También podría gustarte
- Proyecto Control 1Documento15 páginasProyecto Control 1Alexha MarthinezzAún no hay calificaciones
- Instalar Proteus CloudDocumento6 páginasInstalar Proteus CloudJEFERSON MONTOYA DEL CASTILLOAún no hay calificaciones
- Manicura y PedicuraDocumento11 páginasManicura y PedicuraVerito EscobarAún no hay calificaciones
- Comandos elementales para contactores de menos deDocumento6 páginasComandos elementales para contactores de menos deRichard MadruñeroAún no hay calificaciones
- Filtro Por CondensadorDocumento13 páginasFiltro Por CondensadorYesid Salcedo JimenezAún no hay calificaciones
- Digitalización, Reconstrucción de Señales y AliasingDocumento10 páginasDigitalización, Reconstrucción de Señales y AliasingOscar GóngoraAún no hay calificaciones
- Informe Actuadores 3Documento11 páginasInforme Actuadores 3Jose Fernando Higuera RamirezAún no hay calificaciones
- Laboratorio 2 Automatización Industrial (Completar)Documento11 páginasLaboratorio 2 Automatización Industrial (Completar)DANIEL ORLANDO SEGURA CABALLEROAún no hay calificaciones
- Reporte de Tacometro DigitalDocumento10 páginasReporte de Tacometro DigitalEsteban Padilla GonzalezAún no hay calificaciones
- Preparatorio8 ElectronicaPotenciaDocumento10 páginasPreparatorio8 ElectronicaPotenciaPablo CastilloAún no hay calificaciones
- Control de Instrumentacion PDFDocumento8 páginasControl de Instrumentacion PDFLania100% (1)
- Análisis e Implementación de Circuitos de Disparo PWMDocumento9 páginasAnálisis e Implementación de Circuitos de Disparo PWMRamiro BenavidesAún no hay calificaciones
- Circuitos Magneticos - EjerciciosDocumento1 páginaCircuitos Magneticos - Ejerciciosrafa puelloAún no hay calificaciones
- Informe Lab 2 ComunicacionesDocumento6 páginasInforme Lab 2 ComunicacionesYesid Felipe Acevedo ChaparroAún no hay calificaciones
- Linealización numérica con SIMULINKDocumento6 páginasLinealización numérica con SIMULINKjimenaAún no hay calificaciones
- PARCIAL1Documento13 páginasPARCIAL1Rey ArmandoAún no hay calificaciones
- Lab. Elect Industrial A - Practica 6 - Emilio Fuentes Carreon.Documento2 páginasLab. Elect Industrial A - Practica 6 - Emilio Fuentes Carreon.Emilio FuentesAún no hay calificaciones
- Motor de CC Parte #2Documento7 páginasMotor de CC Parte #2Coordinador Ejecutivo Juarez DosAún no hay calificaciones
- Muestreo y ReconstruccionDocumento6 páginasMuestreo y ReconstruccionDiegoAún no hay calificaciones
- Informe Maquinas - Despacho de P y Q GeneradorDocumento4 páginasInforme Maquinas - Despacho de P y Q GeneradorSebastian Franco Gonzalez0% (1)
- EjerciciosDocumento2 páginasEjercicioscristianAún no hay calificaciones
- Circuito de DisparoDocumento4 páginasCircuito de DisparoGabriel ScaceresAún no hay calificaciones
- PLD1 Ruiz Guzmán BryanDocumento25 páginasPLD1 Ruiz Guzmán BryanBryan Ruiz Guzmán100% (1)
- Preparatorio5 Jose PillajoDocumento8 páginasPreparatorio5 Jose PillajoJoséLuisPillajoAún no hay calificaciones
- Taller 001 Teoria de Control - PREGUNTASDocumento6 páginasTaller 001 Teoria de Control - PREGUNTASAllen YusedAún no hay calificaciones
- Clase 1 NDocumento38 páginasClase 1 Nwilliam.123Aún no hay calificaciones
- Resumen Del SCRDocumento6 páginasResumen Del SCRGustavo Gress GonzálezAún no hay calificaciones
- Control de fase AC-ACDocumento9 páginasControl de fase AC-ACAlejandro Sebastian Chicaiza TipanAún no hay calificaciones
- Ejemplos Resueltos Convertidor de CukDocumento12 páginasEjemplos Resueltos Convertidor de CukRonaldRodriguezSantos0% (1)
- Rectificador trifásico controlado MODocumento8 páginasRectificador trifásico controlado MONicolasAún no hay calificaciones
