También podría gustarte
- Guia 1 Conceptualizacion Básica Sobre Economía y Política 10° Colcastro 2011Documento2 páginasGuia 1 Conceptualizacion Básica Sobre Economía y Política 10° Colcastro 2011Carlos Humberto Pedraza Blanco100% (4)
- Enfermer I ADocumento9 páginasEnfermer I ANancy RodriguezAún no hay calificaciones
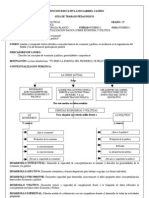
- Árbol de IdeasDocumento1 páginaÁrbol de IdeasEdwar Palacios Largacha100% (1)
- Sistemas de control digitalDocumento3 páginasSistemas de control digitalYosimar Enoki RojasAún no hay calificaciones
- Guia Palomita BlancaDocumento3 páginasGuia Palomita BlancaSämmh Ignacio Riveros ValdebenitoAún no hay calificaciones
- Planeador Informatica 2021Documento20 páginasPlaneador Informatica 2021CARLOS ANDRESAún no hay calificaciones
- Caso Práctico 2Documento4 páginasCaso Práctico 2Wendy González LunaAún no hay calificaciones
- Lita, La Niña Del Fin Del MundoDocumento42 páginasLita, La Niña Del Fin Del MundoCindy KatherineAún no hay calificaciones
- Tarea - 01 - State Space ModellingDocumento7 páginasTarea - 01 - State Space ModellingZen NerfeAún no hay calificaciones
- Maq2 Ejemplos 1Documento11 páginasMaq2 Ejemplos 1Mr. LycalopexAún no hay calificaciones
- Deber 1Documento4 páginasDeber 1Lüîîs PâçhëçôôAún no hay calificaciones
- Tema IV - Sistemas de Control I VDDocumento53 páginasTema IV - Sistemas de Control I VDCARMEN VICTORIA CORNEJO HUATUCOAún no hay calificaciones
- Exa Ing CTRLDocumento17 páginasExa Ing CTRLLuis Antonio Rosales TejadaAún no hay calificaciones
- Sesion02 4 - Series de Tiempo Estacionarias 2008Documento18 páginasSesion02 4 - Series de Tiempo Estacionarias 2008justinaAún no hay calificaciones
- Respuesta Transitoria 1-2021Documento27 páginasRespuesta Transitoria 1-2021Elkin Bedoya VásquezAún no hay calificaciones
- Taller 1. Ingenieria de ConfiabilidadDocumento4 páginasTaller 1. Ingenieria de ConfiabilidadERIKA JAZMIN SANTOS BUSTOSAún no hay calificaciones
- Procesamiento Digital de SeñalesDocumento6 páginasProcesamiento Digital de SeñalesSpark TronicsAún no hay calificaciones
- Señales y Sistemas de Tiempo ContinuoDocumento76 páginasSeñales y Sistemas de Tiempo ContinuoArmando CajahuaringaAún no hay calificaciones
- Tarea 2021 - 1Documento29 páginasTarea 2021 - 1JOSE ALBERTO QUINTANA SOLISAún no hay calificaciones
- TAREA 4 Cristian MelipichunDocumento20 páginasTAREA 4 Cristian MelipichunsnoopyzzzAún no hay calificaciones
- Lab 3Documento13 páginasLab 3LuisUsseglioAún no hay calificaciones
- Ejercicio-10 Literal BDocumento4 páginasEjercicio-10 Literal BCinthya NarvaezAún no hay calificaciones
- Conmutacion Tema2Documento77 páginasConmutacion Tema2Juan MartinezAún no hay calificaciones
- Examen Matemáticas II de Navarra (Extraordinaria de 2019) (WWW - Examenesdepau.com)Documento3 páginasExamen Matemáticas II de Navarra (Extraordinaria de 2019) (WWW - Examenesdepau.com)JonAún no hay calificaciones
- 2oexamen 2021 I 2CV10Documento2 páginas2oexamen 2021 I 2CV10Diego NájeraAún no hay calificaciones
- Clase 20 Programación FeedbackDocumento4 páginasClase 20 Programación FeedbackJOEL MARCELO SOLIZ CAGUAYAAún no hay calificaciones
- Semana 13Documento4 páginasSemana 13Veronica CadenillasAún no hay calificaciones
- Ejercicios circuitos eléctricos mallas IPNDocumento26 páginasEjercicios circuitos eléctricos mallas IPNAxelAún no hay calificaciones
- Cur Lineales 2Documento18 páginasCur Lineales 2Victor Manuel Avendaño PezoAún no hay calificaciones
