También podría gustarte
- Informefinalexp 2Documento8 páginasInformefinalexp 2Gabriela MoralesAún no hay calificaciones
- INFORMEFINALEXP3Documento6 páginasINFORMEFINALEXP3Gabriela MoralesAún no hay calificaciones
- INFORMEFINALEXP3Documento7 páginasINFORMEFINALEXP3Gabriela MoralesAún no hay calificaciones
- Informefinalexp 2Documento8 páginasInformefinalexp 2Gabriela MoralesAún no hay calificaciones
- In For Me Final Experiencia 1Documento6 páginasIn For Me Final Experiencia 1Gabriela MoralesAún no hay calificaciones
- INFORMEFINALDIGITAKESDocumento11 páginasINFORMEFINALDIGITAKESGabriela MoralesAún no hay calificaciones
- Universidad Nacional de San Antonio Abad Del Cusco: Escuela Profesional de Ingeniería ElectrónicaDocumento20 páginasUniversidad Nacional de San Antonio Abad Del Cusco: Escuela Profesional de Ingeniería ElectrónicaGabriela MoralesAún no hay calificaciones
- Informe Previo 1 InstrumentacionDocumento5 páginasInforme Previo 1 InstrumentacionGabriela MoralesAún no hay calificaciones
- PROCEDIMIENTODocumento3 páginasPROCEDIMIENTOGabriela MoralesAún no hay calificaciones
- LOGICADIFUSAIDocumento1 páginaLOGICADIFUSAIGabriela MoralesAún no hay calificaciones
- Informe Previo 5Documento14 páginasInforme Previo 5Gabriela MoralesAún no hay calificaciones
- Informe Previo 6Documento15 páginasInforme Previo 6Gabriela MoralesAún no hay calificaciones
- EXP2INFORMEPREVIODocumento6 páginasEXP2INFORMEPREVIOGabriela MoralesAún no hay calificaciones
- Laboratorio Final 1 de InstrumentacionDocumento2 páginasLaboratorio Final 1 de InstrumentacionGabriela MoralesAún no hay calificaciones
- Informe Previo 3 InstrumentaciónDocumento5 páginasInforme Previo 3 InstrumentaciónGabriela MoralesAún no hay calificaciones
- EXP4PIDDocumento7 páginasEXP4PIDGabriela MoralesAún no hay calificaciones
- Informe Finalexp5Documento8 páginasInforme Finalexp5Gabriela MoralesAún no hay calificaciones
- EXP4PIDDocumento7 páginasEXP4PIDGabriela MoralesAún no hay calificaciones
- InformepreviocontrolDocumento6 páginasInformepreviocontrolGabriela MoralesAún no hay calificaciones
- EXPERCIAPREVIA5Documento8 páginasEXPERCIAPREVIA5Gabriela MoralesAún no hay calificaciones
- EXPERCIAPREVIA5Documento8 páginasEXPERCIAPREVIA5Gabriela MoralesAún no hay calificaciones
- Exo 5 PrevioDocumento10 páginasExo 5 PrevioGabriela MoralesAún no hay calificaciones
- Informe Primer Parcial Laboratorio TelecomunicacionesDocumento16 páginasInforme Primer Parcial Laboratorio TelecomunicacionesGabriela MoralesAún no hay calificaciones
- Telecomunicaciones GuionDocumento3 páginasTelecomunicaciones GuionGabriela MoralesAún no hay calificaciones
- Informe Primer Parcial Laboratorio TelecomunicacionesDocumento16 páginasInforme Primer Parcial Laboratorio TelecomunicacionesGabriela MoralesAún no hay calificaciones
- INFORMEFINALTELECIDocumento15 páginasINFORMEFINALTELECIGabriela MoralesAún no hay calificaciones
- Parte 2 Morales Soto GabrielaDocumento2 páginasParte 2 Morales Soto GabrielaGabriela MoralesAún no hay calificaciones
- Modelo Matematico para El Sistema CardiovascularDocumento8 páginasModelo Matematico para El Sistema CardiovascularGabriela MoralesAún no hay calificaciones
- MOrales Soto GabrielatDocumento2 páginasMOrales Soto GabrielatGabriela MoralesAún no hay calificaciones
- Factura-Mi Telcel-2Documento4 páginasFactura-Mi Telcel-2Lenin De Jesus PradoAún no hay calificaciones
- Aporte Norma Cobit 5Documento4 páginasAporte Norma Cobit 5Diego Ortiz HernandezAún no hay calificaciones
