También podría gustarte
- Tarea 4 - Grupo - 100412 - 57Documento26 páginasTarea 4 - Grupo - 100412 - 57LEO JMDAún no hay calificaciones
- Ecuaciones diferenciales método series potencia y transformada LaplaceDocumento23 páginasEcuaciones diferenciales método series potencia y transformada LaplaceWilliam SanchezAún no hay calificaciones
- Dte 13MDocumento9 páginasDte 13MGina Biondo100% (1)
- Ecuaciones Diferenciales Ordinarias Lineales de Orden SuperiorDocumento60 páginasEcuaciones Diferenciales Ordinarias Lineales de Orden SuperiorWALTER OMAR GARCIA LUCEROAún no hay calificaciones
- Medi2 U1 A1 MastDocumento4 páginasMedi2 U1 A1 MastElizabet CastilloAún no hay calificaciones
- Ecuaciones DiferencialDocumento23 páginasEcuaciones DiferencialANDRES DURANAún no hay calificaciones
- Sistemas lineales de primer ordenDocumento23 páginasSistemas lineales de primer ordenElizabet CastilloAún no hay calificaciones
- Tema2-SistEcLineales - StudiumDocumento23 páginasTema2-SistEcLineales - StudiumJuan PuertasAún no hay calificaciones
- Regresion Lineal MultipleDocumento4 páginasRegresion Lineal MultipleGabriel FrancoAún no hay calificaciones
- de Clase Semana 13Documento29 páginasde Clase Semana 13Jose Luis Talaverano NajarroAún no hay calificaciones
- 4 Yanira Rodriguez-David RicoDocumento29 páginas4 Yanira Rodriguez-David Ricodavid rikoAún no hay calificaciones
- Sistemas de ecuaciones para resolver problemas de cantidad de bolsas, sacos y vehículosDocumento23 páginasSistemas de ecuaciones para resolver problemas de cantidad de bolsas, sacos y vehículosFELIPE CRISPOLO GUERRERO GUERREROAún no hay calificaciones
- Ecuaciones Diferenciales Actividad 4Documento30 páginasEcuaciones Diferenciales Actividad 4A996Aún no hay calificaciones
- EjerciciosDocumento9 páginasEjerciciossantiago martinez bocanegraAún no hay calificaciones
- Ma463 - Libro Digital Solución de Una Edo Por Serie de PotenciasDocumento8 páginasMa463 - Libro Digital Solución de Una Edo Por Serie de PotenciasMatiasAún no hay calificaciones
- ECUACIONES DE DIFERENCIAS - Segundo OrdenDocumento6 páginasECUACIONES DE DIFERENCIAS - Segundo OrdenSimon UzcateguiAún no hay calificaciones
- Anexo 1 Plantilla - Entrega - Tarea 4 Camilo ReyesDocumento21 páginasAnexo 1 Plantilla - Entrega - Tarea 4 Camilo ReyesCAMILOREYES24Aún no hay calificaciones
- Semana 15Documento36 páginasSemana 15David Contreras EspejoAún no hay calificaciones
- Tema 1Documento21 páginasTema 1Laura CedrónAún no hay calificaciones
- Taller Semana 13Documento12 páginasTaller Semana 13NFXAún no hay calificaciones
- Wa0004 PDFDocumento4 páginasWa0004 PDFFiorela ArellanoAún no hay calificaciones
- Unidad II Módullo5 Lección5.1Documento17 páginasUnidad II Módullo5 Lección5.1Karen ArangoAún no hay calificaciones
- de Clase Semana 13Documento29 páginasde Clase Semana 13ROCAYAún no hay calificaciones
- S16.s1-Ec - Dif-Serie de PotenciaDocumento19 páginasS16.s1-Ec - Dif-Serie de PotenciaAlejandro Renato Rengifo LedesmaAún no hay calificaciones
- Formulario EDO Orden Superior 2022IDocumento4 páginasFormulario EDO Orden Superior 2022IVictor Antonio PGAún no hay calificaciones
- Métodos de Los Valores Propios y Vectores PropiosDocumento11 páginasMétodos de Los Valores Propios y Vectores PropiosRobert Valladolid SullonAún no hay calificaciones
- Sistemas Diferenciales Lineales: Resolución mediante DiagonalizaciónDocumento17 páginasSistemas Diferenciales Lineales: Resolución mediante Diagonalizacióndaniela ordoñezAún no hay calificaciones