- Simulación Cubli 20-sim MatlabDocumento16 páginasSimulación Cubli 20-sim MatlabEden Paz TadeoAún no hay calificaciones
- Actividad DSPDocumento2 páginasActividad DSPJefferson Parra ArizaAún no hay calificaciones
- T - Campo N°3Documento5 páginasT - Campo N°3Carlos Eduardo Chomba SorianoAún no hay calificaciones
- 4.3 Teoremas de TraslacionDocumento8 páginas4.3 Teoremas de TraslacionKylie PayneAún no hay calificaciones
- Modelado Matemático de Sistemas FísicosDocumento44 páginasModelado Matemático de Sistemas FísicosRicardoSntiagoAún no hay calificaciones
- DistanceDocumento26 páginasDistancelilianAún no hay calificaciones
- Tarea Grupal MatemáticaDocumento4 páginasTarea Grupal MatemáticaGiovanni ZamudioAún no hay calificaciones
- Unidad III Sistemas LitceDocumento8 páginasUnidad III Sistemas LitceCarlos Gomez0% (1)
- Análisis de señales y sistemas ESCUELA POLITÉCNICA NACIONALDocumento3 páginasAnálisis de señales y sistemas ESCUELA POLITÉCNICA NACIONALHenry CalderónAún no hay calificaciones
- Universidad de Sonora: Reporte de Práctica de Señales Analógicas y DigitalesDocumento22 páginasUniversidad de Sonora: Reporte de Práctica de Señales Analógicas y DigitalesFabian CastilloAún no hay calificaciones
- Espacio de EstadosDocumento18 páginasEspacio de EstadosCristian AndradeAún no hay calificaciones
- DeberDocumento9 páginasDeberHannibal EncaladaAún no hay calificaciones
- Sistemas y circuitos - problemas de convolución y sistemas LTIDocumento25 páginasSistemas y circuitos - problemas de convolución y sistemas LTICherpolAún no hay calificaciones
- Taller C1 Control ModernoDocumento2 páginasTaller C1 Control ModernoManuel Tapiero VanegasAún no hay calificaciones
- Taller PreparatorioDocumento4 páginasTaller PreparatorioMANUEL JOSE ARANGUREN CHIBUQUEAún no hay calificaciones
- 2020-08-05 - Segunda Clase - Modelo Matematico de Un Sistema de 1er OrdenDocumento17 páginas2020-08-05 - Segunda Clase - Modelo Matematico de Un Sistema de 1er OrdenMichin TheCatAún no hay calificaciones
- RA Ord15 SolDocumento7 páginasRA Ord15 SolCarlos Roman ZarzaAún no hay calificaciones
- Actividad Unidad 2Documento6 páginasActividad Unidad 2Jorge Fabian GualteroAún no hay calificaciones
- Deber1 2020ADocumento2 páginasDeber1 2020AJACOB ALEJANDRO RIERA MEDIAVILLAAún no hay calificaciones
- FRJJDocumento2 páginasFRJJEduardoAún no hay calificaciones
- C09-Sistemas de Orden SuperiorDocumento12 páginasC09-Sistemas de Orden SuperiorRogger FDAún no hay calificaciones
- Taller 2 2018BDocumento1 páginaTaller 2 2018BgesdvgsAún no hay calificaciones
- MT227B Unidad 2a Respuesta Temporal de Sistemas Fisicos Modelados en EE 2022-1Documento61 páginasMT227B Unidad 2a Respuesta Temporal de Sistemas Fisicos Modelados en EE 2022-1Gabriel JGAún no hay calificaciones
- PC4 Ee648 Fiee UniDocumento2 páginasPC4 Ee648 Fiee UniDavidAún no hay calificaciones
- Capítulo4 EE647MDocumento23 páginasCapítulo4 EE647MJOSE FREDDI SAAVEDRA BAYONAAún no hay calificaciones
- Tarea 2 Semana 5Documento3 páginasTarea 2 Semana 5Luis Alberto VelasquezAún no hay calificaciones
- 03-Análisis TemporalDocumento3 páginas03-Análisis Temporalpablo rodriguezAún no hay calificaciones
- Diseño de Un Control Por Ubicación de PolosDocumento6 páginasDiseño de Un Control Por Ubicación de PolosSuave VillegasAún no hay calificaciones
- Tarea 2 Control AnalogoDocumento22 páginasTarea 2 Control Analogoerick DHoz100% (1)
