También podría gustarte
- Ejercicios de Sistemas de Control No LinealDocumento9 páginasEjercicios de Sistemas de Control No LinealjlmunozmezaAún no hay calificaciones
- Integracion NumericaDocumento18 páginasIntegracion NumericaAgustin LazzariAún no hay calificaciones
- Minimos Cuadrados NO DEFINITIVO 1Documento3 páginasMinimos Cuadrados NO DEFINITIVO 1Marcelo Valentín AriasAún no hay calificaciones
- 07 Descargable 4Documento5 páginas07 Descargable 4Rodrigo RestrepoAún no hay calificaciones
- Lista de Ejercicios 2.2 - 2020-2AB-SolucionDocumento4 páginasLista de Ejercicios 2.2 - 2020-2AB-SolucionJorge FernándezAún no hay calificaciones
- EJERCICIOS Ecuaciones DiferencialesDocumento13 páginasEJERCICIOS Ecuaciones DiferencialesAlexander GonzalezAún no hay calificaciones
- ALGEBRA LINEAL Taller Sumativo 1. - SoluciónDocumento3 páginasALGEBRA LINEAL Taller Sumativo 1. - SolucióngatoAún no hay calificaciones
- LHR Tema 1 4Documento4 páginasLHR Tema 1 4Lili HernandezAún no hay calificaciones
- MA265 Sesión 11.2 Bas-Gen-Ind (Libro)Documento12 páginasMA265 Sesión 11.2 Bas-Gen-Ind (Libro)MisyAún no hay calificaciones
- Mamt2 U2 A2 V2 RaicDocumento4 páginasMamt2 U2 A2 V2 RaicRaúl Sánchez100% (2)
- (MAT 99) 09 15 EcDocumento16 páginas(MAT 99) 09 15 EcAbad Jhenny CruzAún no hay calificaciones
- Material Del Curso Semana 10Documento17 páginasMaterial Del Curso Semana 10BREINER ANDREY VEGA HERNANDEZAún no hay calificaciones
- Preguntas de RepasoDocumento6 páginasPreguntas de Repasojosenoibercubasdiaz111Aún no hay calificaciones
- CholeskyDocumento6 páginasCholeskyDavidGomezAún no hay calificaciones
- 2023 I Pao CV Ts1 p104 SoluciónDocumento6 páginas2023 I Pao CV Ts1 p104 Soluciónjosse obandoAún no hay calificaciones
- ALGEBRA LINEAL EXAMEN Sol y Rub Ex Final AL PAE23Documento9 páginasALGEBRA LINEAL EXAMEN Sol y Rub Ex Final AL PAE23gatoAún no hay calificaciones
- CONVERSION EN REACTOR NO IDEALL - Aux, MET-3345 #10Documento7 páginasCONVERSION EN REACTOR NO IDEALL - Aux, MET-3345 #10Víctor AguilarAún no hay calificaciones
- Taller No 2 de Sistemas Dinamicos y TCDocumento10 páginasTaller No 2 de Sistemas Dinamicos y TCJhon Fredy Perez ZamudioAún no hay calificaciones
- Ejercicio 4 LibroDocumento4 páginasEjercicio 4 LibroAlbert Richard Miranda SivilaAún no hay calificaciones
- Trazadores CuadráticosDocumento4 páginasTrazadores CuadráticosDaniel NaranjoAún no hay calificaciones
- Ecuaciones Diferenciales Lineales de Orden SuperiorDocumento49 páginasEcuaciones Diferenciales Lineales de Orden SuperiorIvan MundoAún no hay calificaciones
- Solucionario 1P Mat-103 (I-2023)Documento4 páginasSolucionario 1P Mat-103 (I-2023)Josue PañoAún no hay calificaciones
- Reporte Practica 1 Equipo 9Documento18 páginasReporte Practica 1 Equipo 9Anonymous bqJDeCNIAún no hay calificaciones
- Ejercicios Adicionales Unidad 3Documento5 páginasEjercicios Adicionales Unidad 3GenesisCarreroRivasAún no hay calificaciones
- Problema Espacios Vectoriales CompletoDocumento3 páginasProblema Espacios Vectoriales CompletoLucas aaaAún no hay calificaciones
- AYGA - 2023 - Notas de Cátedra y Práctica Unidad N°6 - Espacios VectorialesyTLDocumento15 páginasAYGA - 2023 - Notas de Cátedra y Práctica Unidad N°6 - Espacios VectorialesyTLGeremias Lautaro OrtizAún no hay calificaciones
- Clase 1 y 2. Espacios Vectoriales SubespaciosDocumento18 páginasClase 1 y 2. Espacios Vectoriales SubespaciosJesus MachtaAún no hay calificaciones
- Notas - Matrices, SE y DeterminantesDocumento26 páginasNotas - Matrices, SE y DeterminantesDiego Ismael VargasAún no hay calificaciones
- 3-4-10 Tranformada de Laplace de La Funcion Delta DiracDocumento4 páginas3-4-10 Tranformada de Laplace de La Funcion Delta DiracjesicaAún no hay calificaciones
