación Señales Circuitos RLC FourierEmanuel Josue Alejandro CentenoAún no hay calificaciones
- Segmentación de mercados de Aspur y Playa SalinasDocumento5 páginasSegmentación de mercados de Aspur y Playa SalinasEmanuel Josue Alejandro CentenoAún no hay calificaciones
- Carga eléctrica: características y tiposDocumento1 páginaCarga eléctrica: características y tiposJuan Ruiz lopezAún no hay calificaciones
- Algoritmo Del UnifacDocumento9 páginasAlgoritmo Del UnifacRoberto VeluetaAún no hay calificaciones
- Metodo PH Diferencial para Determinar AntocianinasDocumento2 páginasMetodo PH Diferencial para Determinar AntocianinasShonnyBFFAún no hay calificaciones
- 02 Memoria de Calculo - EstructurasDocumento13 páginas02 Memoria de Calculo - EstructurasAmy GCAún no hay calificaciones
- Problemario 1Documento4 páginasProblemario 1Diaz OrlaAún no hay calificaciones
- Ley de Boyle-MariotteDocumento3 páginasLey de Boyle-MariotteJeffgamingAún no hay calificaciones
- Diagrama de Equilibrio T - X.Y 1Documento4 páginasDiagrama de Equilibrio T - X.Y 1Luiggina Ugarte TassaraAún no hay calificaciones
- SHL 04 Accidents Explosió 2014Documento10 páginasSHL 04 Accidents Explosió 2014Juan PerezAún no hay calificaciones
- Propiedades físico-químicas, mecánicas y tecnológicas de los materialesDocumento26 páginasPropiedades físico-químicas, mecánicas y tecnológicas de los materialesJhunior ReáteguiAún no hay calificaciones
- RespuestasDocumento14 páginasRespuestasMavante Vante20% (5)
- Fresadora FTX 125 FuDocumento52 páginasFresadora FTX 125 FuDiego RamirezAún no hay calificaciones
- La corrosión: clasificación, causas e implicacionesDocumento1 páginaLa corrosión: clasificación, causas e implicacionesNat0% (1)
- Hidrodinamica de Una Columna Empacada InformeDocumento8 páginasHidrodinamica de Una Columna Empacada InformegiomorajuarezAún no hay calificaciones
- PRÁCTICA 4 - Determinacion de Relaciones Gravimetricas y VolumetricasDocumento20 páginasPRÁCTICA 4 - Determinacion de Relaciones Gravimetricas y VolumetricasAlvaro Hernandez CaballeroAún no hay calificaciones
- Perfil Potencial Espontaneo ListodocxDocumento4 páginasPerfil Potencial Espontaneo ListodocxMatiasAún no hay calificaciones
- Potenciometría y conductometría: determinación de potencialesDocumento18 páginasPotenciometría y conductometría: determinación de potencialesAntonio Rivero100% (1)
- O.-3.4 Analisis Sismico Lateral Del Espigon Enron en CorintoDocumento21 páginasO.-3.4 Analisis Sismico Lateral Del Espigon Enron en CorintoYaoskaAún no hay calificaciones
- Taller de Crecimiento General Teórico Mecánica de FluidosDocumento10 páginasTaller de Crecimiento General Teórico Mecánica de FluidosJoseph Silva OrdonezAún no hay calificaciones
- Ev. Diagnóstica Ciencias Naturales 8° Básico Marzo 2021Documento3 páginasEv. Diagnóstica Ciencias Naturales 8° Básico Marzo 2021barbaraAún no hay calificaciones
- Diseño de miembros de acero laminado en caliente AISC 360-16Documento2 páginasDiseño de miembros de acero laminado en caliente AISC 360-16Fredd FerdyAún no hay calificaciones
- Tratamiento de DatosDocumento10 páginasTratamiento de DatosDanitzaAún no hay calificaciones
- Mecanismos Del SecadoDocumento6 páginasMecanismos Del Secadojosue_145Aún no hay calificaciones
- Proyecto FisicaaDocumento9 páginasProyecto FisicaaMelvin QPAún no hay calificaciones
- TransformadoresDocumento18 páginasTransformadoresOscar DGAún no hay calificaciones
- Medición flujo presión laboratorio potencia fluidaDocumento6 páginasMedición flujo presión laboratorio potencia fluidaCati McLovinAún no hay calificaciones
- Fouad2017 en EsDocumento5 páginasFouad2017 en EsSebastián MoraAún no hay calificaciones
- Practica 2Documento11 páginasPractica 2logisticAún no hay calificaciones
- Balance de Energia y MateriDocumento6 páginasBalance de Energia y Materidaka1991Aún no hay calificaciones
- 2.desarrollo de Los Procesos de Moldeo Por Inyección y Extrusión de Polvos para La Obtención de Piezas de Aceros Inoxidables Dúplex y FerríticosDocumento235 páginas2.desarrollo de Los Procesos de Moldeo Por Inyección y Extrusión de Polvos para La Obtención de Piezas de Aceros Inoxidables Dúplex y FerríticosMatias FigueroaAún no hay calificaciones
- 5 - Mov. Rect. Unif. Variado (Reparado)Documento5 páginas5 - Mov. Rect. Unif. Variado (Reparado)Hiena VagabondAún no hay calificaciones
