También podría gustarte
- Introducción Control RobustoDocumento32 páginasIntroducción Control RobustoMiguel AngelAún no hay calificaciones
- Formacion Especifica Tarea ISE8 2 1Documento35 páginasFormacion Especifica Tarea ISE8 2 1Lau BenalcazarAún no hay calificaciones
- Métodos de Sintonización en Un Lazo de ControlDocumento13 páginasMétodos de Sintonización en Un Lazo de ControlayskelAún no hay calificaciones
- Error en Estado EstableDocumento16 páginasError en Estado EstableIrvin Best RapperAún no hay calificaciones
- Pid 1Documento12 páginasPid 1miguelmt3012Aún no hay calificaciones
- Controladores DiscretosDocumento12 páginasControladores DiscretosEdmundo R. NeriaAún no hay calificaciones
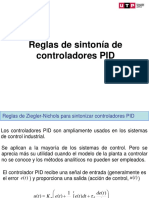
- Reglas de Sintonía de Controladores PIDDocumento8 páginasReglas de Sintonía de Controladores PIDErlanDuarteAún no hay calificaciones
- Reglas Ziegler NicholsDocumento11 páginasReglas Ziegler NicholsMeny Ny100% (2)
- Sintonía de PID Por Ziegler-NicholsDocumento10 páginasSintonía de PID Por Ziegler-NicholsLuis GaliciaAún no hay calificaciones
- Sintonizacion de Contr PidDocumento46 páginasSintonizacion de Contr PidAntonio Jesus LeonAún no hay calificaciones
- Práctica de Sintonía de Lazos de ControlDocumento14 páginasPráctica de Sintonía de Lazos de ControlHansel Castilla CaballeroAún no hay calificaciones
- Unidad Vi Criterio de Ziegler y NicholsDocumento11 páginasUnidad Vi Criterio de Ziegler y NicholsXavierTorresAún no hay calificaciones
- F.C G.08 P.3 B.4Documento12 páginasF.C G.08 P.3 B.4HernanGascaEstradaAún no hay calificaciones
- Método de Ziegler y NicholsDocumento11 páginasMétodo de Ziegler y Nicholserick190796Aún no hay calificaciones
- LabControl P07 Sintonía 2 S20232Documento5 páginasLabControl P07 Sintonía 2 S20232Leidy Tatiana Quiroga AlzateAún no hay calificaciones
- Informe Final 3Documento9 páginasInforme Final 3Henry Andre Miranda SalazarAún no hay calificaciones
- Sintonizacion Coregido 1Documento38 páginasSintonizacion Coregido 1joana ordoñez caballeroAún no hay calificaciones
- Proyecto de Controladores en El Dominio Del TiempoDocumento25 páginasProyecto de Controladores en El Dominio Del TiemponelsonAún no hay calificaciones
- Pid Z-NDocumento12 páginasPid Z-NEugenio Hermosilla CorderoAún no hay calificaciones
- EL218 Unidad 4b Sintonía de Controladores PID 2023-2Documento55 páginasEL218 Unidad 4b Sintonía de Controladores PID 2023-2Susan Nicold TapiaAún no hay calificaciones
- Practica Ziegler NicholsDocumento8 páginasPractica Ziegler NicholsjorgeAún no hay calificaciones
- PID Sintonizacià NDocumento4 páginasPID Sintonizacià NFABIAN ABDIAS ESPINOZA HABIASAún no hay calificaciones
- Reglas de Sintonia PID - Control de Procesos.Documento11 páginasReglas de Sintonia PID - Control de Procesos.AdrianRmzAún no hay calificaciones
- Diseño de Controlador y Sintonización EmpíricaDocumento15 páginasDiseño de Controlador y Sintonización EmpíricaJulio Chuva Jr.Aún no hay calificaciones
- Sintonizacion Ziegler NicholsDocumento21 páginasSintonizacion Ziegler NicholsMichael Esteban Boggiano Castillo100% (1)
- Ziegler Nichols MatlabDocumento5 páginasZiegler Nichols MatlabFrank DazaAún no hay calificaciones
