También podría gustarte
- Tarea1 ProblemasDocumento3 páginasTarea1 ProblemasEduardo Aguirre0% (2)
- PROCEDIMIENTO TENDIDO DE CABLE MEDIA 22kvDocumento9 páginasPROCEDIMIENTO TENDIDO DE CABLE MEDIA 22kvSegundo barrera100% (1)
- Matrices de Rotacion 3D TareaDocumento3 páginasMatrices de Rotacion 3D TareaEdgar Andres Cevallos Ramirez100% (1)
- Aplicacion Dinamica Del Robot Esferico 2GLDocumento17 páginasAplicacion Dinamica Del Robot Esferico 2GLKent A. ChavezAún no hay calificaciones
- Herramientas de Orientación EspacialDocumento10 páginasHerramientas de Orientación Espacialjosue infantasAún no hay calificaciones
- Tema 5 Cinematica InversaDocumento17 páginasTema 5 Cinematica InversaPEDRO ALEJANDRO MENDOZAAún no hay calificaciones
- 11 Pantalla LCD 16x02 Con I2CDocumento4 páginas11 Pantalla LCD 16x02 Con I2CDamian RamirezAún no hay calificaciones
- Control de LuminosidadDocumento3 páginasControl de LuminosidadAlex GoreAún no hay calificaciones
- Laboratorio #2 - Aplicaciones Del Algebra de BooleDocumento2 páginasLaboratorio #2 - Aplicaciones Del Algebra de Boolebladeblak1Aún no hay calificaciones
- Uso de La Transformada "Z". Cálculo Analítico y Con MatlabDocumento33 páginasUso de La Transformada "Z". Cálculo Analítico y Con MatlabVictor CondoriAún no hay calificaciones
- Solucionario Final Control Digital PDFDocumento4 páginasSolucionario Final Control Digital PDFluis angel gonzalez100% (1)
- ALCOMEX - D48 Formato Declaracion Jurada Participacion A CursosDocumento1 páginaALCOMEX - D48 Formato Declaracion Jurada Participacion A CursosSegundo barreraAún no hay calificaciones
- Dinamica RRPRDocumento40 páginasDinamica RRPREdgar Andres Cevallos RamirezAún no hay calificaciones
- Rotacion y Traslacion Con MatlabDocumento16 páginasRotacion y Traslacion Con MatlabFrancisco Javier Villate GaonaAún no hay calificaciones
- Cinematica Del Robot Laboratorio 2Documento4 páginasCinematica Del Robot Laboratorio 2Walter CastellanosAún no hay calificaciones
- Ejercicios Resultos RoboticaDocumento12 páginasEjercicios Resultos RoboticaTeddy Jhennse Negrete Peña50% (4)
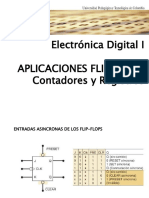
- Contadores y RegistrosDocumento32 páginasContadores y RegistrospepaAún no hay calificaciones
- Estabilidad de Sistema de Control DigitalDocumento7 páginasEstabilidad de Sistema de Control DigitalKolb JavierAún no hay calificaciones
- Transformada Z Con Matlab NataDocumento12 páginasTransformada Z Con Matlab NataNataly Ipuz PalomaAún no hay calificaciones
- Examen Parcial de Jimmy ColquehuancaDocumento6 páginasExamen Parcial de Jimmy ColquehuancaJimmy Joel ColqueAún no hay calificaciones
- Control Discreto de Motor DCDocumento6 páginasControl Discreto de Motor DCharvic3Aún no hay calificaciones
- Algebra Lineal - Ejercicio 5 y 6Documento7 páginasAlgebra Lineal - Ejercicio 5 y 6katherine suarezAún no hay calificaciones
- Cuaternios Matlab PDFDocumento8 páginasCuaternios Matlab PDFDorin AliendreAún no hay calificaciones
- Tarea 11 - Matriz - JacobianaDocumento20 páginasTarea 11 - Matriz - Jacobianacharleseli123Aún no hay calificaciones
- Práctica 10 de Control ModernoDocumento4 páginasPráctica 10 de Control ModernoTrabajos130% (1)
- Tablas FourierDocumento8 páginasTablas FourierCarlos Mario FernándezAún no hay calificaciones
- Ejercicios de Control y AutomatizacionDocumento12 páginasEjercicios de Control y AutomatizacionDiegoNavarroAún no hay calificaciones
- Planta de CaudalDocumento6 páginasPlanta de CaudalAnonymous FhO1AjeCBAún no hay calificaciones
- Uso de La Transformada "Z". Cálculo Analítico y Con MatlabDocumento20 páginasUso de La Transformada "Z". Cálculo Analítico y Con MatlabVictor CondoriAún no hay calificaciones
- Avance PDSDocumento6 páginasAvance PDSAlberto HinojosaAún no hay calificaciones
- Resolución Del Problema Cinemático Del Robot Articular de 2 Grados de LibertadDocumento11 páginasResolución Del Problema Cinemático Del Robot Articular de 2 Grados de LibertadElias Gutierrez MendozaAún no hay calificaciones
