También podría gustarte
- EDO CONTENIDO CLASE No. 31 CONVOLUCIÓNDocumento15 páginasEDO CONTENIDO CLASE No. 31 CONVOLUCIÓNmarlon suntaxiAún no hay calificaciones
- Contenido Clase 1 S14Documento15 páginasContenido Clase 1 S14Bryan CastroAún no hay calificaciones
- 02 - Problemas Resueltos de Integral DefinidaDocumento8 páginas02 - Problemas Resueltos de Integral Definidagm174653Aún no hay calificaciones
- Curso básico de teoría de númerosDe EverandCurso básico de teoría de númerosCalificación: 5 de 5 estrellas5/5 (2)
- 03 - Integración Por PartesDocumento12 páginas03 - Integración Por PartesJoaquinAún no hay calificaciones
- PC3 2021 02 DesarrolladaDocumento4 páginasPC3 2021 02 DesarrolladaAndrea NikolAún no hay calificaciones
- PC3 2021 1 DesarrolladaDocumento4 páginasPC3 2021 1 DesarrolladaKenyi AguilarAún no hay calificaciones
- Capitulo 2.2Documento4 páginasCapitulo 2.2HelenAún no hay calificaciones
- EJERCICIOS Geometria DiferencialDocumento2 páginasEJERCICIOS Geometria DiferencialVanessa AgüeroAún no hay calificaciones
- Guia 4 2021Documento12 páginasGuia 4 2021ricardo sanhuezaAún no hay calificaciones
- Contenido Clase Dos S14Documento13 páginasContenido Clase Dos S14Bryan CastroAún no hay calificaciones
- Ex. Final Ee588 - Fiee UniDocumento6 páginasEx. Final Ee588 - Fiee UniDavidAún no hay calificaciones
- CAPITULO 6 E.D.L. de Orden Superior de C.V PDFDocumento5 páginasCAPITULO 6 E.D.L. de Orden Superior de C.V PDFRoly Capari ChAún no hay calificaciones
- PC3 - ED-2021-1-desarrolladaDocumento4 páginasPC3 - ED-2021-1-desarrolladaJADIRAAún no hay calificaciones
- Informe Del Teorema de Stokes 2018Documento5 páginasInforme Del Teorema de Stokes 2018Klissman AlvaradoAún no hay calificaciones
- Numeros ComplejosDocumento29 páginasNumeros ComplejosReitchell Peithon Rey DiazAún no hay calificaciones
- Ecuaciones Diferenciales Ordinarias - DeberN°5 - Transformación de Laplace - Rivera Tapia Andrés JesúsDocumento7 páginasEcuaciones Diferenciales Ordinarias - DeberN°5 - Transformación de Laplace - Rivera Tapia Andrés JesúsPANDAAún no hay calificaciones
- Hoja de Trabajo Matematica 1 ArquitecturaDocumento13 páginasHoja de Trabajo Matematica 1 ArquitecturaJoximar MoriAún no hay calificaciones
- Longitud de Arco (Final)Documento20 páginasLongitud de Arco (Final)Leyter Rebaza Narro0% (1)
- Act2 Mpi2 JcaDocumento6 páginasAct2 Mpi2 JcaJuann Antonio100% (1)
- Clases Calculo 2Documento97 páginasClases Calculo 2CARLOS ALBERTO MUNOZ ALVEARAún no hay calificaciones
- S03. s1 - MATERIAL - SOLUCIONDocumento19 páginasS03. s1 - MATERIAL - SOLUCIONJonathan Lucano RojasAún no hay calificaciones
- Series de FourierDocumento13 páginasSeries de FourierBrandon VillegasAún no hay calificaciones
- Metodo de Arandeles FinalDocumento8 páginasMetodo de Arandeles Finalsebastian minaAún no hay calificaciones
- BCMV U3 A2 AdmrDocumento5 páginasBCMV U3 A2 AdmrÂdolfo MenesesAún no hay calificaciones
- 2° Examen ParcialDocumento3 páginas2° Examen ParcialÁngel Arsas NoctusAún no hay calificaciones
- Ecuacion DiferencialDocumento104 páginasEcuacion DiferencialLinder Robledo100% (1)
- EscuderoPeraltaKateMonserrat P6Documento4 páginasEscuderoPeraltaKateMonserrat P6Kate PeraltaAún no hay calificaciones