- 2 Reglas de Sintonía de Controladores PID (Reparado)Documento10 páginas2 Reglas de Sintonía de Controladores PID (Reparado)omarAún no hay calificaciones
- Metodo de Sintonizacion Ziegler and Nichols Curva de ReaccionDocumento17 páginasMetodo de Sintonizacion Ziegler and Nichols Curva de ReaccionDamianEduardoAún no hay calificaciones
- Control PID de Temperatura Con PIC18F4455Documento11 páginasControl PID de Temperatura Con PIC18F4455Oscar Concha RdzAún no hay calificaciones
- Controladores TradicionalesDocumento23 páginasControladores Tradicionalesluxini36Aún no hay calificaciones
- MT221 Unidad 4 Sintonía de Controladores PID 2015-3 PDFDocumento53 páginasMT221 Unidad 4 Sintonía de Controladores PID 2015-3 PDFJose CuencaAún no hay calificaciones
- Semana 11Documento56 páginasSemana 11Katherine Gabriella Hernandez GomezAún no hay calificaciones
- Ziegler and NicholsDocumento11 páginasZiegler and NicholsJimmy Minaya BenavidesAún no hay calificaciones
- Metodos de SintoniaDocumento4 páginasMetodos de SintoniaJenry UniversitarioAún no hay calificaciones
- Clase14 Reglas de Sintonía de Controladores PIDDocumento11 páginasClase14 Reglas de Sintonía de Controladores PIDGiancarlos DámazoAún no hay calificaciones
- Sintonización de Controladores PIDDocumento14 páginasSintonización de Controladores PIDCésar Augusto González García100% (1)
- Análisis y Diseño de Controladores PID PDFDocumento3 páginasAnálisis y Diseño de Controladores PID PDFAldemir VargasAún no hay calificaciones
- PID S Ziegler-NicholsDocumento4 páginasPID S Ziegler-Nicholsluiald6906Aún no hay calificaciones
- Paper Proy ControlDocumento6 páginasPaper Proy ControlStefanyAún no hay calificaciones
- Control PidDocumento6 páginasControl PidR Rdez DaveAún no hay calificaciones
- CpidDocumento12 páginasCpidjan gutiAún no hay calificaciones
- S10 El Controlador PIDDocumento17 páginasS10 El Controlador PIDSANTIAGO NAJARRO EDINSON HERNANAún no hay calificaciones
- Metodo ZieglerDocumento13 páginasMetodo ZieglerGustavo HerreraAún no hay calificaciones
- FINAL 2 Sitema de Control 2 2.2Documento19 páginasFINAL 2 Sitema de Control 2 2.2David LiviasAún no hay calificaciones
- Unid4 Sem13Documento40 páginasUnid4 Sem13Diego OmarAún no hay calificaciones
- El Controlador Pid BásicoDocumento12 páginasEl Controlador Pid Básicocesaryfaby22Aún no hay calificaciones
- 3.7 Sintonizacion de ControladoresDocumento8 páginas3.7 Sintonizacion de Controladoreskarla0% (1)
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108De EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Calificación: 4.5 de 5 estrellas4.5/5 (8)
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDe EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaAún no hay calificaciones
- UF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasDe EverandUF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasCalificación: 5 de 5 estrellas5/5 (1)
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208De EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Aún no hay calificaciones
- Introducción a la dinámica computacional de fluidos (CFD) en Ingeniería Química.De EverandIntroducción a la dinámica computacional de fluidos (CFD) en Ingeniería Química.Aún no hay calificaciones
