También podría gustarte
- Desarrollo de Una PatinetaDocumento29 páginasDesarrollo de Una PatinetaBarbarie1900Aún no hay calificaciones
- Fichas Tecnicas Hicamex AleacionesDocumento10 páginasFichas Tecnicas Hicamex AleacionesJagger Morrison100% (1)
- REFRIGERACION DE MELON-excelDocumento3 páginasREFRIGERACION DE MELON-excelRichard JimenezAún no hay calificaciones
- Manual ElectroestimuladorDocumento44 páginasManual ElectroestimuladorDaniel FrugoneAún no hay calificaciones
- 3 Encendido Plantas AltronDocumento16 páginas3 Encendido Plantas AltronC CHINCHAYANAún no hay calificaciones
- Los Materiales Hidrofóbicos y Sus AplicacionesDocumento14 páginasLos Materiales Hidrofóbicos y Sus AplicacionesSamuel H. CaballeroAún no hay calificaciones
- Catalogo - Alren 2010 PDFDocumento28 páginasCatalogo - Alren 2010 PDFRoberto Nuñez MarcuñoAún no hay calificaciones
- Sika Guia Ferretera 2021Documento96 páginasSika Guia Ferretera 2021Alejandra LeconaAún no hay calificaciones
- Aislantes Termicos - Termoacusticos - Aislante Termico Exterior Con Poliestireno ExpDocumento3 páginasAislantes Termicos - Termoacusticos - Aislante Termico Exterior Con Poliestireno ExpkroomerAún no hay calificaciones
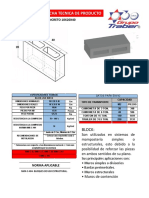
- Ficha Tecnica Block Hueco de Concreto 10X20X40 Linea Estructural NMX-C-404 PDFDocumento1 páginaFicha Tecnica Block Hueco de Concreto 10X20X40 Linea Estructural NMX-C-404 PDFJulio Angel M LopezAún no hay calificaciones
- Articulo UllmanDocumento10 páginasArticulo UllmanNicolás Martínez MejíaAún no hay calificaciones
- Aditivos para ConcretoDocumento11 páginasAditivos para ConcretoJuan Manuel Murillo ServinAún no hay calificaciones
- MUNDO RESIN Catálogo D19Documento36 páginasMUNDO RESIN Catálogo D19Benito Gonzalez IzquierdoAún no hay calificaciones
- Cronograma OferenteDocumento1 páginaCronograma OferenteDiego Diogenes Ortiz OrtizAún no hay calificaciones
- Online IiiDocumento25 páginasOnline IiiJonathan Luiz PolezaAún no hay calificaciones
- Proceso Típico de Purificación de AguaDocumento8 páginasProceso Típico de Purificación de AguaEduardo FranciscoAún no hay calificaciones
- Manual Bisual BasicDocumento53 páginasManual Bisual BasicMarco Antonio Enriquez AlonzoAún no hay calificaciones
- Inteligencia ArtificialDocumento68 páginasInteligencia ArtificialMarvin HarleyAún no hay calificaciones
- Energía Incorporada y Carbono en Materiales de ConstrucciónDocumento11 páginasEnergía Incorporada y Carbono en Materiales de ConstrucciónLiLiJin WookAún no hay calificaciones
- Manual MAX-DG89 PDFDocumento72 páginasManual MAX-DG89 PDFvictor montesAún no hay calificaciones
- Top Wall Humedad Extrema BlancoDocumento3 páginasTop Wall Humedad Extrema BlancoMartin Pérez CurielAún no hay calificaciones
- Matlab PDFDocumento24 páginasMatlab PDFFabio Andre Alanis VallejosAún no hay calificaciones
- TESIS Concreto Con CabelloDocumento19 páginasTESIS Concreto Con CabelloJoselito LCAún no hay calificaciones
- 147-L1T POL-espDocumento2 páginas147-L1T POL-espJavier BravoAún no hay calificaciones
- Catalogo Lubricantes TerpelDocumento30 páginasCatalogo Lubricantes TerpelEdgard AcostaAún no hay calificaciones
- Situacion Actual de La Ingenieria Mecatronica Aplicaciones en El Ambito Laboral InvestigacionDocumento20 páginasSituacion Actual de La Ingenieria Mecatronica Aplicaciones en El Ambito Laboral InvestigacionFrancisco Hernandez JuanAún no hay calificaciones
- Presentacion Mta y DecoDocumento23 páginasPresentacion Mta y DecoEduardo Alejandro Esquivel50% (2)
- TC-PR-TAC-01-V1 Termofijado de Tela en Máquina MersanDocumento9 páginasTC-PR-TAC-01-V1 Termofijado de Tela en Máquina Mersankatherine delgado100% (1)
- Enderezador TramaDocumento32 páginasEnderezador TramaAMERIKARAún no hay calificaciones