- Examen Final - Ecuaciones Diferenciales-Verano-SolucionesDocumento6 páginasExamen Final - Ecuaciones Diferenciales-Verano-SolucioneskevinAún no hay calificaciones
- Trabajo Completo Control Primera FaseDocumento66 páginasTrabajo Completo Control Primera FaseJuniior Cabrera BolivarAún no hay calificaciones
- Perfil de Temperaturas de Una Aleta TriangularDocumento4 páginasPerfil de Temperaturas de Una Aleta TriangularFernanda Carrión VarasAún no hay calificaciones
- Ingenieria de Las Reacciones Quimicas - Reacciones MultiplesDocumento10 páginasIngenieria de Las Reacciones Quimicas - Reacciones MultiplesBelkys GalarzaAún no hay calificaciones
- Sistemas de Ecuaciones Diferenciales LinealesDocumento9 páginasSistemas de Ecuaciones Diferenciales LinealesCristian0% (1)
- Taller de Sistemas JH PDFDocumento7 páginasTaller de Sistemas JH PDFJhonnier CasallasAún no hay calificaciones
- 04 Espacio Vectorial P2Documento30 páginas04 Espacio Vectorial P2freddyAún no hay calificaciones
- Ejercicios 1, 2, 3, 5.Documento10 páginasEjercicios 1, 2, 3, 5.Marly Yulieth NuñezAún no hay calificaciones
- Ecuaciones Diferenciales Parciales HiperbólicasDocumento18 páginasEcuaciones Diferenciales Parciales HiperbólicasJacksonBradyHuamanPinedoAún no hay calificaciones
- Tarea de Muller y BairstowDocumento5 páginasTarea de Muller y BairstowandresAún no hay calificaciones
- MA-1116 Segundo Parcial 2014 Sep-Dic Tipo B (Solución)Documento4 páginasMA-1116 Segundo Parcial 2014 Sep-Dic Tipo B (Solución)Jeam MontielAún no hay calificaciones
- 3 - Dependencia e Independencia Lineal Base y DimensiónDocumento4 páginas3 - Dependencia e Independencia Lineal Base y DimensiónANDRES STEVEN LLAMUCA CULQUIAún no hay calificaciones
- Solución Álgebra Lineal ESPOL 2016 2TDocumento5 páginasSolución Álgebra Lineal ESPOL 2016 2TÁngel Guale100% (4)
- Preparaduría 1. MA-2113. Saúl Utrera PDFDocumento18 páginasPreparaduría 1. MA-2113. Saúl Utrera PDFSaul Utrera BarriosAún no hay calificaciones
- Ejercicios ResueltosDocumento5 páginasEjercicios ResueltosFrank YauriAún no hay calificaciones
- Solución de La Segunda Evaluación de Algebra Lineal-I Término 2018 PDFDocumento8 páginasSolución de La Segunda Evaluación de Algebra Lineal-I Término 2018 PDFandresAún no hay calificaciones
- Serie de TaylorDocumento3 páginasSerie de TaylorIsraelAún no hay calificaciones
- Unidad 4 - Fuente 1Documento39 páginasUnidad 4 - Fuente 1Valentina WetzelAún no hay calificaciones
- 2758 - Grupo 3 - Taller 3Documento19 páginas2758 - Grupo 3 - Taller 3Kevin CaicedoAún no hay calificaciones
- Práctica 5 - An IDocumento8 páginasPráctica 5 - An IImmanuel CristianAún no hay calificaciones
- Módulo 3 - Metodos Iterativos en Sistemas LinealesDocumento38 páginasMódulo 3 - Metodos Iterativos en Sistemas LinealesMaximo De La Cruz DamianAún no hay calificaciones
- PL - Método SimplexDocumento17 páginasPL - Método SimplexMaria GuerraAún no hay calificaciones
- TEORÍA DE CIRCUITOS II Mallas y NodosDocumento6 páginasTEORÍA DE CIRCUITOS II Mallas y NodosBismarck ArismendiAún no hay calificaciones
- Tarea 5 Analisis NumericoDocumento5 páginasTarea 5 Analisis NumericoERIK DAVID APONTE PINOAún no hay calificaciones
- LeytonsDocumento4 páginasLeytonsEdgar Anddy Loarte PacherresAún no hay calificaciones
- Ecuación y Función CuadráticaDocumento6 páginasEcuación y Función CuadráticaDiego Alfonso100% (1)
- Problemas EDoS SRW y PR CO2Documento8 páginasProblemas EDoS SRW y PR CO2x95z4xr7tpAún no hay calificaciones
- Sol 2do Par Mat-1103Documento6 páginasSol 2do Par Mat-1103DK C Reynaldo Poma QuispeAún no hay calificaciones
- Taller de ÁlgebraDocumento3 páginasTaller de ÁlgebraNelly CaroAún no hay calificaciones
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- Trabajo de Normas ISADocumento14 páginasTrabajo de Normas ISAysbecarmenAún no hay calificaciones
- Los 3 Males EspañolDocumento6 páginasLos 3 Males EspañolOscar TipantaxiAún no hay calificaciones
