También podría gustarte
- Metodología de proyecto sismorresistente de edificiosDe EverandMetodología de proyecto sismorresistente de edificiosCalificación: 5 de 5 estrellas5/5 (1)
- P-7 Analisis DinamicoDocumento85 páginasP-7 Analisis DinamicoBrianda DiazAún no hay calificaciones
- Clase 1Documento59 páginasClase 1Jessica HodgesAún no hay calificaciones
- Clase 1Documento50 páginasClase 1jorgeballabenAún no hay calificaciones
- Consideraciones Analisis SismicoDocumento63 páginasConsideraciones Analisis Sismicodaniel BARZOLAAún no hay calificaciones
- Elasticidad y Resistencia de Materiales: Conceptos y Principios BásicosDocumento68 páginasElasticidad y Resistencia de Materiales: Conceptos y Principios BásicosJose Mauricio MontialAún no hay calificaciones
- Silabo de Dinámica y VibracionesDocumento8 páginasSilabo de Dinámica y VibracionesAlberto Aliaga AyrureAún no hay calificaciones
- Análisis EstructuralDocumento28 páginasAnálisis EstructuralAbrahanAún no hay calificaciones
- E4-Análisis Dinámico de EstructurasDocumento41 páginasE4-Análisis Dinámico de EstructurasFran MuñozAún no hay calificaciones
- TensionDocumento33 páginasTensionjorge mario mejia rosalesAún no hay calificaciones
- Capitulo 1 PDFDocumento10 páginasCapitulo 1 PDFChalco JotazheAún no hay calificaciones
- 1501 Sesión 4 FIC Teorema de Flexión Simple Jorccosupa 2014Documento18 páginas1501 Sesión 4 FIC Teorema de Flexión Simple Jorccosupa 2014Anonymous CoidT1yAún no hay calificaciones
- Copia de ANÁLISIS ESTRUCTURAL PDFDocumento14 páginasCopia de ANÁLISIS ESTRUCTURAL PDFHaydé Miranda MantillaAún no hay calificaciones
- Silabo Analisis EstructuraI II Civil 2018-IDocumento10 páginasSilabo Analisis EstructuraI II Civil 2018-IDiego Yapapasca PAún no hay calificaciones
- EBOOK - Manual Inventor Nastran 2020 PDFDocumento84 páginasEBOOK - Manual Inventor Nastran 2020 PDFJesus Ruiz CastilloAún no hay calificaciones
- UntitledDocumento15 páginasUntitledHector Agustin Hinojosa AlvaradoAún no hay calificaciones
- CLASE 10 Analisis Matrcial de EstructurasDocumento39 páginasCLASE 10 Analisis Matrcial de EstructurasFranklin QCcAún no hay calificaciones
- Clase 2 - Equilibrio Dinámico de Sistemas 1DOF PDFDocumento8 páginasClase 2 - Equilibrio Dinámico de Sistemas 1DOF PDFNicole Gonzalez MuñozAún no hay calificaciones
- 1° Anle Desempeño Sísmico-HhcDocumento40 páginas1° Anle Desempeño Sísmico-HhcSiler Yhelsin Carrasco AltamiranoAún no hay calificaciones
- Programacion de Aula Mecanica BACHILLERATO EVERESTDocumento11 páginasProgramacion de Aula Mecanica BACHILLERATO EVERESTmarcosllmAún no hay calificaciones
- Programa RM - I - 2022 - Grupo3Documento5 páginasPrograma RM - I - 2022 - Grupo3Juan LópezAún no hay calificaciones
- Sesion 25-26 - Metodo MatricialDocumento119 páginasSesion 25-26 - Metodo MatricialMartin VasquezAún no hay calificaciones
- Análisis de Las Estructuras (Método de La Rigidez) - INFAMY Uwu PDFDocumento201 páginasAnálisis de Las Estructuras (Método de La Rigidez) - INFAMY Uwu PDFJean Harder Heredia TorresAún no hay calificaciones
- Ingenieria AntisismicaDocumento25 páginasIngenieria AntisismicaLuisinho HerreraAún no hay calificaciones
- Libro Analisis Matricial PDFDocumento201 páginasLibro Analisis Matricial PDFJuver Olmos HuallpaAún no hay calificaciones
- Trabajo Parte 5Documento3 páginasTrabajo Parte 5Marcial Fonseca RojasAún no hay calificaciones
