También podría gustarte
- Cuerpo Rigido Estatica MaquetaDocumento53 páginasCuerpo Rigido Estatica MaquetaCRISTIAN TINEO MORALESAún no hay calificaciones
- Derivas de la complejidad fundamentos científicos y filosóficosDe EverandDerivas de la complejidad fundamentos científicos y filosóficosAún no hay calificaciones
- Mama LisaDocumento84 páginasMama LisaBenja CorAún no hay calificaciones
- B U A P: Enemérita Niversidad Utónoma de UeblaDocumento66 páginasB U A P: Enemérita Niversidad Utónoma de UeblaAlan YairAún no hay calificaciones
- La ecología del derecho: Hacia un sistema jurídico en armoníaDe EverandLa ecología del derecho: Hacia un sistema jurídico en armoníaAún no hay calificaciones
- TD 2471Documento287 páginasTD 2471Mercy FloresAún no hay calificaciones
- Trabajo Equilibrio ConclusionesDocumento28 páginasTrabajo Equilibrio Conclusionescuro0% (1)
- Bioética y derecho privado: Fragmentos de un diccionarioDe EverandBioética y derecho privado: Fragmentos de un diccionarioAún no hay calificaciones
- Portada e IndiceDocumento3 páginasPortada e IndiceAnonymous umlv4fAFLAún no hay calificaciones
- Mecanica de SolidosDocumento50 páginasMecanica de SolidosAlba Rosa EscobarAún no hay calificaciones
- Las situaciones administrativas en la función publicaDe EverandLas situaciones administrativas en la función publicaAún no hay calificaciones
- Determinación de Las Propiedades Mecánicas de Bambusa VulgarisDocumento92 páginasDeterminación de Las Propiedades Mecánicas de Bambusa Vulgarisgoku4gb100% (1)
- Lesiones Basicas de Biomecanica Del Aparato Locomotor PDFDocumento351 páginasLesiones Basicas de Biomecanica Del Aparato Locomotor PDFGabrielAún no hay calificaciones
- IngAntismica FCP07Documento71 páginasIngAntismica FCP07Brandon Moya RamosAún no hay calificaciones
- Introducción A La Química Del Carbono-Dra Irma Rumela Aguirre ZaquinaulaDocumento20 páginasIntroducción A La Química Del Carbono-Dra Irma Rumela Aguirre ZaquinaulaIrma AZAún no hay calificaciones
- Calimod - t030 - 71972516 - T Guzman Vara Katherine MercedesDocumento193 páginasCalimod - t030 - 71972516 - T Guzman Vara Katherine MercedesMICAEL OSWALDO SALAZAR LAZOAún no hay calificaciones
- Lineas Rectas InvestigacionDocumento204 páginasLineas Rectas InvestigacionikerAún no hay calificaciones
- Reporte #2-Circuitos en Corriente Alterna - Grupo 8 - 1Documento54 páginasReporte #2-Circuitos en Corriente Alterna - Grupo 8 - 1Jorge EspinosaAún no hay calificaciones
- 4 Sec - FÍSICADocumento64 páginas4 Sec - FÍSICAJuan ChavezAún no hay calificaciones
- Estudio de La Generación de Espectros Medios Condicionales Utilizando La Base de Datos de Sismos Con Magnitud deDocumento221 páginasEstudio de La Generación de Espectros Medios Condicionales Utilizando La Base de Datos de Sismos Con Magnitud defelipe espinozaAún no hay calificaciones
- Diseño Estructural de Zapatas Que Soportan Muros de Concreto y Mamposteria..Documento82 páginasDiseño Estructural de Zapatas Que Soportan Muros de Concreto y Mamposteria..Francisco Alvarez Pascual80% (5)
- Lecciones Basicas de Biomecanica Del Aparato LocomotorDocumento351 páginasLecciones Basicas de Biomecanica Del Aparato LocomotorMaria Jose Tapia PetitAún no hay calificaciones
- Prof. Edinson Guanchez. Ing. María Verónica Guevara Ing. Argenis RodríguezDocumento74 páginasProf. Edinson Guanchez. Ing. María Verónica Guevara Ing. Argenis Rodríguezkelly100% (2)
- 381c990a-e850-4dad-8f0e-ebdf35afdce3 (1)Documento173 páginas381c990a-e850-4dad-8f0e-ebdf35afdce3 (1)Araceli Morales Arce100% (1)
- Compendio de Medicina China - Eric.marieDocumento325 páginasCompendio de Medicina China - Eric.marieoscar olivaresAún no hay calificaciones