- La revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaDe EverandLa revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaCalificación: 5 de 5 estrellas5/5 (200)
- Batidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoDe EverandBatidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoCalificación: 5 de 5 estrellas5/5 (2)
- Interpretación del ECG: Una Guía Práctica e Intuitiva para Aprender a Leer el ECG y Diagnosticar y Tratar ArritmiasDe EverandInterpretación del ECG: Una Guía Práctica e Intuitiva para Aprender a Leer el ECG y Diagnosticar y Tratar ArritmiasAún no hay calificaciones
- Disciplina Mental: Técnicas infalibles para lograr todo lo que te propones y eliminar la pereza y la procrastinación de tu vida para siempreDe EverandDisciplina Mental: Técnicas infalibles para lograr todo lo que te propones y eliminar la pereza y la procrastinación de tu vida para siempreCalificación: 5 de 5 estrellas5/5 (3)
- Zensorialmente : Dejá que tu cuerpo sea tu cerebroDe EverandZensorialmente : Dejá que tu cuerpo sea tu cerebroAún no hay calificaciones
- Prescripción de ejercico físico para la saludDe EverandPrescripción de ejercico físico para la saludCalificación: 5 de 5 estrellas5/5 (1)
- Reconstrucción de dientes endodonciados: Pautas de actuación clínicaDe EverandReconstrucción de dientes endodonciados: Pautas de actuación clínicaCalificación: 5 de 5 estrellas5/5 (4)
- Anatomía & 100 estiramientos Esenciales (Color): Técnicas, beneficios, precauciones, consejos, tablas de series, dolenciasDe EverandAnatomía & 100 estiramientos Esenciales (Color): Técnicas, beneficios, precauciones, consejos, tablas de series, dolenciasCalificación: 4.5 de 5 estrellas4.5/5 (21)
- La metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceDe EverandLa metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceCalificación: 5 de 5 estrellas5/5 (8)
- Fisiopatología de las enfermedades cardiovascularesDe EverandFisiopatología de las enfermedades cardiovascularesCalificación: 5 de 5 estrellas5/5 (1)
- El péndulo de sanación: Péndulo hebreo. Investigación y sistematización de la técnicaDe EverandEl péndulo de sanación: Péndulo hebreo. Investigación y sistematización de la técnicaCalificación: 4.5 de 5 estrellas4.5/5 (27)
- Desastres y emergencias. Prevención, mitigación y preparaciónDe EverandDesastres y emergencias. Prevención, mitigación y preparaciónCalificación: 4 de 5 estrellas4/5 (5)
- Teoría de juegos: Una introducción matemática a la toma de decisionesDe EverandTeoría de juegos: Una introducción matemática a la toma de decisionesCalificación: 4 de 5 estrellas4/5 (1)
- La vibración de las ondas cerebrales: Recuperar el ritmo de una vida saludable y felizDe EverandLa vibración de las ondas cerebrales: Recuperar el ritmo de una vida saludable y felizCalificación: 5 de 5 estrellas5/5 (7)
- Neurociencia para vencer la depresión: La esprial ascendenteDe EverandNeurociencia para vencer la depresión: La esprial ascendenteCalificación: 4.5 de 5 estrellas4.5/5 (10)
- El libro conciso de la punción seca: Manual del terapeuta para las aplicaciones en los puntos gatillo miofasciales (Color)De EverandEl libro conciso de la punción seca: Manual del terapeuta para las aplicaciones en los puntos gatillo miofasciales (Color)Calificación: 3 de 5 estrellas3/5 (2)
- Neuroanatomía: Fundamentos de neuroanatomía estructural, funcional y clínicaDe EverandNeuroanatomía: Fundamentos de neuroanatomía estructural, funcional y clínicaCalificación: 4 de 5 estrellas4/5 (16)
- Dieta Para El Reflujo Biliar y Gastritis Alcalina - Incluye 20 Deliciosas Recetas Libres de Gluten y de Lácteos Para Tratar y Aliviar el Reflujo Biliar y Sus Molestos SíntomasDe EverandDieta Para El Reflujo Biliar y Gastritis Alcalina - Incluye 20 Deliciosas Recetas Libres de Gluten y de Lácteos Para Tratar y Aliviar el Reflujo Biliar y Sus Molestos SíntomasCalificación: 4 de 5 estrellas4/5 (9)
- Trucos para Leer la Mente de los Demás: Cómo Adivinar el Pensamiento de los Demás con Poco Esfuerzo. 2 Libros en 1 - Secretos de la Psicología Oscura, Cómo ser un Detector de MentirasDe EverandTrucos para Leer la Mente de los Demás: Cómo Adivinar el Pensamiento de los Demás con Poco Esfuerzo. 2 Libros en 1 - Secretos de la Psicología Oscura, Cómo ser un Detector de MentirasCalificación: 4.5 de 5 estrellas4.5/5 (3)