- Guía de Aprendizaje 07 - Varias VariablesDocumento7 páginasGuía de Aprendizaje 07 - Varias VariablesTeresa Sanchez VillanuevaAún no hay calificaciones
- Distribución y Probabilidades (Trabajo)Documento7 páginasDistribución y Probabilidades (Trabajo)Yeny Cueva RodríguezAún no hay calificaciones
- Semana X EDDocumento8 páginasSemana X EDRaul AmaruAún no hay calificaciones
- Mtse U2 A2 JomeDocumento8 páginasMtse U2 A2 Jomejuan mezaAún no hay calificaciones
- Capítulo 7 Ecuaciones Diferenciales Lineales de Orden Superior de Coeficientes Variables (E.D.L. de O.S. de C.V.)Documento17 páginasCapítulo 7 Ecuaciones Diferenciales Lineales de Orden Superior de Coeficientes Variables (E.D.L. de O.S. de C.V.)jesusteamajuan3Aún no hay calificaciones
- Semana 9Documento35 páginasSemana 9Renzo Callan LunaAún no hay calificaciones
- Aleta ParabolicaDocumento9 páginasAleta ParabolicaNatalia Moreno MorenoAún no hay calificaciones
- ECUACIONES DIFERENCIALES Solucionario Evaluación Consolidado 1Documento3 páginasECUACIONES DIFERENCIALES Solucionario Evaluación Consolidado 1DANY BUITRON VILCAPOMAAún no hay calificaciones
- 04 - Clase 30 - Integración de Funciones CompuestasDocumento12 páginas04 - Clase 30 - Integración de Funciones CompuestasHuber PAún no hay calificaciones
- Balotario (1) .Documento11 páginasBalotario (1) .SANDRO XAVIER CCAMA SARAAún no hay calificaciones
- Balotario (1) .Documento11 páginasBalotario (1) .SANDRO XAVIER CCAMA SARAAún no hay calificaciones
- Mate 3 Practida Dirigida Final PDFDocumento19 páginasMate 3 Practida Dirigida Final PDFMartin AlonsoAún no hay calificaciones
- Teoría Integrales TrigonométricasDocumento6 páginasTeoría Integrales Trigonométricasmahycol HuamanñahuiAún no hay calificaciones
- Problema Resuelto Transformada de LaplaceDocumento3 páginasProblema Resuelto Transformada de LaplaceItalo Manuel Beltran HerviasAún no hay calificaciones
- Metodos de Resolución-Forma DiferencialDocumento10 páginasMetodos de Resolución-Forma Diferencialjuan ramosAún no hay calificaciones
- SISTEMAS DE EDO LINEALES - (Ejercicios Resueltos)Documento6 páginasSISTEMAS DE EDO LINEALES - (Ejercicios Resueltos)eerAún no hay calificaciones
- Problemas de Variable ComplejaDocumento14 páginasProblemas de Variable ComplejasamuelvzzAún no hay calificaciones
- 06 22 Integral DefinidaDocumento5 páginas06 22 Integral DefinidaSebastianAún no hay calificaciones
- Teoría Integrales DoblesDocumento10 páginasTeoría Integrales DoblesABRAHAM ERNESTO CHARCA COLCAAún no hay calificaciones
- Integrales Triples 3 1Documento28 páginasIntegrales Triples 3 1Jorge PSAún no hay calificaciones
- Integrales Triples 3Documento17 páginasIntegrales Triples 3Jorge PSAún no hay calificaciones
- Integrales Dobles PDFDocumento13 páginasIntegrales Dobles PDFSabrina PassacquaAún no hay calificaciones
- Señales y SistemasDocumento4 páginasSeñales y Sistemasnivia12Aún no hay calificaciones
- Tarea3-Ecuaciones Dieferenciales-Erika RomeroDocumento18 páginasTarea3-Ecuaciones Dieferenciales-Erika Romerosolanyi romeroAún no hay calificaciones
- Problemas Resueltos Sem 1 y 2 2020-1A PDFDocumento6 páginasProblemas Resueltos Sem 1 y 2 2020-1A PDFRafael TrujilloAún no hay calificaciones
- Problemas Resueltos Sem 1 y 2 2020-1ADocumento6 páginasProblemas Resueltos Sem 1 y 2 2020-1ARafael TrujilloAún no hay calificaciones