- Iparraguirre RojasDocumento70 páginasIparraguirre RojasAdaleydisBenavidesMAún no hay calificaciones
- Diseño Estructural de Una Columna de Destilacion Primaria en La Refineria Conchan, Segun Norma AsmeDocumento260 páginasDiseño Estructural de Una Columna de Destilacion Primaria en La Refineria Conchan, Segun Norma AsmeElferAún no hay calificaciones
- TesisUAEM-CV-Restringido-FRANCISCO JAVIER ROMERO ARREOLADocumento116 páginasTesisUAEM-CV-Restringido-FRANCISCO JAVIER ROMERO ARREOLASalvador Hernandez100% (1)
- Tesis Terminado Harina de MacaDocumento124 páginasTesis Terminado Harina de Macajuan manuel lopez zumaetaAún no hay calificaciones
- Libro Análisis Matricial de Estructuras en Calculadoras HPPrimeDocumento124 páginasLibro Análisis Matricial de Estructuras en Calculadoras HPPrimecarlos cabreraAún no hay calificaciones
- Lab FISICAIIIDocumento60 páginasLab FISICAIIIomar castilloAún no hay calificaciones
- Viladot Voegeli Antonio - Lesiones Basicas de Biomecanica Del Aparato Locomotor (Opt) PDFDocumento351 páginasViladot Voegeli Antonio - Lesiones Basicas de Biomecanica Del Aparato Locomotor (Opt) PDFAdriàn Guillermo Mantilla Roa83% (69)
- Millan Arancibia James RichardDocumento144 páginasMillan Arancibia James Richardpf2019063497Aún no hay calificaciones
- Informe MetalurgiaDocumento76 páginasInforme MetalurgiaDanny Jesus Lindo RojasAún no hay calificaciones
- TTS CiriaRuggieroJavierMarceloDocumento61 páginasTTS CiriaRuggieroJavierMarceloEsthefany Karito AranaAún no hay calificaciones
- Qu+¡mica y Bioqu+¡mica de La Carne-AndujarDocumento126 páginasQu+¡mica y Bioqu+¡mica de La Carne-AndujarAndres F Celis BAún no hay calificaciones
- Fisica2 Robinzon Vasquez PDFDocumento172 páginasFisica2 Robinzon Vasquez PDFespectanteAún no hay calificaciones
- Separata EstáticaDocumento43 páginasSeparata EstáticaNaomy Cancha GranadosAún no hay calificaciones
- Pdot Gadm Arosemena TolaDocumento653 páginasPdot Gadm Arosemena TolaVanne CarvajalAún no hay calificaciones
- Libro - La MateriaDocumento244 páginasLibro - La MateriaNayely Gayosso100% (6)
- Manual Unidad 1 Mecánica Vectorial para IngenierosDocumento68 páginasManual Unidad 1 Mecánica Vectorial para IngenierosJuan colca pomaAún no hay calificaciones
- Universidad Mayor de San Andrés Facultad de Agronomía Carrera de Ingeniería AgronómicaDocumento133 páginasUniversidad Mayor de San Andrés Facultad de Agronomía Carrera de Ingeniería AgronómicaJorge Luis Apaza GutierrezAún no hay calificaciones
- FatigaDocumento121 páginasFatigaElkin Humberto Villalobos GomezAún no hay calificaciones
- Cuadernillo de Física II PDFDocumento175 páginasCuadernillo de Física II PDFANDREAAún no hay calificaciones
- RojasMurrietaCarmenUV PDFDocumento93 páginasRojasMurrietaCarmenUV PDFAnonymous sfzWykDAún no hay calificaciones
- CIC - Caracterizacion Funcional Molecula Proapoptotica PDFDocumento170 páginasCIC - Caracterizacion Funcional Molecula Proapoptotica PDFTabatha Velarde ValenciaAún no hay calificaciones
- Tesis Doctorado Aprobado Por Concejo Facultad Abr 2016 PDFDocumento248 páginasTesis Doctorado Aprobado Por Concejo Facultad Abr 2016 PDFmanuelcollaschavezAún no hay calificaciones
- Proyecto Final Jose Flores PetroleraDocumento117 páginasProyecto Final Jose Flores PetroleraThay VaniaAún no hay calificaciones
- J Rodriguez C - CONGELACIÓN DE LA MARCHA EN PACIENTES INSTITUCIONALIZADOS Y DIAGNOSTICADOS DE ENFERMEDAD DE PARKINSONDocumento112 páginasJ Rodriguez C - CONGELACIÓN DE LA MARCHA EN PACIENTES INSTITUCIONALIZADOS Y DIAGNOSTICADOS DE ENFERMEDAD DE PARKINSONbenjabmbAún no hay calificaciones
- Biblia MecánicaDocumento68 páginasBiblia MecánicaAngie Jiménez IñiguezAún no hay calificaciones
