También podría gustarte
- S10 Registros ContadoresDocumento95 páginasS10 Registros Contadoresnelly100% (1)
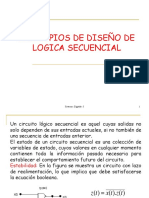
- Circuitos SecuencialesDocumento6 páginasCircuitos SecuencialesJorge Omar Zenil LabraAún no hay calificaciones
- Circuitos SecuencialesDocumento6 páginasCircuitos SecuencialesAlejandro RivasAún no hay calificaciones
- Analisis Tecnico de Los Mercados Financieros John MurphyDocumento20 páginasAnalisis Tecnico de Los Mercados Financieros John MurphyPablo CancinoAún no hay calificaciones
- Sistemas Digitales Lab 1Documento11 páginasSistemas Digitales Lab 1Pamela KarenAún no hay calificaciones
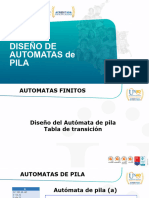
- Diseño Automata de PilaDocumento12 páginasDiseño Automata de PilaHeidy Lorena PalaciosAún no hay calificaciones
- Sistemas Lógicos SecuencialesDocumento10 páginasSistemas Lógicos SecuencialesJames Alexander Lara BetancourtAún no hay calificaciones
- Sistemas Lógicos SecuencialesDocumento34 páginasSistemas Lógicos SecuencialesAlejandro MontoyaAún no hay calificaciones
- Funcion de TransferenciaDocumento32 páginasFuncion de TransferenciaCarlosAún no hay calificaciones
- Pre Informe 1Documento9 páginasPre Informe 1Angelo CruzAún no hay calificaciones
- Conceptos Básicos Relés SEL - V1Documento48 páginasConceptos Básicos Relés SEL - V1Ricardo A Mellado MarínAún no hay calificaciones
- 0 Clase 1 Flip FlopDocumento26 páginas0 Clase 1 Flip FlopJose Luis ZabaletaAún no hay calificaciones
- Sistemas Digitales III Laboratorio 1Documento10 páginasSistemas Digitales III Laboratorio 1Pamela KarenAún no hay calificaciones
- Pid MatlabDocumento14 páginasPid MatlabJersonAgudeloVeraAún no hay calificaciones
- 02-Aplicaciones Reales Laplace (TC) PDFDocumento42 páginas02-Aplicaciones Reales Laplace (TC) PDFJuan AlvaradoAún no hay calificaciones
- Registros y ContadoresDocumento24 páginasRegistros y ContadoresFrancisca IgnaciaAún no hay calificaciones
- 2.función de Transferencia 2022 v2Documento41 páginas2.función de Transferencia 2022 v2victorAún no hay calificaciones
- U01 - Logica SecuencialDocumento50 páginasU01 - Logica SecuencialYohanny Garcia SalazarAún no hay calificaciones
- S07.s4 - CONDENSA R-CDocumento5 páginasS07.s4 - CONDENSA R-CJOSE LEGUAAún no hay calificaciones
- ED-Circuitos Secuenciales. BiestablesDocumento14 páginasED-Circuitos Secuenciales. BiestablesEduardaAún no hay calificaciones
- Clase 8 - Tema 4. Dispositivos Secuenciales y Contadores 2021-2Documento7 páginasClase 8 - Tema 4. Dispositivos Secuenciales y Contadores 2021-2Favela QuinteroAún no hay calificaciones
- Los Flip FlopDocumento18 páginasLos Flip FloproxanaAún no hay calificaciones
- Tema8 Fund 0405Documento14 páginasTema8 Fund 0405Jesus StevenAún no hay calificaciones
- Circuitos Secuenciales: Analisis Y Diseño Con RegistrosDocumento17 páginasCircuitos Secuenciales: Analisis Y Diseño Con RegistrosluisutorAún no hay calificaciones
- AC Reg Clase4 Ver2018Documento75 páginasAC Reg Clase4 Ver2018Rafael Ranchez MontalvoAún no hay calificaciones
- Circuitos ContadoresDocumento26 páginasCircuitos ContadoresJoséM.PintoCarpioAún no hay calificaciones
- Circuitos Secuenciales Asincronos PDFDocumento51 páginasCircuitos Secuenciales Asincronos PDFAbigail CoraiteAún no hay calificaciones
- Electronica Digital Apuntes Unidad 4 Flip FlopsDocumento15 páginasElectronica Digital Apuntes Unidad 4 Flip FlopsJuan Carlos CamposAún no hay calificaciones
- Clase 05 Diagrama de Bloques y Espacio de EstadosDocumento37 páginasClase 05 Diagrama de Bloques y Espacio de EstadosJoshuaAún no hay calificaciones