- Problemas Resueltos Sem 1 y 2 2020-1A PDFDocumento6 páginasProblemas Resueltos Sem 1 y 2 2020-1A PDFRafael TrujilloAún no hay calificaciones
- Ejercicio 59Documento1 páginaEjercicio 59Bryan CastroAún no hay calificaciones
- Videos de Interes Clase 1 S15Documento2 páginasVideos de Interes Clase 1 S15Bryan CastroAún no hay calificaciones
- Que Es UNIXDocumento2 páginasQue Es UNIXBryan CastroAún no hay calificaciones
- Primera IntervenciónDocumento2 páginasPrimera IntervenciónBryan CastroAún no hay calificaciones
- Clase Uno S15Documento13 páginasClase Uno S15Bryan CastroAún no hay calificaciones
- Cuestionario Previo A La Implementación de Un Servidor MultifunciónDocumento3 páginasCuestionario Previo A La Implementación de Un Servidor MultifunciónBryan CastroAún no hay calificaciones
- Ejercicio 61Documento1 páginaEjercicio 61Bryan CastroAún no hay calificaciones
- Actividad de Aprendizaje S14Documento3 páginasActividad de Aprendizaje S14Bryan CastroAún no hay calificaciones
- Lenguaje NaturalDocumento17 páginasLenguaje NaturalCharles ZambranoAún no hay calificaciones
- Actividad de Aprendizaje S16Documento2 páginasActividad de Aprendizaje S16Bryan CastroAún no hay calificaciones
- Contenido Clase Dos S16Documento18 páginasContenido Clase Dos S16Bryan CastroAún no hay calificaciones
- Lenguaje NaturalDocumento17 páginasLenguaje NaturalCharles ZambranoAún no hay calificaciones
- SilabusDocumento4 páginasSilabusBryan CastroAún no hay calificaciones
- Comparaciones de Cadenas AlfanumericasDocumento5 páginasComparaciones de Cadenas AlfanumericasJennifer Leticia Leyton SeguelAún no hay calificaciones
- Preguntas Seguridad de Los Sistemas OperativosDocumento11 páginasPreguntas Seguridad de Los Sistemas OperativosBryan CastroAún no hay calificaciones
- Importancia de La LecturaDocumento13 páginasImportancia de La LecturaBryan CastroAún no hay calificaciones
- SilabusDocumento4 páginasSilabusBryan CastroAún no hay calificaciones
- La CienciaDocumento4 páginasLa CienciaJavi Javier100% (1)
- ConsultaDocumento2 páginasConsultaBryan CastroAún no hay calificaciones
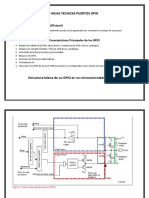
- Hojas Tecnicas Puertos GpioDocumento12 páginasHojas Tecnicas Puertos GpioBryan CastroAún no hay calificaciones
- Fuente de VoltajeDocumento10 páginasFuente de VoltajeBryan CastroAún no hay calificaciones
- El Amplificador OperacionalDocumento3 páginasEl Amplificador OperacionalBryan CastroAún no hay calificaciones
- Las Ecuaciones de Riccati Son Un Tipo Especial de Las Ecuaciones de BernoulliDocumento1 páginaLas Ecuaciones de Riccati Son Un Tipo Especial de Las Ecuaciones de BernoulliBryan CastroAún no hay calificaciones
- Artículo EMU 8086Documento3 páginasArtículo EMU 8086Bryan CastroAún no hay calificaciones
- ArquitecturaDocumento2 páginasArquitecturaBryan CastroAún no hay calificaciones
- Trabajo de Investigacion 1 PDFDocumento1 páginaTrabajo de Investigacion 1 PDFBryan CastroAún no hay calificaciones
- Articulo NoderedDocumento3 páginasArticulo NoderedBryan CastroAún no hay calificaciones
- ArtículoDocumento6 páginasArtículoBryan CastroAún no hay calificaciones
- Taller Eje 4Documento9 páginasTaller Eje 4Julian Alberto Prado SanchezAún no hay calificaciones
