También podría gustarte
- Siembra y trasplante de cultivos hortícolas y flor cortada. AGAH0108De EverandSiembra y trasplante de cultivos hortícolas y flor cortada. AGAH0108Aún no hay calificaciones
- Análisis de Imágenes Multiespectrales Adquiridas Con Vehículos Aéreos No TripuladosDocumento21 páginasAnálisis de Imágenes Multiespectrales Adquiridas Con Vehículos Aéreos No TripuladosArnold Rodriguez CarbajalAún no hay calificaciones
- La agricultura de precisión y herramientas TIC de apoyoDe EverandLa agricultura de precisión y herramientas TIC de apoyoAún no hay calificaciones
- 1585 3418 3 PBDocumento16 páginas1585 3418 3 PBalberto jayaAún no hay calificaciones
- 2020 Agricultura Precision DronesDocumento12 páginas2020 Agricultura Precision DronesEdgar Barrios YucraAún no hay calificaciones
- Plantilla - Auxiliar de InvestigaciónDocumento8 páginasPlantilla - Auxiliar de Investigaciónwalter garzonAún no hay calificaciones
- 94-Texto Del Artículo-281-1-10-20190903Documento9 páginas94-Texto Del Artículo-281-1-10-20190903EDWIN DUVÁN SOACHE RODRÍGUEZAún no hay calificaciones
- Santamaria Jose InvestigacionAgriculturadePrecisionDocumento12 páginasSantamaria Jose InvestigacionAgriculturadePrecisionRolando J. ValleAún no hay calificaciones
- Entrega Previa 1 - Escenario 3Documento8 páginasEntrega Previa 1 - Escenario 3oscar perdomo baronAún no hay calificaciones
- INIADocumento5 páginasINIALeonardo Ivan Rantul QuintanillaAún no hay calificaciones
- Proyecto ENTREGA 2Documento12 páginasProyecto ENTREGA 2oscar perdomo baronAún no hay calificaciones
- El Uso La Teledetección en La Caracterización de Cultivos Mediante La Aplicación de Índices de Vegetación (Aspectos ConceptualesDocumento15 páginasEl Uso La Teledetección en La Caracterización de Cultivos Mediante La Aplicación de Índices de Vegetación (Aspectos ConceptualesRaul MartinezAún no hay calificaciones
- Teledeteccion AgricolaDocumento4 páginasTeledeteccion Agricolarickky20Aún no hay calificaciones
- Boletin AvancesDocumento13 páginasBoletin AvancesAdministration classAún no hay calificaciones
- Estudio de Indices de Vegetación A Partir de Imágenes Aéreas PDFDocumento78 páginasEstudio de Indices de Vegetación A Partir de Imágenes Aéreas PDFwildarctic100% (1)
- 2-Modelo de Lista de Personal Autorizado A ZARDocumento39 páginas2-Modelo de Lista de Personal Autorizado A ZARraquelAún no hay calificaciones
- Monografia Agricultura de Precision AAAAADocumento27 páginasMonografia Agricultura de Precision AAAAAUlises Pérez RolónAún no hay calificaciones
- Uso de Los Drones en Produccion Animal SostenibleDocumento4 páginasUso de Los Drones en Produccion Animal Sosteniblegraziab24Aún no hay calificaciones
- Maquinarias y Heramientas Utilzidas en La Agricultira y Proyecto ProductivoDocumento8 páginasMaquinarias y Heramientas Utilzidas en La Agricultira y Proyecto ProductivoLIZETH MARCELA CUELLO BARROSAún no hay calificaciones
- Drones para AgriculturaDocumento5 páginasDrones para AgriculturaEnrique SantanaAún no hay calificaciones
- Diseño e Ingeniería en Ambientes ControladosDocumento3 páginasDiseño e Ingeniería en Ambientes Controladosaraujojavier403Aún no hay calificaciones
- Predicción de CosechaDocumento9 páginasPredicción de CosechaParajeInnovaAún no hay calificaciones
- Tpe Sig Und2Documento3 páginasTpe Sig Und2Gloria Alexandra Obando JaramilloAún no hay calificaciones
- Proyecto Final - Uso de Drones en La Agricultura Panameña - GRUPO DDocumento34 páginasProyecto Final - Uso de Drones en La Agricultura Panameña - GRUPO DCaro Campos100% (1)