- Qué Es El ConcretoDocumento10 páginasQué Es El ConcretoVARGASSSSSSSSSSSSSSSAún no hay calificaciones
- Diseño Eléctrico y Electrónico de Una Motocicleta Eléctrica Infantil 2x2Documento5 páginasDiseño Eléctrico y Electrónico de Una Motocicleta Eléctrica Infantil 2x2Javier LMAún no hay calificaciones
- Mantenimiento Lógico de La LaptopDocumento14 páginasMantenimiento Lógico de La LaptopSaori SanchezAún no hay calificaciones
- EDIMCA Catalogo Madera-SolidaDocumento7 páginasEDIMCA Catalogo Madera-SolidaN. AndradeAún no hay calificaciones
- Curso SolidworksDocumento3 páginasCurso Solidworksoscar ivan rendonAún no hay calificaciones
- LadrillosDocumento5 páginasLadrillosRonald MedinaAún no hay calificaciones
- A01043 Industrial Enamel 43 Jun-18Documento4 páginasA01043 Industrial Enamel 43 Jun-18DiazAún no hay calificaciones
- Lyophilizer IntroductionDocumento16 páginasLyophilizer IntroductionOrlando Castro100% (1)
- Mitigacion de VibracionesDocumento3 páginasMitigacion de VibracionesCcortesOAún no hay calificaciones
- WEG Transformador Tipo Encapsulado Catalogo EspanolDocumento8 páginasWEG Transformador Tipo Encapsulado Catalogo Espanolexquisito3xAún no hay calificaciones
- Taller Programacion LinealDocumento16 páginasTaller Programacion LinealNacional de Obras VialesAún no hay calificaciones
- Manual de Operacion Linconl Ac 225Documento20 páginasManual de Operacion Linconl Ac 225mario serraAún no hay calificaciones
- Calculo de Eje Neutro de La Viga BPRDocumento7 páginasCalculo de Eje Neutro de La Viga BPRsamuel casillaAún no hay calificaciones
- Trabajo 1 Digi IIIDocumento32 páginasTrabajo 1 Digi IIIClaudia MuñozAún no hay calificaciones
- s4w Doc 02 01 Instal FR - Fr.esDocumento30 páginass4w Doc 02 01 Instal FR - Fr.esMiguel A. Glez.Aún no hay calificaciones
- Materiales CerámicosDocumento131 páginasMateriales CerámicosJoseAún no hay calificaciones
- Refrigerante para Corte y Mecanizado de Metales - MuturrolDocumento4 páginasRefrigerante para Corte y Mecanizado de Metales - Muturrolsmartcad60Aún no hay calificaciones
- EPDMDocumento57 páginasEPDMSolid works ArgentinaAún no hay calificaciones
- Hormigones BasfDocumento124 páginasHormigones Basflucas_martin_3Aún no hay calificaciones
- Curso MelaminaDocumento2 páginasCurso MelaminaVanny SanAún no hay calificaciones
- Impermeabilizante CAMPEÓN HQ 1307, Listo para Uso.Documento2 páginasImpermeabilizante CAMPEÓN HQ 1307, Listo para Uso.lobocerna50% (2)
- Sistema de Pesaje Electrónico para BovinosDocumento105 páginasSistema de Pesaje Electrónico para BovinosRony BenitezAún no hay calificaciones
- FiltrosDocumento48 páginasFiltrossondrak1234100% (1)
- 04 15955 Foll Web Muebleria Tapacantos Peru 01 Sep 15 2223Documento6 páginas04 15955 Foll Web Muebleria Tapacantos Peru 01 Sep 15 2223César Alarcón M CAún no hay calificaciones
- Aditivos para Cemento 1Documento2 páginasAditivos para Cemento 1Martin PiotrovskiAún no hay calificaciones
- Revista Asfaltica Vol 67 Julio Sept 2021 MexicoDocumento68 páginasRevista Asfaltica Vol 67 Julio Sept 2021 MexicoAlbert DenasAún no hay calificaciones
- Práctica No 7 - MCI (1925718)Documento5 páginasPráctica No 7 - MCI (1925718)JORGE GARZA100% (1)
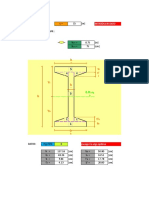
- Proyecto Bodega en Estructuras MetalicasDocumento37 páginasProyecto Bodega en Estructuras MetalicasRODRIGUEZ GUALTERO ALEX VANESSA100% (1)
- S8 - EIN - T3.1 AUTOMATISMOS Y APLICACIONES INDUSTRIALES v2020Documento32 páginasS8 - EIN - T3.1 AUTOMATISMOS Y APLICACIONES INDUSTRIALES v2020Victor HernandezAún no hay calificaciones
- Taller LEGO WeDo PDFDocumento33 páginasTaller LEGO WeDo PDFpablogerman2100% (1)
- Ejercicio Práctico 1.1Documento22 páginasEjercicio Práctico 1.1Juan Marcelo ArteagaAún no hay calificaciones