- Ecuaciones Diferenciales Método Por Series de Potencia Y Transformada de LaplaceDocumento33 páginasEcuaciones Diferenciales Método Por Series de Potencia Y Transformada de LaplaceLaura Valentina Gaitan GamezAún no hay calificaciones
- Actividad Evaluativa Eje 2 Matematicas EspecialesDocumento15 páginasActividad Evaluativa Eje 2 Matematicas EspecialesJuan Camilo lara rojasAún no hay calificaciones
- Unidad 1 - Fase 3 - Prueba de Conocimientos Unidad 1Documento12 páginasUnidad 1 - Fase 3 - Prueba de Conocimientos Unidad 1SilviaAún no hay calificaciones
- Clase 7 Sist Ecuac 2020 AGIDocumento27 páginasClase 7 Sist Ecuac 2020 AGIClases Estabilidad 2Aún no hay calificaciones
- Semana XDocumento5 páginasSemana XangelAún no hay calificaciones
- Valores y Vectores Propios 08-09-22Documento41 páginasValores y Vectores Propios 08-09-22ANTONIO RONCEROSAún no hay calificaciones
- ALG.I - Unidad N8 - Sistemas de Ecuaciones Lineales - (2020)Documento7 páginasALG.I - Unidad N8 - Sistemas de Ecuaciones Lineales - (2020)santiago rodriguezAún no hay calificaciones
- MétodosNuméricosEigenDocumento32 páginasMétodosNuméricosEigenNeil Roger Rodríguez CandiaAún no hay calificaciones
- Ecuaciones Diferenciales por Series de Potencias y Transformada de LaplaceDocumento33 páginasEcuaciones Diferenciales por Series de Potencias y Transformada de LaplaceDuque Aguirre Ingrid TatianaAún no hay calificaciones
- Manual de Ejercicios. Matematica Aplicada IDocumento46 páginasManual de Ejercicios. Matematica Aplicada IAnderson Fabrini Rivera OrozcoAún no hay calificaciones
- Ecuaciones Diferenciales1Documento20 páginasEcuaciones Diferenciales1Alejo CondoríAún no hay calificaciones
- de Clase Semana 02Documento32 páginasde Clase Semana 02Juan Carlos Garay HuamanAún no hay calificaciones
- Clase Dos Semana 15Documento14 páginasClase Dos Semana 15Bryan CastroAún no hay calificaciones
- Resumen Primer Parcial GAL 1Documento9 páginasResumen Primer Parcial GAL 1pepin2020Aún no hay calificaciones
- Examen Final - Ecuaciones Diferenciales-Verano-SolucionesDocumento6 páginasExamen Final - Ecuaciones Diferenciales-Verano-SolucioneskevinAún no hay calificaciones
- Ecuaciones Diferenciales Métodos Serie Potencias y LaplaceDocumento19 páginasEcuaciones Diferenciales Métodos Serie Potencias y Laplaceelian contrerasAún no hay calificaciones
- Sistemasy MatricesDocumento28 páginasSistemasy MatricesandresAún no hay calificaciones
- EDO en Series de Potencias. C, Cuevas. V, Merlano. A, Ramirez.Documento17 páginasEDO en Series de Potencias. C, Cuevas. V, Merlano. A, Ramirez.Victor MerlanoAún no hay calificaciones
- Tema 2 PDFDocumento24 páginasTema 2 PDFLotfi ZadehAún no hay calificaciones
- Expo Parte 2Documento4 páginasExpo Parte 2Wladimir Alejandro Silva CasteloAún no hay calificaciones
- S05.s1 Ecuaciones Lineales de Orden Superior HomogeneasDocumento21 páginasS05.s1 Ecuaciones Lineales de Orden Superior HomogeneasMariela MacoAún no hay calificaciones
- PRESVIRTUAL V.V.PROPIOSDocumento12 páginasPRESVIRTUAL V.V.PROPIOSIsmael Villca ColqueAún no hay calificaciones
- 1 - Introduccion A Las Ecuaciones DiferencialesDocumento12 páginas1 - Introduccion A Las Ecuaciones DiferencialesPAUL ESAU NARVAEZ GILERAún no hay calificaciones
- Universidad Nacional de IngenieriaDocumento62 páginasUniversidad Nacional de IngenieriaHaxel Pelayo GarciaAún no hay calificaciones
- Tarea 4 - Series de Potencia y Trasformada de Laplace.Documento28 páginasTarea 4 - Series de Potencia y Trasformada de Laplace.Jafeth CortésAún no hay calificaciones
- Anexo 1 Plantilla - Entrega - Tarea 4Documento27 páginasAnexo 1 Plantilla - Entrega - Tarea 4Camilo ValderramaAún no hay calificaciones