- Obtención de Trazas de Nyquist Con Matlab LalaDocumento22 páginasObtención de Trazas de Nyquist Con Matlab LalaEduardo Rojas GomezAún no hay calificaciones
- Lab Nº3 - Orientación Espacial - 2019 - ImparDocumento6 páginasLab Nº3 - Orientación Espacial - 2019 - ImparAnonymous 9PUWc98ymAún no hay calificaciones
- Cuadros Enviar Informe 2Documento13 páginasCuadros Enviar Informe 2Felipe Blair Ramírez ZamoraAún no hay calificaciones
- Informe 8 Rob IDocumento9 páginasInforme 8 Rob IAlejandro Valdivia OrtegaAún no hay calificaciones
- Aplicacion de Cinematica de Un Robot de 3 G L 40498Documento4 páginasAplicacion de Cinematica de Un Robot de 3 G L 40498SebastianD.L.T.CastañedaAún no hay calificaciones
- Introduccion - Polos - CerosDocumento10 páginasIntroduccion - Polos - CerosAlexander SolanoAún no hay calificaciones
- 11) Práctica 6 CD Robot ScaraDocumento3 páginas11) Práctica 6 CD Robot ScaraAngel Enrique F. Cruz100% (1)
- Cinemática de Brazo Manipulador de 2 GDLDocumento4 páginasCinemática de Brazo Manipulador de 2 GDLjuanillofc100% (3)
- Ángulos de EulerDocumento11 páginasÁngulos de EulerGerman RodriguezAún no hay calificaciones
- Practica1 Robotica CrespoTorricoEmanuelDocumento8 páginasPractica1 Robotica CrespoTorricoEmanuelEmanuel CrespoAún no hay calificaciones
- RoboticaDocumento3 páginasRoboticalauraAún no hay calificaciones
- Lab 1 RobóticaDocumento5 páginasLab 1 RobóticaNeheyler MecatrónicoAún no hay calificaciones
- Determinación Experimental de La Función de TransferenciaDocumento10 páginasDeterminación Experimental de La Función de TransferenciaRicardo Rodriguez BustinzaAún no hay calificaciones
- Edes Neuronales Multicapa Con Aprendizaje SupervisadoDocumento39 páginasEdes Neuronales Multicapa Con Aprendizaje SupervisadoLuis Carlos Gonzales Rengifo100% (1)
- Criterios de Estabilidad para SistemasDocumento89 páginasCriterios de Estabilidad para SistemasCarlos Fernando Escalante ArciniegasAún no hay calificaciones
- Contadores IntegradosDocumento13 páginasContadores IntegradosYulmanAún no hay calificaciones
- Dinamica Del RobotDocumento50 páginasDinamica Del RobotAlonso Limon100% (1)
- Modelado de Circuitos ElectricosDocumento30 páginasModelado de Circuitos Electricosjlola100% (1)
- Informe Filtro Pasa BajoDocumento14 páginasInforme Filtro Pasa BajoDiego MejiaAún no hay calificaciones
- Tema 4 Cinematica DirectaDocumento27 páginasTema 4 Cinematica DirectaJoseEduardoBautistaAcevedo0% (1)
- Examen Sistemas de Control DigitalDocumento6 páginasExamen Sistemas de Control DigitalPatrick Gilbert De la Cruz FloresAún no hay calificaciones
- Modelado y Simulacion - Robot 2 Grados de LibertadDocumento7 páginasModelado y Simulacion - Robot 2 Grados de LibertadLalo FrankAún no hay calificaciones
- Lab1 PROPIEDADES DE LAS SEÑALESDocumento12 páginasLab1 PROPIEDADES DE LAS SEÑALESRogel AlfaroAún no hay calificaciones
- EXAMEN PARCIALControl InteligenteDocumento9 páginasEXAMEN PARCIALControl InteligenteJheral Ramírez NavarroAún no hay calificaciones
- Guia de Teclado Matricial2Documento14 páginasGuia de Teclado Matricial2Luis Fernando Lopez RojasAún no hay calificaciones
- Matrices de Transformación Homogénea 4DDocumento6 páginasMatrices de Transformación Homogénea 4DJuan Carlos LudwigAún no hay calificaciones
- Angulos de EulerDocumento6 páginasAngulos de EulerxavierAún no hay calificaciones
- Matrices de Transformacion Homogenea PDFDocumento47 páginasMatrices de Transformacion Homogenea PDFraulAún no hay calificaciones
- Robot Motoman HP3 Calculo de Rosa Polar 3 PetalosDocumento3 páginasRobot Motoman HP3 Calculo de Rosa Polar 3 Petalosreivaj018Aún no hay calificaciones
- Gráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraDe EverandGráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraAún no hay calificaciones
- Introducción a la geometría analíticaDe EverandIntroducción a la geometría analíticaCalificación: 4 de 5 estrellas4/5 (1)
