También podría gustarte
- Cuestionario Tema 5 Con Soluciones PDFDocumento20 páginasCuestionario Tema 5 Con Soluciones PDFMary Cruz Meza Cahuana83% (6)
- Solucionario Instalaciones - Electricas - Interiores - 2019 PDFDocumento112 páginasSolucionario Instalaciones - Electricas - Interiores - 2019 PDFPAULI PUL100% (3)
- ExamDocumento13 páginasExamlauAún no hay calificaciones
- Iei05 Tarea2Documento11 páginasIei05 Tarea2miuv89% (9)
- Dibuja Los Símbolos, para El Circuito de Mando y Fuerza, Relacionados Con El Relé Térmico.Documento23 páginasDibuja Los Símbolos, para El Circuito de Mando y Fuerza, Relacionados Con El Relé Térmico.Camila Vallejos100% (6)
- Cuestionariostema3 (Protecciones) ConsolucionesDocumento32 páginasCuestionariostema3 (Protecciones) ConsolucionesCristian Muñoz50% (2)
- Cuestionario 1 Entrega Viernes 26 SOLDocumento9 páginasCuestionario 1 Entrega Viernes 26 SOLFrancisco de Paula González Rodríguez100% (1)
- 05 Ejercicios Logica Cableada REEADocumento62 páginas05 Ejercicios Logica Cableada REEAEdward Erney Salas Valenzuela100% (1)
- Solucionario LA Unidad1 IEBDocumento16 páginasSolucionario LA Unidad1 IEBAnton Anton100% (1)
- Koleos-2 0DDocumento3 páginasKoleos-2 0DFernando Sanchez0% (1)
- Actividades Tema 6Documento4 páginasActividades Tema 6WT FAún no hay calificaciones
- Segurola Martinez Arkaitz AI04 Tarea4.2Documento3 páginasSegurola Martinez Arkaitz AI04 Tarea4.2Arkaitz Segurola Martinez100% (2)
- Tarea 8 Automatismos IndustrialesDocumento1 páginaTarea 8 Automatismos IndustrialesAntonio Cano0% (5)
- Ejercicios Proyectos-Cpu-S7-1200Documento21 páginasEjercicios Proyectos-Cpu-S7-1200Jose Manuel Moa Perez100% (3)
- 3 Protección de InstalacionesDocumento12 páginas3 Protección de InstalacionesFrancisco de Paula González Rodríguez60% (5)
- Ai Tarea12Documento6 páginasAi Tarea12jose antonio moral frias100% (1)
- Ai10 Tarea1Documento6 páginasAi10 Tarea1Jueguitos Mundo100% (1)
- Ejercicios Automatismos ElectricosDocumento2 páginasEjercicios Automatismos ElectricosPaul Cárdenas100% (1)
- Autómatas ProgramablesDocumento6 páginasAutómatas ProgramablesaquiumAún no hay calificaciones
- T3 2Documento4 páginasT3 2mariajolopez2002Aún no hay calificaciones
- Iei08 Tarea1 Juan JoséDocumento6 páginasIei08 Tarea1 Juan JoséBel Sal50% (2)
- 02-Circuitos Básicos Con ContactoresDocumento16 páginas02-Circuitos Básicos Con ContactoresAnonymous MbqTZHLNR9Aún no hay calificaciones
- Ejercicios Automatismos ElectricosDocumento2 páginasEjercicios Automatismos ElectricosJonatan García Gómez0% (1)
- Ictv08 Te1 8Documento6 páginasIctv08 Te1 8TxoskeSarasketaOsa100% (2)
- Cuestionario Tema 7 - SolucionesDocumento22 páginasCuestionario Tema 7 - Solucionesluis gomez100% (5)
- Ejercicios Con Logo PDFDocumento40 páginasEjercicios Con Logo PDFramiro11062011100% (1)
- Sistemas de Automatización Industrial IDocumento3 páginasSistemas de Automatización Industrial Icawana quiroz100% (1)