- Terapia Informativa Manual Grigori Grabovoi CompressDocumento139 páginasTerapia Informativa Manual Grigori Grabovoi CompresscvasesoriamarketingAún no hay calificaciones
- Coca Erquinio José AlejandroDocumento157 páginasCoca Erquinio José AlejandroJOSE LUIS LEON GUTIERREZAún no hay calificaciones
- 01 - Aplicación de La Metodología de Evaluación Sísmica en Ene - Asce-Sei 31-03Documento163 páginas01 - Aplicación de La Metodología de Evaluación Sísmica en Ene - Asce-Sei 31-03Alexandre Muller100% (1)
- DISKINESIAsDocumento107 páginasDISKINESIAsMilagrosAún no hay calificaciones
- Ciclo D e Vida de La MermeladaDocumento5 páginasCiclo D e Vida de La Mermeladampey171Aún no hay calificaciones
- Tesis Evaluación Ergonómica 02-02-2014 PDFDocumento210 páginasTesis Evaluación Ergonómica 02-02-2014 PDFHugo Alejandro Cazco CevallosAún no hay calificaciones
- Analisis Estadisticos de Las Estaciones Metereologicas Precipitacion de La Oroya, Morropon y BellavistaDocumento7 páginasAnalisis Estadisticos de Las Estaciones Metereologicas Precipitacion de La Oroya, Morropon y BellavistaCRISTIAN TINEO MORALESAún no hay calificaciones
- Practica - 03 CALCULO DE LA EVAPORACION Y EVAPOTRANSPIRACIONDocumento11 páginasPractica - 03 CALCULO DE LA EVAPORACION Y EVAPOTRANSPIRACIONCRISTIAN TINEO MORALESAún no hay calificaciones
- Practica, 03 YesvenDocumento15 páginasPractica, 03 YesvenCRISTIAN TINEO MORALESAún no hay calificaciones
- Practica, 03 YesvenDocumento15 páginasPractica, 03 YesvenCRISTIAN TINEO MORALESAún no hay calificaciones
- Calculo-Poblacional 4 METODOSDocumento6 páginasCalculo-Poblacional 4 METODOSCRISTIAN TINEO MORALESAún no hay calificaciones
- Informe Hidrologia 1 DELIMITACION DE UNA CUENCADocumento7 páginasInforme Hidrologia 1 DELIMITACION DE UNA CUENCACRISTIAN TINEO MORALESAún no hay calificaciones
- 3 Estaciones ANALISIS ESTADISTICOS DE HISTOGRAMA Y DIAGRAMA DE CAJASDocumento28 páginas3 Estaciones ANALISIS ESTADISTICOS DE HISTOGRAMA Y DIAGRAMA DE CAJASCRISTIAN TINEO MORALESAún no hay calificaciones
- INFORME SANITARIA AFORO - Metodo FlotadorDocumento25 páginasINFORME SANITARIA AFORO - Metodo FlotadorCRISTIAN TINEO MORALESAún no hay calificaciones
- Informe de Electrificacion Rural 1Documento19 páginasInforme de Electrificacion Rural 1CRISTIAN TINEO MORALESAún no hay calificaciones
- Informe 6Documento9 páginasInforme 6CRISTIAN TINEO MORALESAún no hay calificaciones
- Informe 02 Central H DE SanfranciscoDocumento6 páginasInforme 02 Central H DE SanfranciscoCRISTIAN TINEO MORALESAún no hay calificaciones
- Informe 6Documento11 páginasInforme 6CRISTIAN TINEO MORALESAún no hay calificaciones
- Yucra Arango Herbert Practica 02 Fisica de Suelos Ag-241Documento8 páginasYucra Arango Herbert Practica 02 Fisica de Suelos Ag-241CRISTIAN TINEO MORALESAún no hay calificaciones
- Planos Estructurales de Concreto ArmadoDocumento20 páginasPlanos Estructurales de Concreto ArmadoGlicerio AL100% (1)
- Practica 01 de Mecanica de Fluidos, Densidad y Viscocidad de Los FluidosDocumento24 páginasPractica 01 de Mecanica de Fluidos, Densidad y Viscocidad de Los FluidosCRISTIAN TINEO MORALESAún no hay calificaciones
- Diseño Geometrico de Carretera Trocha CarrozableDocumento14 páginasDiseño Geometrico de Carretera Trocha CarrozableCRISTIAN TINEO MORALESAún no hay calificaciones
- Entrega Final TS Cacao para Fines de Ganaderia y AgriculturaDocumento44 páginasEntrega Final TS Cacao para Fines de Ganaderia y AgriculturaCRISTIAN TINEO MORALESAún no hay calificaciones
- Trabajo Semestral Distribucion de Frecuencias de Una MuestraDocumento30 páginasTrabajo Semestral Distribucion de Frecuencias de Una MuestraCRISTIAN TINEO MORALESAún no hay calificaciones