- Notas - Circuitos SincronosDocumento5 páginasNotas - Circuitos SincronosJULIO CESAR HERRERA LEVANOAún no hay calificaciones
- Sesion 11 - Flip FlopDocumento22 páginasSesion 11 - Flip FlopKevin B SánchezAún no hay calificaciones
- Clase Virtual Biela Manivela 2020 (Todas Las Carreras)Documento22 páginasClase Virtual Biela Manivela 2020 (Todas Las Carreras)loloAún no hay calificaciones
- 7 Logica SecuencialDocumento44 páginas7 Logica SecuencialulisesAún no hay calificaciones
- Flip FlopsDocumento13 páginasFlip FlopsDiego SantacruzAún no hay calificaciones
- Presentacion Parte 2Documento94 páginasPresentacion Parte 2José Aguilar TovarAún no hay calificaciones
- Probo Sci L AdoresDocumento12 páginasProbo Sci L AdoresMiguel Ch MamaniAún no hay calificaciones
- Programacion Flip FlopDocumento12 páginasProgramacion Flip Flopheynner herreraAún no hay calificaciones
- 2023 - 1º CLase PracticaDocumento14 páginas2023 - 1º CLase PracticaJoaco CedresAún no hay calificaciones
- Registros de DesplazamientoDocumento17 páginasRegistros de DesplazamientoJULIÁN SAÚL DÁVILA REQUE100% (1)
- P3 Info Caract Dinám Filtro Pbjas y PaltasDocumento8 páginasP3 Info Caract Dinám Filtro Pbjas y PaltasFrancisco BaezAún no hay calificaciones
- 2.función de Transferencia 2022Documento33 páginas2.función de Transferencia 2022Bernardo EscorciaAún no hay calificaciones
- Biestables Asincronos y SincronosDocumento13 páginasBiestables Asincronos y SincronosALESSANDRAAún no hay calificaciones
- Registro UniversalDocumento10 páginasRegistro UniversalNathy NiamaAún no hay calificaciones
- Reporte de SatisfacciónDocumento1 páginaReporte de SatisfacciónOscar Morán LópezAún no hay calificaciones
- Plantilla - PDS Rodrigo Julio ALegría LlorenteDocumento20 páginasPlantilla - PDS Rodrigo Julio ALegría Llorentediego martinezAún no hay calificaciones
- Caracteristicas BiestablesDocumento48 páginasCaracteristicas BiestablesJose Javier Tercero Campos0% (2)
- Modelamiento Matematico de Un Tanque de Nivel Funcion TransferenciaDocumento5 páginasModelamiento Matematico de Un Tanque de Nivel Funcion TransferenciaOlesya SergeevaAún no hay calificaciones
- Sistemas Digitales I Previo IDocumento8 páginasSistemas Digitales I Previo IPamela KarenAún no hay calificaciones
- Lab 1 de Ing Control I UnacDocumento9 páginasLab 1 de Ing Control I Unacsaul100% (1)
- Digital Bloques SecuencialesDocumento26 páginasDigital Bloques Secuencialescarlos orregoAún no hay calificaciones
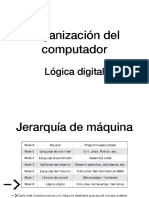
- C5 - Logica Digital 2Documento40 páginasC5 - Logica Digital 2Alexander IbarraAún no hay calificaciones
- Práctica Calificada 01Documento3 páginasPráctica Calificada 01Juan Carlos RamosAún no hay calificaciones
- Automatas Programables PDFDocumento94 páginasAutomatas Programables PDFKenia A CqAún no hay calificaciones
- Tema5.APND GICDocumento56 páginasTema5.APND GICJulia CallabaAún no hay calificaciones
- 9.1 Diagrama de Bloques y Funciones de Prueba 2017 PDFDocumento23 páginas9.1 Diagrama de Bloques y Funciones de Prueba 2017 PDFbresler_linAún no hay calificaciones
- Modelacion Dinamica de Sistemas de Control Unidad 2Documento20 páginasModelacion Dinamica de Sistemas de Control Unidad 2Fernando GarciaAún no hay calificaciones
- Existe Una Discusión Historiográfica Acerca de LaDocumento1 páginaExiste Una Discusión Historiográfica Acerca de LaMatias ArandaAún no hay calificaciones
- Art Nouveau - EV GBDocumento12 páginasArt Nouveau - EV GBVivian BuitragoAún no hay calificaciones