- Multiplexores y Demultiplexores en el IPNDocumento1 páginaMultiplexores y Demultiplexores en el IPNIván de Jesús PiñaAún no hay calificaciones
- Informe N°2 - Circuitos ElectronicosDocumento15 páginasInforme N°2 - Circuitos ElectronicosH Lizana BartholomeoAún no hay calificaciones
- Banderas AVR MicrocontroladorDocumento3 páginasBanderas AVR MicrocontroladorAlejandro Colorado100% (1)
- PRACTICA 9 Control de Fase DM 2020BDocumento9 páginasPRACTICA 9 Control de Fase DM 2020BAdolfo Rojas ArellanoAún no hay calificaciones
- Parcial 1 III Parte Ee TermDocumento4 páginasParcial 1 III Parte Ee TermJorge Isaac Flores SamaniegoAún no hay calificaciones
- Guia de Practica 03 - 81Documento11 páginasGuia de Practica 03 - 81miguelinferAún no hay calificaciones
- Laboratorio OTADocumento6 páginasLaboratorio OTAJuan Carlos PintoAún no hay calificaciones
- Practica 4 Maquinas SincronasDocumento8 páginasPractica 4 Maquinas SincronasDaxterMancerAún no hay calificaciones
- Sistemas Electrónicos InterfazDocumento15 páginasSistemas Electrónicos InterfazPacoAún no hay calificaciones
- Electonica de PotenciaDocumento6 páginasElectonica de PotenciaVictor Cerda MorenoAún no hay calificaciones
- Informe 2Documento9 páginasInforme 2Santiago DavidAún no hay calificaciones
- MicroCount: Software Gratuito Para Contar Colonias De MicroorganismosDocumento5 páginasMicroCount: Software Gratuito Para Contar Colonias De MicroorganismosSantiago Arevalo GómezAún no hay calificaciones
- Informe Laboratorio Maquinas 2 Maquinas en ParaleloDocumento4 páginasInforme Laboratorio Maquinas 2 Maquinas en ParaleloNicolas Alejandro Niño FonsecaAún no hay calificaciones
- Lab1.Redes de Polarización Del BJT JFET UNIDOSDocumento8 páginasLab1.Redes de Polarización Del BJT JFET UNIDOSAli David PaezAún no hay calificaciones
- Prac21 Rectificador Puente Monofasico SemicontroladoDocumento7 páginasPrac21 Rectificador Puente Monofasico SemicontroladojuliocesarmotaAún no hay calificaciones
- Informe Laboratorio 7Documento5 páginasInforme Laboratorio 7Jhon RodriguezAún no hay calificaciones
- Practica 7 Diodo ResueltaDocumento5 páginasPractica 7 Diodo Resueltajaime gandara100% (1)
- Prepa 9Documento15 páginasPrepa 9xavier2ramos-1100% (1)
- Informe Tecnico de Balanza Con Motor Brushless-1Documento23 páginasInforme Tecnico de Balanza Con Motor Brushless-1Leonardo RomoAún no hay calificaciones
- Acoplamiento CapacitivoDocumento11 páginasAcoplamiento CapacitivoMiguel Angel100% (1)
- Laboratorio RC RLDocumento10 páginasLaboratorio RC RLBrayan Alejandro Ruiz MahechaAún no hay calificaciones
- Taller Máquinas Eléctricas1Documento11 páginasTaller Máquinas Eléctricas1Alexander MayorgaAún no hay calificaciones
- Proyecto 1 CircuitosDocumento39 páginasProyecto 1 CircuitosJulian MartinezAún no hay calificaciones
- Lección 3. Rectificadores de Media Onda PDFDocumento10 páginasLección 3. Rectificadores de Media Onda PDFYoangel J. AlvarezAún no hay calificaciones
- Sistemas Tipo 0, Tipo 1, TipoDocumento19 páginasSistemas Tipo 0, Tipo 1, TipoPaola Sanchez CifuentesAún no hay calificaciones
- Taller 3Documento4 páginasTaller 3SANTIAGO ALFONSO MEDINA PEREZAún no hay calificaciones
- Protocolo OPAMPSDocumento12 páginasProtocolo OPAMPSEdgar B. GonzálezAún no hay calificaciones
- Muestreo y CuantificacionDocumento8 páginasMuestreo y CuantificacionJose Alejandro CerrutoAún no hay calificaciones
- Estrategias de Filtrado y Filtro de KalmanDocumento6 páginasEstrategias de Filtrado y Filtro de Kalmanjancarlos bermudezAún no hay calificaciones
- FINAL Informe Lab 1 SeñalesDocumento5 páginasFINAL Informe Lab 1 SeñalesJairo Nicolas Cardenas MorenoAún no hay calificaciones
- Discretización de señales analógicasDocumento24 páginasDiscretización de señales analógicasVictor Manuel Caballero PerezAún no hay calificaciones