- Ejemplos Resueltos ElectricidadDocumento5 páginasEjemplos Resueltos ElectricidadDavid Ferreira LopezAún no hay calificaciones
- Ejercicios de Automatismos IDocumento3 páginasEjercicios de Automatismos Ircalienes100% (1)
- Solucionario Ins Distribuion UD06Documento14 páginasSolucionario Ins Distribuion UD06Enric PonsAún no hay calificaciones
- Examen Instalaciones de DistribucionDocumento3 páginasExamen Instalaciones de DistribucionJose Cervera100% (1)
- Preguntas Teóricas de La Itc-Bt-14Documento2 páginasPreguntas Teóricas de La Itc-Bt-14adnanebensAún no hay calificaciones
- 1 Envolventes y Cuadros EléctricosDocumento5 páginas1 Envolventes y Cuadros EléctricosFrancisco de Paula González RodríguezAún no hay calificaciones
- Bloque de Ejercicios 03 Ejercicios Con Contactores PDFDocumento2 páginasBloque de Ejercicios 03 Ejercicios Con Contactores PDFMark Antony Fernández AguilarAún no hay calificaciones
- Ejercicios para Realizar Esquemas de Fuerza y de MandoDocumento2 páginasEjercicios para Realizar Esquemas de Fuerza y de MandoalexisAún no hay calificaciones
- Ejercicios Instalaciones Distribucion PDFDocumento4 páginasEjercicios Instalaciones Distribucion PDFMaría OntiveroAún no hay calificaciones
- Ai07 Tarea3 AutomatismoDocumento1 páginaAi07 Tarea3 AutomatismoLuis Alvarez100% (1)
- CUESTIONARIOPROTECCIONESDocumento14 páginasCUESTIONARIOPROTECCIONESJose Carlos MorenoAún no hay calificaciones
- Solucionario Maquinas Electricas 2021 UD1 PDFDocumento6 páginasSolucionario Maquinas Electricas 2021 UD1 PDFIvan100% (1)
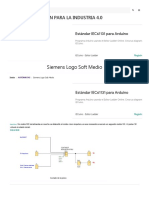
- Siemens Logo Soft Medio - Formación para La Industria 4.0Documento6 páginasSiemens Logo Soft Medio - Formación para La Industria 4.0Gustavo CircelliAún no hay calificaciones
- Automatismos GMDocumento387 páginasAutomatismos GMDavid Fraile100% (1)
- Y Tioula LogoDocumento37 páginasY Tioula LogoYassineAún no hay calificaciones
- Cuestionario PLC AlumnoDocumento4 páginasCuestionario PLC AlumnoFrancisco de Paula González RodríguezAún no hay calificaciones
- Automatismos Tema 3Documento4 páginasAutomatismos Tema 3ALfredo ROldanAún no hay calificaciones
- Guia 13Documento16 páginasGuia 13Luis Angel BravoAún no hay calificaciones
- Cade - Simu GrafcetDocumento5 páginasCade - Simu GrafcetantornioAún no hay calificaciones
- Memoria Marcha Paro TemporizadoDocumento5 páginasMemoria Marcha Paro Temporizadozakaria rahmaniAún no hay calificaciones
- Tema Instalaciones ElectrotecnicasDocumento14 páginasTema Instalaciones ElectrotecnicasPablo NarvaezAún no hay calificaciones
- Ejercicios Con Temporizadores 49-54 59,63, y 67Documento1 páginaEjercicios Con Temporizadores 49-54 59,63, y 67luis gomez100% (3)
- Ele05 Tarea1 Juan JoseDocumento9 páginasEle05 Tarea1 Juan JoseBel SalAún no hay calificaciones
- Ejercicios de Diagrama LadderDocumento3 páginasEjercicios de Diagrama LadderExterminador de Alienigenas40% (5)
- 01 Resumido Conceptos y Fenomenos ElectricosDocumento13 páginas01 Resumido Conceptos y Fenomenos ElectricosManuel Uroz Sorroche100% (1)