- Tecnologia en La AgriculturaDocumento10 páginasTecnologia en La AgriculturaRandy Noé Avilez MontalvoAún no hay calificaciones
- Grupo - 36 - Fase 4 Tecnologías Aplicables, Calibración y Verificación.Documento16 páginasGrupo - 36 - Fase 4 Tecnologías Aplicables, Calibración y Verificación.Angela BastidasAún no hay calificaciones
- Agricultura Precisión Informe 2Documento8 páginasAgricultura Precisión Informe 2Nikolas CardenasAún no hay calificaciones
- Boletín Monitoreo de Predios - FloresDocumento1 páginaBoletín Monitoreo de Predios - FloresCEDAITAún no hay calificaciones
- 3249 12834 1 PBDocumento7 páginas3249 12834 1 PBd421Aún no hay calificaciones
- Drones en La AgriculturaDocumento9 páginasDrones en La AgriculturaMaryori Yulieth DominguezAún no hay calificaciones
- Drones en La AgriculturaDocumento12 páginasDrones en La Agriculturafranciscaaguirre2464Aún no hay calificaciones
- Fotogrametria en La AgronomiaDocumento6 páginasFotogrametria en La Agronomiajenner cotuc100% (1)
- Berrío V., Mosquera J. (2015) Uso de Drones para El Análisis de Imágenes Multiespectrales en Agricultura de PrecisiónDocumento14 páginasBerrío V., Mosquera J. (2015) Uso de Drones para El Análisis de Imágenes Multiespectrales en Agricultura de PrecisiónYésica Xiomara Daza CruzAún no hay calificaciones
- Asilvaortiz, Art 12Documento11 páginasAsilvaortiz, Art 12Alejandro SalamancaAún no hay calificaciones
- Manejo de App DronesDocumento73 páginasManejo de App DronesptorresmoAún no hay calificaciones
- de AgrimensuraDocumento145 páginasde AgrimensuraEliecer CorreaAún no hay calificaciones
- Drones en La Industria Agraria de PanamaDocumento7 páginasDrones en La Industria Agraria de PanamaOrquídea QuinteroAún no hay calificaciones
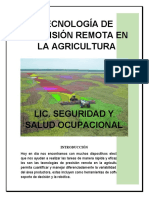
- Tecnología de Precisión Remota en La AgriculturaDocumento7 páginasTecnología de Precisión Remota en La AgriculturaNadyaAún no hay calificaciones
- Teledetección en La AgriculturaDocumento4 páginasTeledetección en La AgriculturamicroimagesAún no hay calificaciones
- Clima HortalizaDocumento25 páginasClima HortalizaJosé Rafael RodríguezAún no hay calificaciones
- Tecnología de Precisión Remota en La AgriculturaDocumento7 páginasTecnología de Precisión Remota en La Agriculturalidia rodríguezAún no hay calificaciones
- Alvarez Zanelli, E. Desarrollo de Un Método de Estimación de Rendimiento de Cultivos..Documento116 páginasAlvarez Zanelli, E. Desarrollo de Un Método de Estimación de Rendimiento de Cultivos..Evl UesixAún no hay calificaciones
- Agricultura Precision RentabilidadDocumento12 páginasAgricultura Precision Rentabilidadcova5609Aún no hay calificaciones
- Xue & Su - Significant Remote Sensing Vegetation Indices (Articulo2017) - TraducidoDocumento22 páginasXue & Su - Significant Remote Sensing Vegetation Indices (Articulo2017) - Traducidogina leonAún no hay calificaciones
- Agricultura de PrecisionDocumento3 páginasAgricultura de PrecisionDavid Verdejo VazquezAún no hay calificaciones
- Agricultura de PrecisionDocumento3 páginasAgricultura de PrecisionDavid Verdejo VazquezAún no hay calificaciones
- Uso de Drones para El Analisis de Imagenes Multies PDFDocumento14 páginasUso de Drones para El Analisis de Imagenes Multies PDFSTEPHAAún no hay calificaciones
- Trabajo Final de Investigacion 3Documento31 páginasTrabajo Final de Investigacion 3JOSEAún no hay calificaciones
- Bonilla González Jorge Leonardo 2016Documento174 páginasBonilla González Jorge Leonardo 2016Diana Vega MinayaAún no hay calificaciones