- Consulta 1Documento5 páginasConsulta 1Ivan Dario Moran ReinaAún no hay calificaciones
- Análisis de Estructuras: Departamento de Ingeniería Civil Y Ambiental 2017 Msc. Daniela Sepúlveda ContrerasDocumento35 páginasAnálisis de Estructuras: Departamento de Ingeniería Civil Y Ambiental 2017 Msc. Daniela Sepúlveda Contrerasfernanda pardonAún no hay calificaciones
- FISICADocumento4 páginasFISICARicardo GomezAún no hay calificaciones
- Sílabo Ing SismoresistDocumento3 páginasSílabo Ing SismoresistzumiAún no hay calificaciones
- S05.s2-Material de La ClaseDocumento55 páginasS05.s2-Material de La ClaseJ VeraAún no hay calificaciones
- Introduccion Al Analisis EstructuralDocumento24 páginasIntroduccion Al Analisis EstructuralJunior Jimenee'zAún no hay calificaciones
- 2 U2 - S5 - GT - Introducción Al Análisis EstructuralDocumento42 páginas2 U2 - S5 - GT - Introducción Al Análisis EstructuralJefferson Canaza SalcedoAún no hay calificaciones
- Unidad 1 Mecanica de MaterialesDocumento25 páginasUnidad 1 Mecanica de MaterialesGeovany AguilarAún no hay calificaciones
- Clase 1.métodos de AnálisisDocumento13 páginasClase 1.métodos de AnálisisAllisson Guanoluisa samaniegoAún no hay calificaciones
- Analisis Matricial de Estructuras-2019-1Documento3 páginasAnalisis Matricial de Estructuras-2019-1Juan Américo López PizarroAún no hay calificaciones
- INC 1013 FisicaDocumento2 páginasINC 1013 FisicaEmmanuel FigueroaAún no hay calificaciones
- Do Fin 105 Si Asuc00468 2020Documento6 páginasDo Fin 105 Si Asuc00468 2020Jose KionAún no hay calificaciones
- 20192-09 A Analisis Estructural PDFDocumento34 páginas20192-09 A Analisis Estructural PDFDiego Fernando Paredes SaldañaAún no hay calificaciones
- Ae1 TP0 TeoríaDocumento4 páginasAe1 TP0 TeoríaMirakuru SoldierAún no hay calificaciones
- EstructurasDocumento26 páginasEstructurasKarito DuronAún no hay calificaciones
- Programa DinámicaDocumento3 páginasPrograma DinámicaAndres Yesid Romero DuarteAún no hay calificaciones
- Análisis Sísmico (Generalidades)Documento65 páginasAnálisis Sísmico (Generalidades)JOSE ANDRES FERNANDEZ O.Aún no hay calificaciones
- Clase 12Documento18 páginasClase 12Rolando Diego Rojas IngaAún no hay calificaciones
- Presentación de La Asignatura Resistencia de Materiales UAC 2021Documento20 páginasPresentación de La Asignatura Resistencia de Materiales UAC 2021Marco cortes zepedaAún no hay calificaciones
- 1CIV25-2020-1 SilabusDocumento4 páginas1CIV25-2020-1 SilabusJavier Moreno RamirezAún no hay calificaciones
- Mecánica de Materiales LINEAMIENTOS Ene Jun 23Documento13 páginasMecánica de Materiales LINEAMIENTOS Ene Jun 23Héctor RangelAún no hay calificaciones
- Sílabo de Resistencia de MaterialesDocumento4 páginasSílabo de Resistencia de MaterialesGrover MantariAún no hay calificaciones
- CLASE 1 - BDocumento20 páginasCLASE 1 - BJosep Anderson Fernandez RiveraAún no hay calificaciones
- No LinealidadDocumento38 páginasNo LinealidadDELTA598Aún no hay calificaciones
- Present Re Silien CIA 3Documento49 páginasPresent Re Silien CIA 3CESAR ULISES LOPEZ TORRESAún no hay calificaciones
- Tema IntroductorioDocumento31 páginasTema IntroductorioCésar Mendoza ParedesAún no hay calificaciones
- Resistencia de materiales: algunos temas especiales (Segunda edición)De EverandResistencia de materiales: algunos temas especiales (Segunda edición)Calificación: 3 de 5 estrellas3/5 (4)