- UNIDAD 5 - VALORES VECTORES PROPIOS - AplicaciónDocumento7 páginasUNIDAD 5 - VALORES VECTORES PROPIOS - AplicaciónMelissa Meseguer DelgadoAún no hay calificaciones
- Resolución de EDO mediante series de potenciasDocumento15 páginasResolución de EDO mediante series de potenciasDianita Vicky100% (1)
- 1.3. - Método de EulerDocumento22 páginas1.3. - Método de EulerJuan Manuel OliverosAún no hay calificaciones
- Sobre Nilálgebras Conmutativas de Potencias AsociativasDe EverandSobre Nilálgebras Conmutativas de Potencias AsociativasAún no hay calificaciones
- Videos de Interes Clase 1 S15Documento2 páginasVideos de Interes Clase 1 S15Bryan CastroAún no hay calificaciones
- Que Es UNIXDocumento2 páginasQue Es UNIXBryan CastroAún no hay calificaciones
- Primera IntervenciónDocumento2 páginasPrimera IntervenciónBryan CastroAún no hay calificaciones
- Ejercicio 59Documento1 páginaEjercicio 59Bryan CastroAún no hay calificaciones
- Ejercicio 61Documento1 páginaEjercicio 61Bryan CastroAún no hay calificaciones
- Actividad de Aprendizaje S14Documento3 páginasActividad de Aprendizaje S14Bryan CastroAún no hay calificaciones
- Clase Uno S15Documento13 páginasClase Uno S15Bryan CastroAún no hay calificaciones
- Cuestionario Previo A La Implementación de Un Servidor MultifunciónDocumento3 páginasCuestionario Previo A La Implementación de Un Servidor MultifunciónBryan CastroAún no hay calificaciones
- Clase Dos Semana 15Documento14 páginasClase Dos Semana 15Bryan CastroAún no hay calificaciones
- Importancia de La LecturaDocumento13 páginasImportancia de La LecturaBryan CastroAún no hay calificaciones
- Contenido Clase 1 S14Documento15 páginasContenido Clase 1 S14Bryan CastroAún no hay calificaciones
- Actividad de Aprendizaje S16Documento2 páginasActividad de Aprendizaje S16Bryan CastroAún no hay calificaciones
- Fundamentos de Ingeniería de Software: Lenguaje NaturalDocumento17 páginasFundamentos de Ingeniería de Software: Lenguaje NaturalCharles ZambranoAún no hay calificaciones
- SilabusDocumento4 páginasSilabusBryan CastroAún no hay calificaciones
- SilabusDocumento4 páginasSilabusBryan CastroAún no hay calificaciones
- Fundamentos de Ingeniería de Software: Lenguaje NaturalDocumento17 páginasFundamentos de Ingeniería de Software: Lenguaje NaturalCharles ZambranoAún no hay calificaciones
- La CienciaDocumento4 páginasLa CienciaJavi Javier100% (1)
- Las Ecuaciones de Riccati Son Un Tipo Especial de Las Ecuaciones de BernoulliDocumento1 páginaLas Ecuaciones de Riccati Son Un Tipo Especial de Las Ecuaciones de BernoulliBryan CastroAún no hay calificaciones
- ConsultaDocumento2 páginasConsultaBryan CastroAún no hay calificaciones
- Fuente de VoltajeDocumento10 páginasFuente de VoltajeBryan CastroAún no hay calificaciones
- Preguntas Seguridad de Los Sistemas OperativosDocumento11 páginasPreguntas Seguridad de Los Sistemas OperativosBryan CastroAún no hay calificaciones
- Comparaciones de Cadenas AlfanumericasDocumento5 páginasComparaciones de Cadenas AlfanumericasJennifer Leticia Leyton SeguelAún no hay calificaciones
- ArquitecturaDocumento2 páginasArquitecturaBryan CastroAún no hay calificaciones
- El Amplificador OperacionalDocumento3 páginasEl Amplificador OperacionalBryan CastroAún no hay calificaciones
- Trabajo de Investigacion 1 PDFDocumento1 páginaTrabajo de Investigacion 1 PDFBryan CastroAún no hay calificaciones
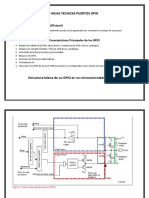
- Hojas Tecnicas Puertos GpioDocumento12 páginasHojas Tecnicas Puertos GpioBryan CastroAún no hay calificaciones
- Artículo EMU 8086Documento3 páginasArtículo EMU 8086Bryan CastroAún no hay calificaciones