- Agricultura de PrecisiónDocumento9 páginasAgricultura de PrecisiónalejandracabanillashuamaniAún no hay calificaciones
- Fase 4 - 63 Tecnologías Aplicables, Calibración y VerificaciónDocumento20 páginasFase 4 - 63 Tecnologías Aplicables, Calibración y VerificaciónDiego PinchaoAún no hay calificaciones
- Drones MultiespectralDocumento5 páginasDrones MultiespectralJuan AndresAún no hay calificaciones
- Tecnologias de Agricultura de Precisiã"nDocumento14 páginasTecnologias de Agricultura de Precisiã"nHugo Araya CaniviloAún no hay calificaciones
- Sensores RemotosDocumento5 páginasSensores Remotosmauricio calderonAún no hay calificaciones
- Uso de Imágenes RGB en Pasturas para Analizar El Cambio de Producción y Valor NutritivoDocumento5 páginasUso de Imágenes RGB en Pasturas para Analizar El Cambio de Producción y Valor NutritivojuanseAún no hay calificaciones
- Tecnología de Precisión RemotaDocumento7 páginasTecnología de Precisión RemotaGenesys Pauleth Moreno CruzAún no hay calificaciones
- TELEDETECCION SERVIFAPA Revisada2Documento41 páginasTELEDETECCION SERVIFAPA Revisada2Administration classAún no hay calificaciones
- Sensores IndustrialesDocumento5 páginasSensores IndustrialesCristhian Xavier Macias MoreiraAún no hay calificaciones
- Articulo CientificoDocumento22 páginasArticulo CientificoMario Gualli100% (1)
- 3 Guia TP FyMS Completa (2013) (Con Anexos)Documento284 páginas3 Guia TP FyMS Completa (2013) (Con Anexos)wuariAún no hay calificaciones
- Medidas de EvaporaciónDocumento8 páginasMedidas de Evaporaciónmovies and series freeAún no hay calificaciones
- Tesis Liliam Garzon Uae-2017Documento76 páginasTesis Liliam Garzon Uae-2017movies and series freeAún no hay calificaciones
- Polysulphate Booklet SP NewDocumento13 páginasPolysulphate Booklet SP Newmovies and series freeAún no hay calificaciones
- Escuela Superior Politécnica Del Litoral: Steve Aguirre Wong Julio Pintag Sanga Walter Ramírez BoccaDocumento382 páginasEscuela Superior Politécnica Del Litoral: Steve Aguirre Wong Julio Pintag Sanga Walter Ramírez Boccamovies and series freeAún no hay calificaciones
- Tesis Final de Las FinalesssssDocumento57 páginasTesis Final de Las Finalesssssmovies and series freeAún no hay calificaciones
- TFG Gonzalez Gines 2022Documento119 páginasTFG Gonzalez Gines 2022movies and series freeAún no hay calificaciones
- Caso de EstudioDocumento4 páginasCaso de Estudiomovies and series freeAún no hay calificaciones
- Caso de Estudio - Taller 2Documento4 páginasCaso de Estudio - Taller 2movies and series freeAún no hay calificaciones
- Ougi Formula - OwarimonogatariDocumento17 páginasOugi Formula - OwarimonogatariVincen Morán GarcíaAún no hay calificaciones
- Del Aguila - PCA-SDDocumento87 páginasDel Aguila - PCA-SDangela oyolaAún no hay calificaciones
- X-Ray Architecture: Colomina, Beatriz: Amazon - Com.mx: LibrosDocumento4 páginasX-Ray Architecture: Colomina, Beatriz: Amazon - Com.mx: LibrosRodrigo AlcocerAún no hay calificaciones
- DuneDocumento60 páginasDuneViviana Hernández100% (1)
- 09 Manual ML65X PDFDocumento78 páginas09 Manual ML65X PDFangel martinez100% (3)
- 6to Proyecto 2 Lenguajes Soy Pasado y Presente, Soy Mis Raices y Mi Presente.Documento8 páginas6to Proyecto 2 Lenguajes Soy Pasado y Presente, Soy Mis Raices y Mi Presente.César PradoAún no hay calificaciones
- Prblema 3Documento8 páginasPrblema 3Jeremy Jesus CASTILLO BRIONESAún no hay calificaciones