- Practica 1 Agrotecnia AplicadaDocumento9 páginasPractica 1 Agrotecnia AplicadaCRISTIAN TINEO MORALESAún no hay calificaciones
- TRABAJO SEMESTRAL FINAL FloculacionDocumento40 páginasTRABAJO SEMESTRAL FINAL FloculacionCRISTIAN TINEO MORALESAún no hay calificaciones
- Practica #01 - 2022Documento5 páginasPractica #01 - 2022CRISTIAN TINEO MORALESAún no hay calificaciones
- Energia Especifica en Canales AbiertosDocumento48 páginasEnergia Especifica en Canales AbiertosCRISTIAN TINEO MORALESAún no hay calificaciones
- Energía Especifica en Canales AbiertosDocumento5 páginasEnergía Especifica en Canales AbiertosJavier Lopez Madrid50% (2)
- Equilibrio de Cuerpo RigidoDocumento23 páginasEquilibrio de Cuerpo RigidoCRISTIAN TINEO MORALESAún no hay calificaciones
- MCVV2 U1 A2 AnhmDocumento26 páginasMCVV2 U1 A2 AnhmYair ParkerAún no hay calificaciones
- 001.calculo ExposicionDocumento10 páginas001.calculo Exposicionbryan guiza ojedaAún no hay calificaciones
- Soluciones Ejercicios Unidad 1 (Conicas Calculo IV)Documento8 páginasSoluciones Ejercicios Unidad 1 (Conicas Calculo IV)Anyx Cornielz RoarAún no hay calificaciones
- Informe de Lab de Fisica Dinamica de RotacionDocumento15 páginasInforme de Lab de Fisica Dinamica de RotacionJulio SamaniegoAún no hay calificaciones
- A Segunda Unidad (Derivadas)Documento42 páginasA Segunda Unidad (Derivadas)Ávila Peralta Vicente SaúlAún no hay calificaciones
- 14 - 15 Variación y Derivada Como LímiteDocumento21 páginas14 - 15 Variación y Derivada Como LímiteValeria GomezAún no hay calificaciones
- (M1-E1) Evaluación (Prueba) - R.19 - FÍSICA IDocumento18 páginas(M1-E1) Evaluación (Prueba) - R.19 - FÍSICA Idaniel monsalvesAún no hay calificaciones
- Medicion y VectoresDocumento51 páginasMedicion y VectoresVilma MVAún no hay calificaciones
- Capitulo 2Documento36 páginasCapitulo 2bmadridAún no hay calificaciones
- Guía 2 Matemáticas Decimo IiipDocumento10 páginasGuía 2 Matemáticas Decimo IiipAleja PedrozaAún no hay calificaciones
- Tema 3 NDocumento53 páginasTema 3 NLuis E. Neira RoperoAún no hay calificaciones
- Colisión en Dos Dimensiones InformeDocumento7 páginasColisión en Dos Dimensiones InformePEÑA MORALES PATRICK ALEJANDROAún no hay calificaciones
- Sistema Generador y Base de Un Espacio Vectorial en DetalleDocumento10 páginasSistema Generador y Base de Un Espacio Vectorial en DetalleAle BellettiAún no hay calificaciones
- PARCIAL FISICA II - Christian David Muñoz Rodriguez 20201025154Documento25 páginasPARCIAL FISICA II - Christian David Muñoz Rodriguez 20201025154Christian MuñozAún no hay calificaciones
- HipérbolaDocumento8 páginasHipérboladj atomixxAún no hay calificaciones
- Planeación Matematica y Vida Cotidiana II 2016-ADocumento8 páginasPlaneación Matematica y Vida Cotidiana II 2016-AFiliberto Ramos MaravillaAún no hay calificaciones
- Tarea 13Documento2 páginasTarea 13Jenifer FuentesAún no hay calificaciones
- Clasificación de Los Ángulos para Primer Grado de SecundariaDocumento3 páginasClasificación de Los Ángulos para Primer Grado de SecundariaandersonAún no hay calificaciones
- Adaptaciones Curriculares MatematicasDocumento32 páginasAdaptaciones Curriculares Matematicasfgmoscoso8523Aún no hay calificaciones
- s12 La ElipseDocumento2 páginass12 La ElipseRH WilmerAún no hay calificaciones
- TP3 Fines Trigonometría Del TriánguloDocumento3 páginasTP3 Fines Trigonometría Del TriánguloAlan VasquezAún no hay calificaciones
- Recuperatorio 1er ParcialDocumento1 páginaRecuperatorio 1er ParcialestebanAún no hay calificaciones
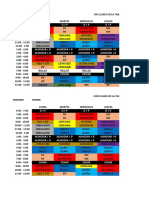
- Horario - SkerreDocumento9 páginasHorario - SkerreChristian Anthony Castro EugenioAún no hay calificaciones