- 2DO SEMANA 14 EXPANSION EUROIPEA Rev PoloDocumento7 páginas2DO SEMANA 14 EXPANSION EUROIPEA Rev PoloCielo GallegosAún no hay calificaciones
- Cap 7Documento15 páginasCap 7Lucia AvilezAún no hay calificaciones
- Transmilenio PDFDocumento24 páginasTransmilenio PDFAngie TorresAún no hay calificaciones
- Nota Cornell Moises Quintero PDFDocumento2 páginasNota Cornell Moises Quintero PDFMoises QuinteroAún no hay calificaciones
- Tramite Contencioso AdministrativoDocumento179 páginasTramite Contencioso AdministrativoEdison CriolloAún no hay calificaciones
- Clasificación de Los Intercambiadores de CalorDocumento4 páginasClasificación de Los Intercambiadores de CalorGaby Símbala FeijooAún no hay calificaciones
- 2018 Tesis Sanchez Diaz Maria AlejandraDocumento154 páginas2018 Tesis Sanchez Diaz Maria AlejandrabrayanAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Unidad 3 - Tarea 4 - Debate en Skype y Resumen Del Debate en Power PointDocumento6 páginasGuía de Actividades y Rúbrica de Evaluación - Unidad 3 - Tarea 4 - Debate en Skype y Resumen Del Debate en Power PointEdwin Fernando Arenas TorradoAún no hay calificaciones
- Examenes Bimestrales Razonamiento Verbal 2do GradoDocumento2 páginasExamenes Bimestrales Razonamiento Verbal 2do GradoGustavo Carrera Becerra100% (1)
- L Bibliograf Medica Vol V PDFDocumento958 páginasL Bibliograf Medica Vol V PDFballestaspetroAún no hay calificaciones
- Brcgs Packaging Issue 6 Spanish Check ListDocumento77 páginasBrcgs Packaging Issue 6 Spanish Check ListJonathan Castelan100% (1)
- Tarea Escalonada N2 Analisis Estructural IDocumento26 páginasTarea Escalonada N2 Analisis Estructural ILisbeth GaribayAún no hay calificaciones
- RNP ServiciosDocumento4 páginasRNP ServiciosPablo AlemánAún no hay calificaciones
- Ejemplo Proyecto de Mejora Tarea 2Documento30 páginasEjemplo Proyecto de Mejora Tarea 2Jhonatan Ustua VegaAún no hay calificaciones
- Estructura Del Átomo y Enlaces Químicos GRUPO 2Documento12 páginasEstructura Del Átomo y Enlaces Químicos GRUPO 2Carlos BenitesAún no hay calificaciones
- Documento Sin TítuloDocumento5 páginasDocumento Sin TítuloJOSE ALEJANDRO SANTIAGO GUILLENAún no hay calificaciones
- Derivados de Acidos CarboxilicosDocumento6 páginasDerivados de Acidos CarboxilicossiriusdarkAún no hay calificaciones
- AndrologiaDocumento39 páginasAndrologiaYeny VillarAún no hay calificaciones
- Malla Emprendimiento 6 y 7Documento4 páginasMalla Emprendimiento 6 y 7OLIVIA HUERTASAún no hay calificaciones
- Castañeda López OmarDocumento2 páginasCastañeda López OmarJanet MaReAún no hay calificaciones
- Veinte Departamentos Afectados Por Noche Extremadamente Fría.Documento8 páginasVeinte Departamentos Afectados Por Noche Extremadamente Fría.NÚCLEO NOTICIASAún no hay calificaciones
- Club de LecturaDocumento7 páginasClub de LecturaAlfonso Jimenez CandelarioAún no hay calificaciones
- Marco Metodoligico ISIDRODocumento25 páginasMarco Metodoligico ISIDROIsidro ValdezAún no hay calificaciones
- XamafodapamejejaxujDocumento3 páginasXamafodapamejejaxujSimon Guerra LaraAún no hay calificaciones
- Horno TamborDocumento8 páginasHorno TamborLuciana RosesAún no hay calificaciones
- 02 Caracterización Básica GuavioDocumento20 páginas02 Caracterización Básica GuavioNestor NovoaAún no hay calificaciones
- Preguntas de Verificación y Análisis Del Caso 5-3Documento8 páginasPreguntas de Verificación y Análisis Del Caso 5-3Andrés CruzAún no hay calificaciones
- Reglamento de Trabajos Investigacion FMTDocumento35 páginasReglamento de Trabajos Investigacion FMTAaron VargasAún no hay calificaciones
- Curriculum Vitae Dr. Cesar Morales2019Documento3 páginasCurriculum Vitae Dr. Cesar Morales2019Cesar Eduardo Morales0% (1)
- Informe Numero de ReynoldsDocumento4 páginasInforme Numero de ReynoldsJesús GonzálezAún no hay calificaciones