- Control y verificación de productos fabricados. FMEE0108De EverandControl y verificación de productos fabricados. FMEE0108Aún no hay calificaciones
- Eficiencia energética en las instalaciones de calefacción y acs en los edificios. ENAC0108De EverandEficiencia energética en las instalaciones de calefacción y acs en los edificios. ENAC0108Aún no hay calificaciones
- Manual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)De EverandManual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Calificación: 2 de 5 estrellas2/5 (1)
- Sistema de información para la operación remota de plantas de generación de energía hidroeléctricaDe EverandSistema de información para la operación remota de plantas de generación de energía hidroeléctricaAún no hay calificaciones
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311De EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Calificación: 4.5 de 5 estrellas4.5/5 (2)
- Filtro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoDe EverandFiltro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoAún no hay calificaciones
- Control neuronal y difuso para sistemas fotovoltaicosDe EverandControl neuronal y difuso para sistemas fotovoltaicosAún no hay calificaciones
- Ventilacion Mecanica - IntroduccionDocumento31 páginasVentilacion Mecanica - IntroduccionDolly GarceteAún no hay calificaciones
- Electromedicina Prepara EvolucionDocumento6 páginasElectromedicina Prepara EvolucionDolly GarceteAún no hay calificaciones
- UNIDAD I CONCEPTOS GENERALES. Conceptos Generales MicroprocesadoresDocumento16 páginasUNIDAD I CONCEPTOS GENERALES. Conceptos Generales MicroprocesadoresDolly GarceteAún no hay calificaciones
- UNIDAD 3 ARQUITECTURA DEL Z80. Microprocesadores Otoño 2011Documento47 páginasUNIDAD 3 ARQUITECTURA DEL Z80. Microprocesadores Otoño 2011Dolly GarceteAún no hay calificaciones
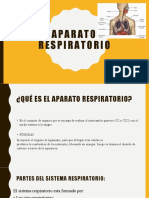
- Aparato Respiratorio CompletoDocumento15 páginasAparato Respiratorio CompletoDolly GarceteAún no hay calificaciones
- Topología de RedesDocumento69 páginasTopología de RedesDolly GarceteAún no hay calificaciones
- Sistemas ExpertosDocumento14 páginasSistemas ExpertosDolly GarceteAún no hay calificaciones
- Ecuaciones de Ondas ElectromagneticasDocumento12 páginasEcuaciones de Ondas ElectromagneticasDolly GarceteAún no hay calificaciones
- Libro Ogata-Capítulo 10-REGLAS DE SINTONIZACIÓN PARA CONTROLADORES PIDDocumento10 páginasLibro Ogata-Capítulo 10-REGLAS DE SINTONIZACIÓN PARA CONTROLADORES PIDDolly GarceteAún no hay calificaciones
- ENFERMERIADocumento1 páginaENFERMERIAFernandaAún no hay calificaciones
- Clase 6Documento11 páginasClase 6Nilsa lilian SanabriaAún no hay calificaciones
- Normas Y Manual de Bioseguridad en Laboratorio de Analisis Clinico IndiceDocumento60 páginasNormas Y Manual de Bioseguridad en Laboratorio de Analisis Clinico IndiceCamila Córdova LópezAún no hay calificaciones
- Preguntas 44Documento4 páginasPreguntas 44Jose Yantalema100% (1)
- Fuerza Eléctrica, Ley de Coulomb. EjerciciosDocumento12 páginasFuerza Eléctrica, Ley de Coulomb. EjerciciosMaría Sofía MartínezAún no hay calificaciones
- EspinacasDocumento6 páginasEspinacaselianAún no hay calificaciones
- Caso Clinico N 4 para Realizar 07.30amDocumento16 páginasCaso Clinico N 4 para Realizar 07.30amJUDITH MADELEINE ENCO PORTILLAAún no hay calificaciones