- Ejercicios AutomatismosDocumento8 páginasEjercicios AutomatismosWill Ludeñaa100% (1)
- Automatismos Electricos PDFDocumento46 páginasAutomatismos Electricos PDFcenycenyAún no hay calificaciones
- Arranque EstrellaDocumento7 páginasArranque EstrellaChristian FloresAún no hay calificaciones
- Auto Lab 2Documento14 páginasAuto Lab 2Alexandra B. MuñozAún no hay calificaciones
- 2-Automatismos Electricos2Documento102 páginas2-Automatismos Electricos2Álvaro ArangoAún no hay calificaciones
- Automatismo Cableado Hoja-1Documento3 páginasAutomatismo Cableado Hoja-1jjurado183Aún no hay calificaciones
- Practica2 Simulacion PLCDocumento14 páginasPractica2 Simulacion PLCnohemy condo machaca100% (1)
- Informe de Accionamiento 2Documento7 páginasInforme de Accionamiento 2arnold aldoAún no hay calificaciones
- Arrancadores PracticaDocumento21 páginasArrancadores PracticaJorge Antonio Silva Rodriguez100% (1)
- Inventario de TablerosDocumento4 páginasInventario de Tablerosluis gomezAún no hay calificaciones
- Modelo de Solicitud de Constancia de TrabajoDocumento1 páginaModelo de Solicitud de Constancia de Trabajoluis gomezAún no hay calificaciones
- Trabajo Final de Medio AmbienteDocumento4 páginasTrabajo Final de Medio Ambienteluis gomezAún no hay calificaciones
- Presentacion Energias RenovablesDocumento2 páginasPresentacion Energias Renovablesluis gomezAún no hay calificaciones
- BoliviaDocumento34 páginasBolivialuis gomezAún no hay calificaciones
- Plan Anual de Mantenimiento 2015 Ultimo 25.03.15Documento976 páginasPlan Anual de Mantenimiento 2015 Ultimo 25.03.15luis gomez100% (2)
- Cuestionario Regulacion 2016Documento6 páginasCuestionario Regulacion 2016luis gomezAún no hay calificaciones
- Curriculum RaquelDocumento3 páginasCurriculum Raquelluis gomezAún no hay calificaciones
- Certificacion de EntregaDocumento26 páginasCertificacion de Entregaluis gomezAún no hay calificaciones
- Cronograma GESISDocumento9 páginasCronograma GESISEmilio ZayagoAún no hay calificaciones
- Excel10-Formulas y Funciones01 - PlanillasDocumento12 páginasExcel10-Formulas y Funciones01 - Planillasluis gomez100% (1)
- Certificacion de Entrega - 1Documento76 páginasCertificacion de Entrega - 1luis gomezAún no hay calificaciones
- Inventario BackabDocumento62 páginasInventario Backabluis gomez100% (1)
- Milímetros A PulgadasDocumento2 páginasMilímetros A Pulgadasluis gomez100% (11)
- Check List MontacargasDocumento2 páginasCheck List Montacargasjuan cAún no hay calificaciones
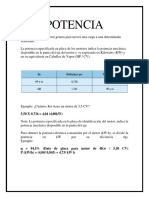
- PotenciaDocumento8 páginasPotenciaFernando PaivaAún no hay calificaciones
- Manual L INICIO FIN - America InnovaDocumento2 páginasManual L INICIO FIN - America InnovaINDUSTRIAL JUNIOAún no hay calificaciones
- TP - Comunicaciones y RedesDocumento11 páginasTP - Comunicaciones y RedesMatias ZaccaroAún no hay calificaciones
- Injection 2Documento25 páginasInjection 2Ruben C. CanaviriAún no hay calificaciones