- Las 5 Mejores Empresas para Trabajar en Manabi - Fabula de La Hormiguita - Joaquin Gomez El Empleado PerfectoDocumento13 páginasLas 5 Mejores Empresas para Trabajar en Manabi - Fabula de La Hormiguita - Joaquin Gomez El Empleado PerfectocristhianchumoAún no hay calificaciones
- Mitos y Leyendas Repaso 5 MarzoDocumento6 páginasMitos y Leyendas Repaso 5 MarzoChery Alejandra Pavez GonzalezAún no hay calificaciones
- Informe Tecnico Modelo Memoria Descriptiva de Un ProyectoDocumento7 páginasInforme Tecnico Modelo Memoria Descriptiva de Un Proyectoanamaria307Aún no hay calificaciones
- ntp-350011-1 2004Documento46 páginasntp-350011-1 2004Giancarlos Huaraca LuceroAún no hay calificaciones
- Guía # 1 Introducción Al Estudio de La ÉticaDocumento15 páginasGuía # 1 Introducción Al Estudio de La Éticairma Areli GalloAún no hay calificaciones
- ESCUELAS de La ProspectivaDocumento11 páginasESCUELAS de La ProspectivaLuis Yordy Ramos SucaAún no hay calificaciones
- Hoja de Trabajo Ii Hombre Ciencia y Filosofia - EstudianteDocumento5 páginasHoja de Trabajo Ii Hombre Ciencia y Filosofia - EstudianteImer SalgueroAún no hay calificaciones
- s15 Sec 2 Guia Matematica Dia 3 4Documento6 páginass15 Sec 2 Guia Matematica Dia 3 4Zinthia Rosal Calderon MontoyaAún no hay calificaciones
- Ejercicios de Variable Compleja PDFDocumento6 páginasEjercicios de Variable Compleja PDFalex240574Aún no hay calificaciones
- Metodología de la enseñanza y las condiciones vitales de la educaciónDocumento34 páginasMetodología de la enseñanza y las condiciones vitales de la educaciónSimón FelizAún no hay calificaciones
- Condiciones Uso IDSEDocumento3 páginasCondiciones Uso IDSEcompras consorcioAún no hay calificaciones
- Taller: Convivencia, Basada en El Respeto Por Sí Mismo Y Los OtrosDocumento2 páginasTaller: Convivencia, Basada en El Respeto Por Sí Mismo Y Los OtrosMaria Carla Rocio Fabian AjayaAún no hay calificaciones
- Comunicación de ObservacionesDocumento19 páginasComunicación de ObservacionesPAOLA ANDREA MUÑOZ AGUIRREAún no hay calificaciones
- 04 - 09 - TALLER - Concepto - Estructuras AlgorítmicasDocumento3 páginas04 - 09 - TALLER - Concepto - Estructuras AlgorítmicasIng. Kevin García AguilarAún no hay calificaciones
- Mic U1 Ea KaapDocumento8 páginasMic U1 Ea KaapkaremAún no hay calificaciones
- Identificación de La Guia de Aprenizaje: Proceso de Gestión de Formación Profesional Integral Formato Guía de AprendizajeDocumento20 páginasIdentificación de La Guia de Aprenizaje: Proceso de Gestión de Formación Profesional Integral Formato Guía de AprendizajeSERGIO DANIEL CASAS REINAAún no hay calificaciones
- Lenguaje de Marcas MultimediaDocumento34 páginasLenguaje de Marcas MultimediaAngel HernandezAún no hay calificaciones
- Experiencias de emprendimiento: Secretos de Brett Schklar para el éxitoDocumento3 páginasExperiencias de emprendimiento: Secretos de Brett Schklar para el éxitoHumy Sarai OseguedaAún no hay calificaciones
- Tuberías en paralelo: Cálculo de caudales y pérdidas de cargaDocumento14 páginasTuberías en paralelo: Cálculo de caudales y pérdidas de cargaSebastian Martinez Garcia0% (1)
- Ide U1 Ea MagpDocumento7 páginasIde U1 Ea MagpMatilde García PérezAún no hay calificaciones
- Fds Desmolub CA-01 (05-01-04-2016) Fds PDFDocumento8 páginasFds Desmolub CA-01 (05-01-04-2016) Fds PDFLluís FontAún no hay calificaciones
- Trabajo de Letra - S.O.V.JDocumento22 páginasTrabajo de Letra - S.O.V.Jcalvin Monta�o lunaAún no hay calificaciones
- Interpretación de ResultadosDocumento2 páginasInterpretación de ResultadosaиDıı яaMiяeẕAún no hay calificaciones