- Delitos InformaticosDocumento10 páginasDelitos InformaticosVictor VelezAún no hay calificaciones
- 1.1 Fundamentos Teóricos de Administración y ProducciónDocumento12 páginas1.1 Fundamentos Teóricos de Administración y ProducciónpanditaAún no hay calificaciones
- Ejercicio Ordinograma 1Documento2 páginasEjercicio Ordinograma 1Manuel CuberoAún no hay calificaciones
- PDF Guia Instalador Tecnico CompressDocumento80 páginasPDF Guia Instalador Tecnico Compressfergot2010Aún no hay calificaciones
- 3ergrado 180401190003Documento98 páginas3ergrado 180401190003variedades david0% (1)
- Informe FinalDocumento68 páginasInforme FinalBGCG 26Aún no hay calificaciones
- NSE1 - Cuestionario 1Documento2 páginasNSE1 - Cuestionario 1Emm RiuAún no hay calificaciones
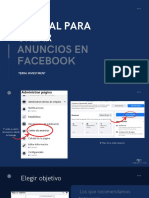
- Manual para Crear Anuncios en FacebookDocumento8 páginasManual para Crear Anuncios en FacebookAda LopezAún no hay calificaciones
- INVESTIGACION OPERATIVA I - Reducción y Sistema 3x3Documento17 páginasINVESTIGACION OPERATIVA I - Reducción y Sistema 3x3Juanny Gil GuerreroAún no hay calificaciones
- 03 NumerosReales Diapositivas PDFDocumento153 páginas03 NumerosReales Diapositivas PDFDilan MateoAún no hay calificaciones
- Interdisciplinariedad de La Producción Científica Sobre El Discurso Del Odio y Las Redes Sociales: Un Análisis BibliométricoDocumento12 páginasInterdisciplinariedad de La Producción Científica Sobre El Discurso Del Odio y Las Redes Sociales: Un Análisis BibliométricoedyAún no hay calificaciones
- Harvestline Manual Operacion ParteDocumento65 páginasHarvestline Manual Operacion ParteJohn SanzanaAún no hay calificaciones
- Manual Servicio OS7030 EsDocumento235 páginasManual Servicio OS7030 EsIsaac Nava100% (1)
- NOM-Z-61-1987 Simbolos e Identificacion de Instrumentos.Documento9 páginasNOM-Z-61-1987 Simbolos e Identificacion de Instrumentos.henrry Antonio diaz gilAún no hay calificaciones
- El Nuevo Gestor de Solicitudes Es 832 DigitalDocumento2 páginasEl Nuevo Gestor de Solicitudes Es 832 DigitalJhon Jairo AcostaAún no hay calificaciones
- Actividad 1 Evidencia 2Documento7 páginasActividad 1 Evidencia 2jorgeAún no hay calificaciones
- Composicion Por ColorDocumento95 páginasComposicion Por Colorjose crisantoAún no hay calificaciones
- CAPITULOS 1 2 3, 4 5 y 6 (29 DE MAYO)Documento62 páginasCAPITULOS 1 2 3, 4 5 y 6 (29 DE MAYO)Angélica caballeroAún no hay calificaciones
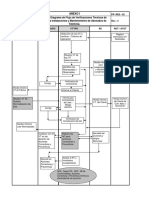
- Anexo I Diagrama de Flujo VT - Rev.03Documento1 páginaAnexo I Diagrama de Flujo VT - Rev.03JORGE DAVID SOLORZANO LORONAAún no hay calificaciones
- TRANSPORTEDocumento35 páginasTRANSPORTEGRUPO 5Aún no hay calificaciones
- Reglas de Codd Motores de Base de DatosDocumento27 páginasReglas de Codd Motores de Base de DatosFelipeA.DuránRodriguezAún no hay calificaciones
- Asignacion Automatica Rugosidad GEASIGDocumento7 páginasAsignacion Automatica Rugosidad GEASIGluis riveros chahuayoAún no hay calificaciones
- Qué Es Una Red InformaticaDocumento1 páginaQué Es Una Red InformaticaAdRii GuillEnAún no hay calificaciones
- Comprensión de Los Diagramas y Símbolos Del BPMNDocumento4 páginasComprensión de Los Diagramas y Símbolos Del BPMNClaudia María LopezAún no hay calificaciones
- CONTROLT Documento Especificacion Integracion API HUB integratedLicensePlate PDFDocumento8 páginasCONTROLT Documento Especificacion Integracion API HUB integratedLicensePlate PDFcarlos carrilloAún no hay calificaciones
- Laboratorio 7 - Experimento 13 y 14Documento32 páginasLaboratorio 7 - Experimento 13 y 14Alberto GutierrezAún no hay calificaciones
- Practica 1 - MERDocumento3 páginasPractica 1 - MERNyx SaenzAún no hay calificaciones
- Proyecto 1Documento3 páginasProyecto 1Daniela Belen Hernández ObandoAún no hay calificaciones