- Cronograma Inspeccion Mantenimiento Puente GruasDocumento2 páginasCronograma Inspeccion Mantenimiento Puente GruasOrlando Orejuela LopezAún no hay calificaciones
- Catalogo Completo 12-03-28Documento41 páginasCatalogo Completo 12-03-28Antares Distribuidora de RepuestosAún no hay calificaciones
- 2009 Citroen c4 Picasso 86Documento337 páginas2009 Citroen c4 Picasso 86charaven1817Aún no hay calificaciones
- Tornero Mecánico (Scaner)Documento83 páginasTornero Mecánico (Scaner)Ricardo Vash Lázaro100% (2)
- Construyendo Una Lámpara USBDocumento5 páginasConstruyendo Una Lámpara USBAlejandro Damian Santos GonzálezAún no hay calificaciones
- Reporte Tecnico Lenovo Pf3bpeywDocumento15 páginasReporte Tecnico Lenovo Pf3bpeywJoseAún no hay calificaciones
- Kawasaki KX250FDocumento218 páginasKawasaki KX250Fmariojmb16Aún no hay calificaciones
- Lista Orlando Lpz.Documento10 páginasLista Orlando Lpz.Carlos Arturo Caviedes NogalesAún no hay calificaciones
- 3.2 Resolucion de Ejercicios MecanizacionDocumento11 páginas3.2 Resolucion de Ejercicios MecanizacionGerard Pariona ChocceAún no hay calificaciones
- 3a1760es-C Manual Road PackDocumento28 páginas3a1760es-C Manual Road Packricsy judit rojas rodriguezAún no hay calificaciones
- Manual Instalación PolichargerINDocumento22 páginasManual Instalación PolichargerINAlba Car MarAún no hay calificaciones
- 2.4. Lista de ChequeoDocumento39 páginas2.4. Lista de ChequeoDiego Sanmiguel VillacresesAún no hay calificaciones
- TransistoresDocumento60 páginasTransistoresMaicol Cruz CarrascoAún no hay calificaciones
- Esquema de Circuitos Eléctricos de La Regulación Del Motor - (MR - )Documento4 páginasEsquema de Circuitos Eléctricos de La Regulación Del Motor - (MR - )Willy Alexis Navarrete AlvaradoAún no hay calificaciones
- Ejc 3-189 Mantenimiento de Radio Prc-7330Documento89 páginasEjc 3-189 Mantenimiento de Radio Prc-7330AlfredoBelloAún no hay calificaciones
- 84 Certificarte (2022-11-11)Documento3 páginas84 Certificarte (2022-11-11)jorge LaupaAún no hay calificaciones
- Formato Uso 4x4 y DPF - PPSXDocumento15 páginasFormato Uso 4x4 y DPF - PPSXdomis007Aún no hay calificaciones
- Manual Indicador de VelocidadDocumento28 páginasManual Indicador de VelocidadJeann Ramirez GonzalezAún no hay calificaciones
- Cuaderno de Informes Semana 9Documento9 páginasCuaderno de Informes Semana 9Renzo MamaniAún no hay calificaciones
- Cuadro Comparativo ActuadoresDocumento2 páginasCuadro Comparativo ActuadoresjozaAún no hay calificaciones
- Practica de Circuito de ArranqueDocumento5 páginasPractica de Circuito de ArranqueMikhaelRodriguezAún no hay calificaciones
- Schematic MICRO-SHUNTALENT-1 2Documento1 páginaSchematic MICRO-SHUNTALENT-1 2Lalo Rodriguez MartinezAún no hay calificaciones
- PowerFlex 700S 2 480V 1150A 6.03.19Documento35 páginasPowerFlex 700S 2 480V 1150A 6.03.19Mauro Portugal LagardaAún no hay calificaciones
- Bobina de TeslaDocumento10 páginasBobina de TeslaAlejo MuñozAún no hay calificaciones