- Foro 4 Satisfacción Del Cliente - Quejas PDFDocumento2 páginasForo 4 Satisfacción Del Cliente - Quejas PDFPahola VillcaAún no hay calificaciones
- Cribado de MineralesDocumento21 páginasCribado de Mineraleskevin alex gallegos mamaniAún no hay calificaciones
- El Diodo Led PracticasDocumento8 páginasEl Diodo Led Practicasangelica1225Aún no hay calificaciones
- Amplificadores Operacionales PDFDocumento43 páginasAmplificadores Operacionales PDFDanielAún no hay calificaciones
- Reporte PIADocumento4 páginasReporte PIAEdgarSebastianAguilarAún no hay calificaciones
- Control de DespachosDocumento15 páginasControl de DespachosDanny Daniel Domoromo MendozaAún no hay calificaciones
- Reporte de Liquidos PenetrantesDocumento3 páginasReporte de Liquidos PenetrantesClaudio Israel Godinez SomeraAún no hay calificaciones
- DISEÑO E IMPLEMENTACIÓN DE UNA RED DE Alta VelocidadDocumento25 páginasDISEÑO E IMPLEMENTACIÓN DE UNA RED DE Alta VelocidadThai MahjongAún no hay calificaciones
- Contenido Del Curso Operador en ComputadoraDocumento4 páginasContenido Del Curso Operador en ComputadoraJose Ernesto Bautista RodasAún no hay calificaciones
- Monitor CRTDocumento3 páginasMonitor CRTbelkysAún no hay calificaciones
- Trabajo 03 - IaDocumento7 páginasTrabajo 03 - IaDavid Scott ChambiAún no hay calificaciones
- FPR U1 Ea IsmgDocumento9 páginasFPR U1 Ea Ismgisaac1morales-1Aún no hay calificaciones
- LANDIS GYR ZCXe110-Manual de UsoDocumento49 páginasLANDIS GYR ZCXe110-Manual de UsoGusAún no hay calificaciones
- Secc B Gruponº02 Semana01 Analisis DocumentalDocumento33 páginasSecc B Gruponº02 Semana01 Analisis DocumentalEduardo Salazar GarciaAún no hay calificaciones
- Guia Basic A Fault Kin 2Documento7 páginasGuia Basic A Fault Kin 2Diego Tafur López100% (1)
- P1 Evolucion de Equipo de Microondas - 2017-I PDFDocumento14 páginasP1 Evolucion de Equipo de Microondas - 2017-I PDFCarlos AlvarezAún no hay calificaciones
- Silabo de Gestión de Sistemas InformáticosDocumento5 páginasSilabo de Gestión de Sistemas Informáticosroland_yossefAún no hay calificaciones
- Estudio Seguridad Sunat JR 28 de Julio 2016Documento26 páginasEstudio Seguridad Sunat JR 28 de Julio 2016Alqupa Rinrin AllquparinrinAún no hay calificaciones
- Investigacion Seguridad de La InformaciónDocumento23 páginasInvestigacion Seguridad de La InformaciónJhony HernándezAún no hay calificaciones
- Sistemas de AproximacionDocumento58 páginasSistemas de AproximacionEirick Wayne Zuñigga De-ItzelAún no hay calificaciones
- 0 Manual SAI Comet S31 (Instalacion)Documento18 páginas0 Manual SAI Comet S31 (Instalacion)Jesus Moreno del Alamo100% (1)
- Guia de Trabajo para La Fase 2 Del Curso de Dispositivos MovilesDocumento4 páginasGuia de Trabajo para La Fase 2 Del Curso de Dispositivos MovilesUSER32DLLAún no hay calificaciones
- Movitec Recss JunioDocumento4 páginasMovitec Recss JunioBraulio Ceballos SantanderAún no hay calificaciones
- PichulinDocumento4 páginasPichulinLund BeckAún no hay calificaciones
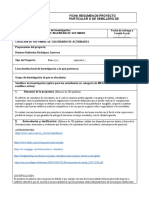
- Ficha Resumen de ProyectoDocumento4 páginasFicha Resumen de ProyectoDENISEE KATHERINE RODRIGUEZ GUERREROAún no hay calificaciones
- Que Es Mikrotik RouterOSDocumento34 páginasQue Es Mikrotik RouterOSinformaticaAún no hay calificaciones
- Práctica Logica Secuencial PLDDocumento17 páginasPráctica Logica Secuencial PLDAlex RMAún no hay calificaciones
- Actividad4 - Tecnologia-De La InformacionaplicadaalasempresasDocumento6 páginasActividad4 - Tecnologia-De La InformacionaplicadaalasempresasRAP 24/7Aún no hay calificaciones