- 7458-Ensayo Ex - Ca-Tedra #2 Matemática 2016 PDFDocumento28 páginas7458-Ensayo Ex - Ca-Tedra #2 Matemática 2016 PDFBarbara GilesAún no hay calificaciones
- Parte 2 PolinomiosDocumento4 páginasParte 2 PolinomiosluceilenAún no hay calificaciones
- Como Escribir Informes FisicaDocumento4 páginasComo Escribir Informes FisicaFabricio MedinaAún no hay calificaciones
- Cuaderno Mate I 2023 s1Documento157 páginasCuaderno Mate I 2023 s1Oscar AlejandroAún no hay calificaciones
- Sistema de Numeración en Base 3Documento4 páginasSistema de Numeración en Base 3Abraham GarciaAún no hay calificaciones
- Tema 5. Comparación de Dos PoblacionesDocumento19 páginasTema 5. Comparación de Dos PoblacionesMarBella CosmeticsAún no hay calificaciones
- Matlab Int S1Documento26 páginasMatlab Int S1ronaldoAún no hay calificaciones
- Tarea CircunferenciaDocumento4 páginasTarea Circunferenciaania EspinozaAún no hay calificaciones
- LA RETÓRICA DE LA CIENCIA - Robert FluddDocumento21 páginasLA RETÓRICA DE LA CIENCIA - Robert FluddFelipe Aguirre100% (1)
- Taller de Refuerzo Noveno Segundo Periodo PDFDocumento1 páginaTaller de Refuerzo Noveno Segundo Periodo PDFSantiago MAún no hay calificaciones
- Material Complementario Números y Operaciones.Documento3 páginasMaterial Complementario Números y Operaciones.Yeny Arteaga DíazAún no hay calificaciones
- Problema 2Documento3 páginasProblema 2Ramses Uriel Torres CanoAún no hay calificaciones
- Institucion Educativa Marco Fidel Suarez de El ZuliaDocumento8 páginasInstitucion Educativa Marco Fidel Suarez de El ZuliaMultiservicios E&EAún no hay calificaciones
- Eje. Razones ProporcionesDocumento54 páginasEje. Razones ProporcionesAndres Sebastian Vasco AguileraAún no hay calificaciones
- COMPLEMENTO ARITMÉTICA Actividad 1.1-6Documento11 páginasCOMPLEMENTO ARITMÉTICA Actividad 1.1-6aftecpa_normalixc100% (1)
- Notacion Sigma IIDocumento22 páginasNotacion Sigma IIMaria BustamanteAún no hay calificaciones
- Estadistica Ev2Documento49 páginasEstadistica Ev2Jefferson LutualaAún no hay calificaciones
- Arquimedes Vuelve A La VidaDocumento9 páginasArquimedes Vuelve A La VidaLuis AlcaudónAún no hay calificaciones
- Formulario FisicaII Eulogio JeanDocumento32 páginasFormulario FisicaII Eulogio JeanJean Carlos Eulogio TrinidadAún no hay calificaciones
- (5to Año) FìsiaDocumento8 páginas(5to Año) FìsiaFabian SaffontAún no hay calificaciones
- Métodos de La Clase Math de JavaDocumento2 páginasMétodos de La Clase Math de JavaYorman OlguinAún no hay calificaciones
- Tarea 1 - Mateo SogamosoDocumento26 páginasTarea 1 - Mateo SogamosoMateo SogaAún no hay calificaciones
- Test de Fisica Sobre VectoresDocumento3 páginasTest de Fisica Sobre VectoresAngélica María Vargas OrozcoAún no hay calificaciones
- Texto de Aprendizaje 3ro Secundaria 2024 253 386Documento134 páginasTexto de Aprendizaje 3ro Secundaria 2024 253 386FLASH PRINTAún no hay calificaciones
- 01 SolucionarioDocumento45 páginas01 SolucionarioMonica MartinezAún no hay calificaciones
- Acotado en AutoCADDocumento18 páginasAcotado en AutoCADCarlos NavarroAún no hay calificaciones
- Pres Robotics Summer School 111214Documento43 páginasPres Robotics Summer School 111214Jose Neira CastilloAún no hay calificaciones