- Matrices de Transformación HomogéneaDocumento9 páginasMatrices de Transformación HomogéneaSegundo barreraAún no hay calificaciones
- Plan de Tesis de ElectronicaDocumento16 páginasPlan de Tesis de ElectronicaSegundo barreraAún no hay calificaciones
- Modelo de Brochure de Empresa de ServiciosDocumento5 páginasModelo de Brochure de Empresa de ServiciosSegundo barreraAún no hay calificaciones
- Operadores Cinematicos. MirandaDocumento53 páginasOperadores Cinematicos. Mirandahaggen90tckhotmail.comAún no hay calificaciones
- Matrices de Composición de RotacionesDocumento6 páginasMatrices de Composición de RotacionesLiioogaann GaLeyAún no hay calificaciones
- Robotica Cinematica Directa Metodo GeometricoDocumento4 páginasRobotica Cinematica Directa Metodo GeometricoLima Garcia JuanAún no hay calificaciones
- Transformaciones de Traslación y Rotación en R2Documento35 páginasTransformaciones de Traslación y Rotación en R2Jefferson Flores100% (1)
- Tarea 4Documento38 páginasTarea 4Michael ThebbesiAún no hay calificaciones
- Rotaciones CompuestasDocumento4 páginasRotaciones CompuestasMissael VegaAún no hay calificaciones
- Matrices de RotaciónDocumento19 páginasMatrices de RotaciónEdgar OrtaAún no hay calificaciones
- Tarea 1Documento3 páginasTarea 1Héctor Azcaray RiveraAún no hay calificaciones
- Ejercicios Algebra LinealDocumento1 páginaEjercicios Algebra LinealOliver MoodAún no hay calificaciones
- Matriz de Rotación para Imágenes en VisualDocumento3 páginasMatriz de Rotación para Imágenes en VisualDUVAN FERNANDO PULGARIN MARTINEZAún no hay calificaciones
- Problemas Mark Spong II Unidad Movimientos Rigidos y Tranformaciones Homogeneas PDFDocumento17 páginasProblemas Mark Spong II Unidad Movimientos Rigidos y Tranformaciones Homogeneas PDFGibranDanielReyesAún no hay calificaciones
- Lab 1 RobóticaDocumento5 páginasLab 1 RobóticaNeheyler MecatrónicoAún no hay calificaciones
- Practica 8Documento3 páginasPractica 8David Santiago AlvarezAún no hay calificaciones
- Taller 1 Robotica SolucionDocumento6 páginasTaller 1 Robotica SolucionMarcelo CartagenaAún no hay calificaciones
- Sem03 U1Documento55 páginasSem03 U1ANDRE JEAN PIERRE MACHUCA LINGANAún no hay calificaciones
- Sistema de CoordenadasDocumento8 páginasSistema de CoordenadasAXEL GABRIEL FLORES ESCUDEROAún no hay calificaciones
- Matriz de RotaciónDocumento13 páginasMatriz de RotaciónFelipe Rivera0% (1)
- 4 - Posicion y Orientacion PDFDocumento29 páginas4 - Posicion y Orientacion PDFJaime Enrique Arango CastroAún no hay calificaciones
- Movimiento Rígido y Transformaciones Homogéneas - 17041177 PDFDocumento15 páginasMovimiento Rígido y Transformaciones Homogéneas - 17041177 PDFEdgar MorenoAún no hay calificaciones
- Tema 3 Herramientas MatematicasDocumento198 páginasTema 3 Herramientas MatematicasSamuel Eduardo Jimenez SantafeAún no hay calificaciones
- UNIDAD 02 Ejercicios Robotica I ExtDocumento11 páginasUNIDAD 02 Ejercicios Robotica I ExtPablo DuqueAún no hay calificaciones
- Robot MATRIZ DE ROTACIONDocumento64 páginasRobot MATRIZ DE ROTACIONFernando GarciaAún no hay calificaciones
- Unidad 2 GraficacionDocumento17 páginasUnidad 2 GraficacionChristian Ocaña RoblesAún no hay calificaciones
- Matriz de Rotación - Es - Gaz - WikiDocumento22 páginasMatriz de Rotación - Es - Gaz - Wikiroberto lópezAún no hay calificaciones
- Sistemas de Coordenadas TerrestresDocumento24 páginasSistemas de Coordenadas TerrestresSebastián ThompsonAún no hay calificaciones
- Transformaciones EspacialesDocumento33 páginasTransformaciones EspacialesrobertoAún no hay calificaciones
- Algebra Lineal Serie5Documento2 páginasAlgebra Lineal Serie5AxelAún no hay calificaciones
- ClaseREPASO Temas 1 2 3 Resultados-2Documento66 páginasClaseREPASO Temas 1 2 3 Resultados-2Jean Carlos Barragan VillaAún no hay calificaciones
- Tarea 1 RoboticaDocumento5 páginasTarea 1 Roboticawanchope drogbaAún no hay calificaciones