- Cuáles Son Las Zonas o Husos UTM en Los Cuales Se Encuentra Guatemala y Las Letras Que Le Corresponden en LalitudDocumento1 páginaCuáles Son Las Zonas o Husos UTM en Los Cuales Se Encuentra Guatemala y Las Letras Que Le Corresponden en LalitudDannyKllKbreraAún no hay calificaciones
- Iso 17999 2005Documento3 páginasIso 17999 2005GloriaAún no hay calificaciones
- Introducción A La Programación Orientada A ObjetosDocumento7 páginasIntroducción A La Programación Orientada A ObjetosJosué López Acosta100% (7)
- Prueba de Texto La Pata Del DiabloDocumento13 páginasPrueba de Texto La Pata Del DiabloMiriam Luza100% (1)
- Actividad No CooperativismoDocumento9 páginasActividad No CooperativismoYENNY ALEXANDRA DIAZ BENITEZAún no hay calificaciones
- Sendero Jardín El BalsalDocumento2 páginasSendero Jardín El BalsalGavi Rodriguez0% (1)
- Douglass C. North Entre La Teoria y La Historia Económica, Saavedra Restrepo, María Claudia PDFDocumento14 páginasDouglass C. North Entre La Teoria y La Historia Económica, Saavedra Restrepo, María Claudia PDFlupisbonisAún no hay calificaciones
- Caracterizacion AmbientalDocumento13 páginasCaracterizacion Ambientalandersson75% (4)
- Optimización de Funciones RealesDocumento4 páginasOptimización de Funciones RealesObregon JonyAún no hay calificaciones
- Parámetros Z, Y, H, T, SDocumento20 páginasParámetros Z, Y, H, T, SArturo LópezAún no hay calificaciones
- Qué Es Intervención en CrisisDocumento4 páginasQué Es Intervención en CrisisCarlos Alejandro Mendoza MartinezAún no hay calificaciones
- Momento 2 - Identidad y VirtualidadDocumento4 páginasMomento 2 - Identidad y VirtualidadAury Esther Gonzalez DiazAún no hay calificaciones
- Topografía IDocumento8 páginasTopografía IgaruAún no hay calificaciones
- Acero Planchas-Estructurales-ASTM-A572 - A-572M - Final - 1 PDFDocumento2 páginasAcero Planchas-Estructurales-ASTM-A572 - A-572M - Final - 1 PDFantonioAún no hay calificaciones
- Clasificacion de Enfermedades en Las PlantasDocumento3 páginasClasificacion de Enfermedades en Las PlantasOmar BaltaAún no hay calificaciones
- PadinDocumento14 páginasPadinCristian MennilloAún no hay calificaciones
- El Arte de Hacer Una VisitaDocumento19 páginasEl Arte de Hacer Una VisitaJESSICA CACERES0% (1)
- P-TP-OPE-009 Instalacion de LamparasDocumento4 páginasP-TP-OPE-009 Instalacion de LamparasRony Medina MedinaAún no hay calificaciones
- Ejemplo de Ruta CriticaDocumento11 páginasEjemplo de Ruta CriticaLuisFernandoVinanPelaezAún no hay calificaciones
- Sesion 1 - Personal Social - Expresar Emociones - 3er GradoDocumento7 páginasSesion 1 - Personal Social - Expresar Emociones - 3er GradoLilavati Morales Guivin100% (1)
- La Arquitectura de La Raíz Dependerá Del FósforoDocumento12 páginasLa Arquitectura de La Raíz Dependerá Del FósforoJosue Velasquez RamosAún no hay calificaciones
- Capitulo #10 Circuitos de Corriente AlternauaDocumento45 páginasCapitulo #10 Circuitos de Corriente AlternauaSucari Juan De DiosAún no hay calificaciones
- Por Qué Se Utilizan GalicismosDocumento4 páginasPor Qué Se Utilizan GalicismosDavid ParejoAún no hay calificaciones
- La biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetDe EverandLa biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetCalificación: 5 de 5 estrellas5/5 (7)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- 44 Apps Inteligentes para Ejercitar su Cerebro: Apps Gratuitas, Juegos, y Herramientas para iPhone, iPad, Google Play, Kindle Fire, Navegadores de Internet, Windows Phone, & Apple WatchDe Everand44 Apps Inteligentes para Ejercitar su Cerebro: Apps Gratuitas, Juegos, y Herramientas para iPhone, iPad, Google Play, Kindle Fire, Navegadores de Internet, Windows Phone, & Apple WatchCalificación: 3.5 de 5 estrellas3.5/5 (2)