- Diferenciabilidad y Derivada DireccionDocumento2 páginasDiferenciabilidad y Derivada DireccionMiguelMoretónAún no hay calificaciones
- Probabilidad y Estadistica 3Documento8 páginasProbabilidad y Estadistica 3Arely HerreraAún no hay calificaciones
- RESUMENDocumento15 páginasRESUMENCiara DgAún no hay calificaciones
- Voli IniciacionDocumento33 páginasVoli Iniciacionelnino9994385Aún no hay calificaciones
- Diseño Industrial: para Configurar Artefactos enDocumento260 páginasDiseño Industrial: para Configurar Artefactos enMarAún no hay calificaciones
- Topografía Aplicada Ingeniería Civil II 2017-2Documento6 páginasTopografía Aplicada Ingeniería Civil II 2017-2Antonio López SaldivarAún no hay calificaciones
- 09 Semana 09Documento48 páginas09 Semana 09Leeo VGAún no hay calificaciones
- Guía práctica para la refracción ocularDe EverandGuía práctica para la refracción ocularCalificación: 5 de 5 estrellas5/5 (2)
- Neurocuántica: La nueva frontera de la neurocienciaDe EverandNeurocuántica: La nueva frontera de la neurocienciaCalificación: 5 de 5 estrellas5/5 (1)
- La magia de los números: 136 recreaciones aritméticas y geométricasDe EverandLa magia de los números: 136 recreaciones aritméticas y geométricasCalificación: 1 de 5 estrellas1/5 (1)
- Fundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosDe EverandFundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosAún no hay calificaciones
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleDe EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleCalificación: 5 de 5 estrellas5/5 (3)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Los gatos sueñan con física cuántica y los perros con universos paralelos: Mecánica cuántica para todas las edadesDe EverandLos gatos sueñan con física cuántica y los perros con universos paralelos: Mecánica cuántica para todas las edadesCalificación: 4.5 de 5 estrellas4.5/5 (18)
- Mil ejercicios de preparación física (2 Vol)De EverandMil ejercicios de preparación física (2 Vol)Calificación: 3 de 5 estrellas3/5 (5)
- Aritmética Básica Y Álgebra ElementalDe EverandAritmética Básica Y Álgebra ElementalCalificación: 4 de 5 estrellas4/5 (8)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDe EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasCalificación: 5 de 5 estrellas5/5 (4)
- UF1213 - Técnicas de mecanizado y metrologíaDe EverandUF1213 - Técnicas de mecanizado y metrologíaCalificación: 4 de 5 estrellas4/5 (5)
- Sanación por Cristales - La guía definitiva para principiantes: Descubre el poder de los cristales curativos, piedras y minerales para la salud y la felicidadDe EverandSanación por Cristales - La guía definitiva para principiantes: Descubre el poder de los cristales curativos, piedras y minerales para la salud y la felicidadCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Proyectos de instalaciones eléctrica de baja tensiónDe EverandProyectos de instalaciones eléctrica de baja tensiónCalificación: 5 de 5 estrellas5/5 (1)
- La sanacion anticipada. El uso de la energía a través de la intenciónDe EverandLa sanacion anticipada. El uso de la energía a través de la intenciónCalificación: 4 de 5 estrellas4/5 (13)
- Física mecánica: Nivelación para estudiantes universitariosDe EverandFísica mecánica: Nivelación para estudiantes universitariosCalificación: 4 de 5 estrellas4/5 (7)
- Flujo de fluidos e intercambio de calorDe EverandFlujo de fluidos e intercambio de calorCalificación: 1 de 5 estrellas1/5 (1)
- Introducción a la relatividad general: Un curso para estudiantes de físicaDe EverandIntroducción a la relatividad general: Un curso para estudiantes de físicaCalificación: 3.5 de 5 estrellas3.5/5 (2)