- Análisis estático y dinámico de estructurasDe EverandAnálisis estático y dinámico de estructurasCalificación: 4 de 5 estrellas4/5 (5)
- Conceptos avanzados del diseño estructural con madera: Parte II: CLT, modelación numérica, diseño anti-incendios y ayudas al cálculoDe EverandConceptos avanzados del diseño estructural con madera: Parte II: CLT, modelación numérica, diseño anti-incendios y ayudas al cálculoCalificación: 5 de 5 estrellas5/5 (1)
- Análisis estructural básico: Apuntes de claseDe EverandAnálisis estructural básico: Apuntes de claseCalificación: 5 de 5 estrellas5/5 (6)
- Avances de La Ingeniería en La Adecuación Sísmica de Las Construcciones de Tierra e HistóricasDocumento70 páginasAvances de La Ingeniería en La Adecuación Sísmica de Las Construcciones de Tierra e HistóricasHiden Jaime Machaca HuancolloAún no hay calificaciones
- SIISyG2017 CC 03 FK ActivoDocumento53 páginasSIISyG2017 CC 03 FK ActivoHiden Jaime Machaca HuancolloAún no hay calificaciones
- SIISyG2017 CC 02 NakamuraDocumento55 páginasSIISyG2017 CC 02 NakamuraHiden Jaime Machaca HuancolloAún no hay calificaciones
- SIISyG2017 CC 04 InversionDocumento19 páginasSIISyG2017 CC 04 InversionHiden Jaime Machaca HuancolloAún no hay calificaciones
- SIISyG2017 CC 01 MicrovibracionesDocumento28 páginasSIISyG2017 CC 01 MicrovibracionesHiden Jaime Machaca HuancolloAún no hay calificaciones
- SIISyG2017 - Dr. Rafael Aguilar - Aplicaciones de Tecnologias Modernas para La Conservacion Del Patrimonio en El PeruDocumento80 páginasSIISyG2017 - Dr. Rafael Aguilar - Aplicaciones de Tecnologias Modernas para La Conservacion Del Patrimonio en El PeruHiden Jaime Machaca HuancolloAún no hay calificaciones
- SIISyG2017 - Dr. Zenon J. Guzman - Comportamiento Dinámico No Lineal y Control de Vibración en Estructuras - Parte 2Documento56 páginasSIISyG2017 - Dr. Zenon J. Guzman - Comportamiento Dinámico No Lineal y Control de Vibración en Estructuras - Parte 2Hiden Jaime Machaca HuancolloAún no hay calificaciones
- SIISyG2017 - Dr. Nestor Tupa Fernandez - Filtracion y Drenaje de GeotextilesDocumento25 páginasSIISyG2017 - Dr. Nestor Tupa Fernandez - Filtracion y Drenaje de GeotextilesHiden Jaime Machaca HuancolloAún no hay calificaciones
- SIISyG2017 - Dr. Miguel A. Torres Matos - Estructuras Prefabricadas Resistentes A Sismos para La ReconstruccionDocumento92 páginasSIISyG2017 - Dr. Miguel A. Torres Matos - Estructuras Prefabricadas Resistentes A Sismos para La ReconstruccionHiden Jaime Machaca HuancolloAún no hay calificaciones
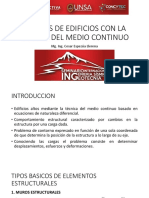
- SIISyG2017 - Mg. César Espezua Llerena - Analisis de Edificios Con La Tecnica Del Medio ContinuoDocumento32 páginasSIISyG2017 - Mg. César Espezua Llerena - Analisis de Edificios Con La Tecnica Del Medio ContinuoHiden Jaime Machaca HuancolloAún no hay calificaciones
- Administracion Educativa ClasesDocumento22 páginasAdministracion Educativa ClasesOrquídea LeonardoAún no hay calificaciones
- Aplicación de La Teoría de Las Titularidades de Los Alimentos Al Municipio de Las VueltasDocumento1 páginaAplicación de La Teoría de Las Titularidades de Los Alimentos Al Municipio de Las VueltasCharles Maurice ParraAún no hay calificaciones
- Estructuras Resonantes - Ejercicios ResueltosDocumento13 páginasEstructuras Resonantes - Ejercicios ResueltosAlejandro Briceño91% (32)