- Toma de decisiones en las empresas: Entre el arte y la técnica: Metodologías, modelos y herramientasDe EverandToma de decisiones en las empresas: Entre el arte y la técnica: Metodologías, modelos y herramientasAún no hay calificaciones
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressDe EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressCalificación: 5 de 5 estrellas5/5 (1)
- GuíaBurros Microsoft Excel: Todo lo que necesitas saber sobre esta potente hoja de cálculoDe EverandGuíaBurros Microsoft Excel: Todo lo que necesitas saber sobre esta potente hoja de cálculoCalificación: 3.5 de 5 estrellas3.5/5 (6)
- Agile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanDe EverandAgile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanCalificación: 5 de 5 estrellas5/5 (1)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosDe EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosCalificación: 4 de 5 estrellas4/5 (16)
- Guía De Hacking De Computadora Para Principiantes: Cómo Hackear Una Red Inalámbrica Seguridad Básica Y Pruebas De Penetración Kali Linux Su Primer HackDe EverandGuía De Hacking De Computadora Para Principiantes: Cómo Hackear Una Red Inalámbrica Seguridad Básica Y Pruebas De Penetración Kali Linux Su Primer HackAún no hay calificaciones
- Fundamentos de bases de datos: Notas de referenciaDe EverandFundamentos de bases de datos: Notas de referenciaAún no hay calificaciones
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Cultura y clima: fundamentos para el cambio en la organizaciónDe EverandCultura y clima: fundamentos para el cambio en la organizaciónAún no hay calificaciones
- Guía para principiantes. Color y creatividadDe EverandGuía para principiantes. Color y creatividadCalificación: 4.5 de 5 estrellas4.5/5 (3)
- Criptografía sin secretos con Python: Spyware/Programa espíaDe EverandCriptografía sin secretos con Python: Spyware/Programa espíaCalificación: 5 de 5 estrellas5/5 (4)
- Cómo ser una Persona más Sociable: Aprende a hablar con cualquiera sin temor e incrementa por completo tu inteligencia socialDe EverandCómo ser una Persona más Sociable: Aprende a hablar con cualquiera sin temor e incrementa por completo tu inteligencia socialCalificación: 4.5 de 5 estrellas4.5/5 (34)
- La Red de Todo: Internet de las Cosas y el Futuro de la Economia ConectadaDe EverandLa Red de Todo: Internet de las Cosas y el Futuro de la Economia ConectadaCalificación: 4 de 5 estrellas4/5 (12)
- Python Deep Learning: Introducción práctica con Keras y TensorFlow 2De EverandPython Deep Learning: Introducción práctica con Keras y TensorFlow 2Calificación: 3.5 de 5 estrellas3.5/5 (5)
- PENSAR E INVERTIR COMO WARREN BUFFETT. El manual que revela las estrategias y la mentalidad del mayor inversionista de todos los tiempos.De EverandPENSAR E INVERTIR COMO WARREN BUFFETT. El manual que revela las estrategias y la mentalidad del mayor inversionista de todos los tiempos.Calificación: 4.5 de 5 estrellas4.5/5 (32)
- Aprender Docker, un enfoque prácticoDe EverandAprender Docker, un enfoque prácticoCalificación: 5 de 5 estrellas5/5 (3)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Ciberseguridad: ¿Por qué es importante para todos?De EverandCiberseguridad: ¿Por qué es importante para todos?Aún no hay calificaciones