- Formato Planeacion Clases 2019 (Rumba)Documento1 páginaFormato Planeacion Clases 2019 (Rumba)garridojhon2Aún no hay calificaciones
- Frank y Lillian GilbrethDocumento3 páginasFrank y Lillian GilbrethSophia CorredorAún no hay calificaciones
- Diseño de Sesión de Aprendizaje SM - 1Documento1 páginaDiseño de Sesión de Aprendizaje SM - 1CESAR HUACHALLANQUIAún no hay calificaciones
- Planificacion RosarioDocumento2 páginasPlanificacion RosarioTere RodríguezAún no hay calificaciones
- ANALISISDocumento9 páginasANALISISJuan Miguel Lopez ParraAún no hay calificaciones
- Histologia de La Corteza Cerebral: Morfofisiologia I: Primera UnidadDocumento22 páginasHistologia de La Corteza Cerebral: Morfofisiologia I: Primera UnidadGloriaMarisolJaureguiMinchanAún no hay calificaciones
- Resumen La Ciencia Su Metodo y Su Filosofia - C. RochaDocumento5 páginasResumen La Ciencia Su Metodo y Su Filosofia - C. RochaNancy Aguilar Ruiz100% (1)
- Ficha de Registro Yoany, Heiler y WilborDocumento5 páginasFicha de Registro Yoany, Heiler y WilborJONATHAN PORRAS MUÑOZAún no hay calificaciones
- AsintotasDocumento7 páginasAsintotasJose L. Montenegro P.Aún no hay calificaciones
- ETNOGRAFIADocumento9 páginasETNOGRAFIALEYDI MARIANA D TAún no hay calificaciones
- .Analiza Situaciones Problemáticas en El Contexto Escolar Vinculadas Con La EvaluaciónDocumento4 páginas.Analiza Situaciones Problemáticas en El Contexto Escolar Vinculadas Con La Evaluaciónfrankely escolastico roblesAún no hay calificaciones
- Arquitectura Innovadora Siglo XIXDocumento29 páginasArquitectura Innovadora Siglo XIXEdgarCuestaAfsAún no hay calificaciones
- Plantilla Protocolo Colaborativo 3Documento11 páginasPlantilla Protocolo Colaborativo 36002120056 ROSA ISELLA GAVIRIA DIAZ ESTUDIANTE ACTIVOAún no hay calificaciones
- ETICA Y VALORES GUIA 2 (Las Emociones)Documento3 páginasETICA Y VALORES GUIA 2 (Las Emociones)ABEL AGUDELOAún no hay calificaciones
- Edison Valbuena Tarea 1Documento15 páginasEdison Valbuena Tarea 1LuisaManriqueAún no hay calificaciones
- Sesión 1 Imagen Profesional 3Documento29 páginasSesión 1 Imagen Profesional 3ArturoMiztliNavarroOlivares0% (1)
- 10mo - CCNN Planificación 9 Semanas 2023Documento29 páginas10mo - CCNN Planificación 9 Semanas 2023Claudia GomezAún no hay calificaciones
- Ética y Medio AmbienteDocumento7 páginasÉtica y Medio AmbienteEmilio DormondAún no hay calificaciones
- Diversidad y Desarrollo Miguel Lopez MeleroDocumento32 páginasDiversidad y Desarrollo Miguel Lopez MeleroAlmaNogueiraAún no hay calificaciones
- Arte Canario Pricipio Siglo XXDocumento242 páginasArte Canario Pricipio Siglo XXMusa DifusaAún no hay calificaciones
- Lechner, Norbert - Los Patios Interiores de La Democracia Subjetividad y PolíticaDocumento189 páginasLechner, Norbert - Los Patios Interiores de La Democracia Subjetividad y PolíticaNicolás Rojas100% (5)
- ACTIVIDAD 6 - Ecología Integral, Proyecto Del Curso Aprender Viviendo - YENI GARZONDocumento4 páginasACTIVIDAD 6 - Ecología Integral, Proyecto Del Curso Aprender Viviendo - YENI GARZONYeni GarzonAún no hay calificaciones
- Rubiorico Gloria M03S2Al4Documento3 páginasRubiorico Gloria M03S2Al4Gloria De VázquezAún no hay calificaciones