- Que Es El Modelo de Coste Completo o Full CostingDocumento2 páginasQue Es El Modelo de Coste Completo o Full CostingJUANMI CHIKAún no hay calificaciones
- Agenda Económica BolivarianaDocumento13 páginasAgenda Económica BolivarianaJennyfer de VelascoAún no hay calificaciones
- Evidencia-2-Instalacion y Prueba FuncionalDocumento11 páginasEvidencia-2-Instalacion y Prueba Funcionaldiego collazosAún no hay calificaciones
- Contrato de Arrendamiento de Vivienda en Aplicación Del SubsidioDocumento4 páginasContrato de Arrendamiento de Vivienda en Aplicación Del SubsidioJulián Andrés Posada100% (1)
- 3B Sem7 S5 Alg FR SealDocumento1 página3B Sem7 S5 Alg FR SealJahir Amanqui HallasiAún no hay calificaciones
- Incidente de Ejecucion de Sentencia - Gloria (Recuperado Automáticamente)Documento6 páginasIncidente de Ejecucion de Sentencia - Gloria (Recuperado Automáticamente)alberto riveraAún no hay calificaciones
- El Juridico PeriodicoDocumento20 páginasEl Juridico PeriodicoHortencia RestrepoAún no hay calificaciones
- Caso - Practico - Estrategia de Empresa - Caso 2Documento4 páginasCaso - Practico - Estrategia de Empresa - Caso 2Asterisko PublicidadAún no hay calificaciones
- Campamento Gestion de La CalidadDocumento29 páginasCampamento Gestion de La CalidadpavelbtAún no hay calificaciones
- 8997 6783 00 Spare Parts Catalog - ST08Documento878 páginas8997 6783 00 Spare Parts Catalog - ST08ricardo100% (2)
- Actividad 1.1 CoimDocumento11 páginasActividad 1.1 CoimetienneAún no hay calificaciones
- Compilado CorrespondenciaDocumento72 páginasCompilado CorrespondenciaAidé Lupita San JaramilloAún no hay calificaciones
- UFEdz CWVQgwmi XDocumento113 páginasUFEdz CWVQgwmi Xpimpo_1003020Aún no hay calificaciones
- Sistema AporticadoDocumento8 páginasSistema AporticadoKarla Cárdenas MazanettAún no hay calificaciones
- Viajes de Simón Bolívar, El LibertadorDocumento1 páginaViajes de Simón Bolívar, El LibertadorDanny ILAún no hay calificaciones
- Adorno y HorkheimerDocumento2 páginasAdorno y HorkheimermayraAún no hay calificaciones
- Maximizacion de Beneficios y OfertaDocumento12 páginasMaximizacion de Beneficios y OfertaUSERNAME234552Aún no hay calificaciones
- Marco TeoricoDocumento6 páginasMarco TeoricoNacho COrtizAún no hay calificaciones
- Primeros Ejercicios en JavaDocumento4 páginasPrimeros Ejercicios en JavaRaul R Mena TzelAún no hay calificaciones
- Caso de Red OnlineDocumento2 páginasCaso de Red OnlinecarlostoneAún no hay calificaciones
- Glosario Diseño GráficoDocumento11 páginasGlosario Diseño GráficoAlex HDZAún no hay calificaciones
- Promesa CV San Francisco Campestre II Con Observaciones FiduciaDocumento21 páginasPromesa CV San Francisco Campestre II Con Observaciones FiduciaMauricio Quintero PosadaAún no hay calificaciones
- Competencias Docentes 2Documento21 páginasCompetencias Docentes 2Eduardo QuevedoAún no hay calificaciones
- Clase 14. La ExtradiciónDocumento18 páginasClase 14. La ExtradiciónAdrymoranAún no hay calificaciones
- Mercado de CambioDocumento3 páginasMercado de CambioBelen PerezAún no hay calificaciones
- Tendencias de Emulsificación Potenciales de Las Prácticas de ProducciónDocumento1 páginaTendencias de Emulsificación Potenciales de Las Prácticas de ProducciónjoseAún no hay calificaciones
- Sistemas Auxiliares Unid 2Documento3 páginasSistemas Auxiliares Unid 2Ivan MöntalvöAún no hay calificaciones
- Lineamientos Inicio Del Año Escolar 2020-2021Documento3 páginasLineamientos Inicio Del Año Escolar 2020-2021Lucinda ToledoAún no hay calificaciones