- Articulo NoderedDocumento3 páginasArticulo NoderedBryan CastroAún no hay calificaciones
- ArtículoDocumento6 páginasArtículoBryan CastroAún no hay calificaciones
- Ejer ResueltosDocumento40 páginasEjer ResueltosSebastián AndrésAún no hay calificaciones
- Practica 2 Instrumental PDFDocumento13 páginasPractica 2 Instrumental PDFZUÑIGA CUEVA CESAR AARONAún no hay calificaciones
- Guia de Aprendizaje Fisica 11 IP 01fluidos ActividadDocumento4 páginasGuia de Aprendizaje Fisica 11 IP 01fluidos ActividadNico RomeAún no hay calificaciones
- Banco de PreguntasDocumento13 páginasBanco de Preguntasjhoe76Aún no hay calificaciones
- Construccion de Cuadrilateros 2Documento2 páginasConstruccion de Cuadrilateros 2Christian DelgadoAún no hay calificaciones
- Solver Es Una HerramientaDocumento4 páginasSolver Es Una HerramientaCarlos JoseAún no hay calificaciones
- ZenonDocumento4 páginasZenonDaniel Ca CeAún no hay calificaciones
- Secuencia NumeracionDocumento10 páginasSecuencia NumeracionMarita Hassan100% (1)
- Experimento VelaDocumento2 páginasExperimento VelajaderAún no hay calificaciones
- Balance Trabajo FinalDocumento10 páginasBalance Trabajo FinalJose R. FernandezAún no hay calificaciones
- La TelemetriaDocumento7 páginasLa TelemetriaRojasJosuesAún no hay calificaciones
- Informe Servomotores Brazo Rob.Documento9 páginasInforme Servomotores Brazo Rob.juan bernalAún no hay calificaciones
- Planificacion 2021 A y GA Cuatrimestrales y AnualesDocumento9 páginasPlanificacion 2021 A y GA Cuatrimestrales y AnualesEzequiel CornejoAún no hay calificaciones
- Monografia de Tratamientos Termico Del AceroDocumento33 páginasMonografia de Tratamientos Termico Del AceroJonatanGalvanRojasAún no hay calificaciones
- Marco Teorico Gladys PalmeraDocumento4 páginasMarco Teorico Gladys PalmeraAngela Stefania Perez HernandezAún no hay calificaciones
- Taller Sistemas Aplicados Tema ExcelDocumento2 páginasTaller Sistemas Aplicados Tema ExcelDavid Gonzalez TovarAún no hay calificaciones
- Parcial 2020-10 HospitalDocumento2 páginasParcial 2020-10 HospitalGabriela LozanoAún no hay calificaciones
- Aplicación de La Sobre Carga VehicularDocumento11 páginasAplicación de La Sobre Carga VehicularJorge Eduardo Acuña CortijoAún no hay calificaciones
- Taller Ciencia de Los MaterialesDocumento18 páginasTaller Ciencia de Los MaterialesCarlos Mario Perez CastillaAún no hay calificaciones
- M7 Multiplicacion y Division de EnterosDocumento1 páginaM7 Multiplicacion y Division de EnterosAnita V. Diaz Lopez100% (1)
- Temario Curso Adobe IllustratorDocumento3 páginasTemario Curso Adobe IllustratornagaAún no hay calificaciones
- 2021 1 Edu1401 3 PDFDocumento9 páginas2021 1 Edu1401 3 PDFDiego DíazAún no hay calificaciones
- Valoración de Dientes Pilares para Protesis Parcial FijaDocumento18 páginasValoración de Dientes Pilares para Protesis Parcial FijaPam FNAún no hay calificaciones
- ANOVADocumento2 páginasANOVAgabriel rodriguez mengualAún no hay calificaciones
- Memoria de Cálculo Sib GralDocumento15 páginasMemoria de Cálculo Sib GralWalter Nieves Sandi0% (1)
- Boletin Tema 6 - Cinetica Quimica PDFDocumento2 páginasBoletin Tema 6 - Cinetica Quimica PDFIsmael Fernández PazóAún no hay calificaciones
- MA-1112 Farith Guías 7-11 2016 PDFDocumento240 páginasMA-1112 Farith Guías 7-11 2016 PDFfernando_alvrzAún no hay calificaciones
- (Microsoft Word - TFM - UNED - Procesos de Conformado de Materiales Polim - 351ricos Por Prototipado R - 341pidoDocumento58 páginas(Microsoft Word - TFM - UNED - Procesos de Conformado de Materiales Polim - 351ricos Por Prototipado R - 341pidoDavid Arias RubioAún no hay calificaciones