- Aplicación de La Integral en La Administración e IngenieríaDocumento31 páginasAplicación de La Integral en La Administración e IngenieríaSarita PortilloAún no hay calificaciones
- Lista 4 MDDocumento2 páginasLista 4 MDErwin Rodríguez MolinaAún no hay calificaciones
- Los mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosDe EverandLos mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosCalificación: 5 de 5 estrellas5/5 (2)
- La Biblia de las Matemáticas RápidasDe EverandLa Biblia de las Matemáticas RápidasCalificación: 4.5 de 5 estrellas4.5/5 (19)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDe EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraCalificación: 4.5 de 5 estrellas4.5/5 (5)
- El cerebro matemático: Cómo nacen, viven y a veces mueren los números en nuestra menteDe EverandEl cerebro matemático: Cómo nacen, viven y a veces mueren los números en nuestra menteCalificación: 4 de 5 estrellas4/5 (5)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- Mi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaDe EverandMi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaCalificación: 5 de 5 estrellas5/5 (5)
- Fundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosDe EverandFundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosAún no hay calificaciones
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleDe EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleCalificación: 5 de 5 estrellas5/5 (3)
- Guía práctica para la refracción ocularDe EverandGuía práctica para la refracción ocularCalificación: 5 de 5 estrellas5/5 (2)
- Matemáticas financieras y evaluación de proyectos: Segunda ediciónDe EverandMatemáticas financieras y evaluación de proyectos: Segunda ediciónAún no hay calificaciones
- La magia de los números: 136 recreaciones aritméticas y geométricasDe EverandLa magia de los números: 136 recreaciones aritméticas y geométricasCalificación: 1 de 5 estrellas1/5 (1)
- Matemáticas financierasDe EverandMatemáticas financierasCalificación: 4 de 5 estrellas4/5 (7)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDe EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasCalificación: 5 de 5 estrellas5/5 (4)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Aritmética Básica Y Álgebra ElementalDe EverandAritmética Básica Y Álgebra ElementalCalificación: 4 de 5 estrellas4/5 (8)
- Sanación por Cristales - La guía definitiva para principiantes: Descubre el poder de los cristales curativos, piedras y minerales para la salud y la felicidadDe EverandSanación por Cristales - La guía definitiva para principiantes: Descubre el poder de los cristales curativos, piedras y minerales para la salud y la felicidadCalificación: 4.5 de 5 estrellas4.5/5 (14)
- La Teoría de Conjuntos y los Fundamentos de las MatemáticasDe EverandLa Teoría de Conjuntos y los Fundamentos de las MatemáticasCalificación: 5 de 5 estrellas5/5 (1)
- Estadística básica: Introducción a la estadística con RDe EverandEstadística básica: Introducción a la estadística con RCalificación: 5 de 5 estrellas5/5 (8)
- Cálculo integral: Técnicas de integraciónDe EverandCálculo integral: Técnicas de integraciónCalificación: 4 de 5 estrellas4/5 (8)
- Mecánica cuántica para principiantesDe EverandMecánica cuántica para principiantesCalificación: 3.5 de 5 estrellas3.5/5 (5)