- Sistema nervioso: Células, partes y funcionesDocumento3 páginasSistema nervioso: Células, partes y funcionesLuis Fernando ZLAún no hay calificaciones
- Existe Una Adecuada Planificación de CostosDocumento2 páginasExiste Una Adecuada Planificación de CostosJoshua Morales Valer86% (7)
- Tarea 3Documento5 páginasTarea 3Luis velozAún no hay calificaciones
- Mef Brechas EconimicasDocumento29 páginasMef Brechas EconimicasClay Rodriguez CornelioAún no hay calificaciones
- GEOGRAFICADocumento11 páginasGEOGRAFICAYvone C AvendañoAún no hay calificaciones
- Propuesta Técnica Supervision de Agua PotableDocumento59 páginasPropuesta Técnica Supervision de Agua Potablegraco aguilarAún no hay calificaciones
- Fórmula integral de CauchyDocumento29 páginasFórmula integral de CauchyEduardo AriasAún no hay calificaciones
- Tipos de PLCDocumento7 páginasTipos de PLCMike Angel CortesAún no hay calificaciones
- Pa Electronica 2020NDocumento5 páginasPa Electronica 2020NCarlos DanielAún no hay calificaciones
- Sapotaceae: características, biología floral y especies de la familiaDocumento6 páginasSapotaceae: características, biología floral y especies de la familiaKix Paulsen NajdorfAún no hay calificaciones
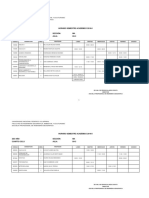
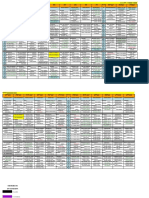
- E e S 7 Horarios T T 2023 Actualizado 16 03 2023Documento3 páginasE e S 7 Horarios T T 2023 Actualizado 16 03 2023tutoriales de tu serie favorita abigailAún no hay calificaciones
- Resumen Cap 2 Moléculas, Iones y Fórmulas QuímicasDocumento1 páginaResumen Cap 2 Moléculas, Iones y Fórmulas QuímicasSantiago LaraAún no hay calificaciones
- La enfermedad de Chagas y la lectoescrituraDocumento116 páginasLa enfermedad de Chagas y la lectoescrituraSaúl Oña MedranoAún no hay calificaciones
- SuprematismoDocumento43 páginasSuprematismoIxchel Racancoj100% (1)
- Apego - Bolwy With Cover Page v2Documento20 páginasApego - Bolwy With Cover Page v2ingridspulerAún no hay calificaciones
- Cómo Hacer Un Mapa de ProcesosDocumento16 páginasCómo Hacer Un Mapa de ProcesosKefrelet Thiler SaenzAún no hay calificaciones
- Eduardo Poot Sosa - Tarea 1Documento6 páginasEduardo Poot Sosa - Tarea 1Eduardo CullenAún no hay calificaciones
- Paso3 Enseñanza Aprendizaje Desde La Transposición DidácticaDocumento6 páginasPaso3 Enseñanza Aprendizaje Desde La Transposición Didácticaleidy barretoAún no hay calificaciones
- PLAN ESTRATEGICO XimenaDocumento4 páginasPLAN ESTRATEGICO XimenaCaroll RodríguezAún no hay calificaciones
- Mamposteria y Fontaneria PDFDocumento8 páginasMamposteria y Fontaneria PDFangel omar peraltaAún no hay calificaciones
- Rof ChanaDocumento62 páginasRof Chanamunichan2013Aún no hay calificaciones
- Repaso EstáticaDocumento4 páginasRepaso EstáticaIsa MoritaAún no hay calificaciones
- Taller N° 2 de EstructurasDocumento2 páginasTaller N° 2 de EstructurasMateo PeñaAún no hay calificaciones
- Max Test 2020 Mat EsDocumento72 páginasMax Test 2020 Mat EsHugo MamaniAún no hay calificaciones
- Taller PalancasDocumento3 páginasTaller PalancasLiliana LópezAún no hay calificaciones
- SECUENCIA DIDACTICA Administracion 5to Semestres Julio2013Documento15 páginasSECUENCIA DIDACTICA Administracion 5to Semestres Julio2013Ruben Leyva JimenezAún no hay calificaciones
- Saloni 2Documento16 páginasSaloni 2api-87295572Aún no hay calificaciones
- Guía 4. Soluciones y ColoidesDocumento5 páginasGuía 4. Soluciones y ColoidesGillary Peña MuñozAún no hay calificaciones
- Principales corrientes psicopedagógicas en educación infantilDocumento5 páginasPrincipales corrientes psicopedagógicas en educación infantilSilvia Eme CeAún no hay calificaciones