- Tecnicas de LocalizaciónDocumento12 páginasTecnicas de LocalizaciónAdmin TesterAún no hay calificaciones
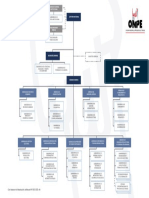
- Organigrama ONPEDocumento1 páginaOrganigrama ONPEYakeline vilchez cruzadoAún no hay calificaciones
- Bases RT 2023Documento39 páginasBases RT 2023Andréz GutiérrezAún no hay calificaciones
- Matriz de Impactos AmbientalesDocumento11 páginasMatriz de Impactos AmbientalesDavid Romero FerreiraAún no hay calificaciones
- Derecho RegistralDocumento136 páginasDerecho RegistralMariangel Orozco100% (1)
- Analisis MultivariadoDocumento4 páginasAnalisis MultivariadoJeysnen contreras pradoAún no hay calificaciones
- ASTM-C1064 Temperatura - En.españolDocumento3 páginasASTM-C1064 Temperatura - En.españolEdgar Fabian Castro Norato100% (2)
- Plan de Desarrollo Departamental Del Choco 20202023 Version FinalDocumento513 páginasPlan de Desarrollo Departamental Del Choco 20202023 Version FinalDeimer Stiwar Mena MurilloAún no hay calificaciones
- Qué Son Hoy Las Humanidades y Cuál Ha Sido Su Valor en La Universidad?Documento29 páginasQué Son Hoy Las Humanidades y Cuál Ha Sido Su Valor en La Universidad?carlos alberto britto casasAún no hay calificaciones
- Tsha U2 A2 FJVPDocumento6 páginasTsha U2 A2 FJVPJavier VacaAún no hay calificaciones
- FORGBU 001 Fraccionamiento MatriculaDocumento2 páginasFORGBU 001 Fraccionamiento MatriculaDaniela Valentina Ramírez AlvaradoAún no hay calificaciones
- Video 3 Errores o Distorsiones Cognitivas en La DepresionDocumento2 páginasVideo 3 Errores o Distorsiones Cognitivas en La DepresionkatherineAún no hay calificaciones
- Dimensiones de Estrés Laboral Relaciones ConDocumento6 páginasDimensiones de Estrés Laboral Relaciones ConAndrés Terrones CotrinaAún no hay calificaciones
- DocumentDocumento23 páginasDocumentZully CabreraAún no hay calificaciones
- Analisis de 10 Articulos CientificosDocumento6 páginasAnalisis de 10 Articulos CientificosBrandon Parra FuentesAún no hay calificaciones
- Revolucion IndustrialDocumento45 páginasRevolucion IndustrialAlessandroAún no hay calificaciones
- Primer Taller de Algebra LinealDocumento16 páginasPrimer Taller de Algebra LinealAngie Yeraldin Santafe BenitezAún no hay calificaciones
- Diagnostico TerceroDocumento16 páginasDiagnostico TerceroYm SandovalAún no hay calificaciones
- Rueda de La Vida y Trabajo en EquipoDocumento4 páginasRueda de La Vida y Trabajo en EquipoLázaro DeningAún no hay calificaciones
- Jurados Mayo 2022Documento12 páginasJurados Mayo 2022DelsyAún no hay calificaciones
- Tarea FaniaDocumento11 páginasTarea FaniameloAún no hay calificaciones
- Leyes de GravimetriaDocumento13 páginasLeyes de GravimetriaLesly ArmendarizAún no hay calificaciones
- IE II-EJE 1 Temas 1 y 2Documento9 páginasIE II-EJE 1 Temas 1 y 2Danisa MaldonadoAún no hay calificaciones
- Método Dystra-Parson-Prediccion Auca Sur PDFDocumento36 páginasMétodo Dystra-Parson-Prediccion Auca Sur PDFfredi campuesAún no hay calificaciones
- Sesion Ingles Alrededor Del MundoDocumento2 páginasSesion Ingles Alrededor Del MundoSaul MalkiAún no hay calificaciones
- AnalisisEquilibriotermodinamico.. PDFDocumento13 páginasAnalisisEquilibriotermodinamico.. PDFNelly Quintana ZapataAún no hay calificaciones
- Mieloma-Multiple CorregidoDocumento84 páginasMieloma-Multiple CorregidoMarcelaAún no hay calificaciones