También podría gustarte
- La Moda en La Edad AntiguaDocumento19 páginasLa Moda en La Edad AntiguaGy William Em Cy100% (1)
- Bomba de Inyecion Lineal DIESELDocumento17 páginasBomba de Inyecion Lineal DIESELOlman Sandoval100% (1)
- Pluviales 2023 ADocumento67 páginasPluviales 2023 ADiego DiazAún no hay calificaciones
- Actividad 3.2 Secuencia de Timers y ContadoresDocumento14 páginasActividad 3.2 Secuencia de Timers y ContadoresEdgar DelgadoAún no hay calificaciones
- Práctica #3 Timer y Contador en PLC NanoDocumento10 páginasPráctica #3 Timer y Contador en PLC NanoEdgar DelgadoAún no hay calificaciones
- 2.2 Tarea #2 Simulación de Secuencia de PistonesDocumento7 páginas2.2 Tarea #2 Simulación de Secuencia de PistonesEdgar DelgadoAún no hay calificaciones
- Práctica 3.1 Manejo Básico de Timers y ContadoresDocumento11 páginasPráctica 3.1 Manejo Básico de Timers y ContadoresEdgar DelgadoAún no hay calificaciones
- 2.1 Tarea #1 Manejo Básico de PLC NANODocumento3 páginas2.1 Tarea #1 Manejo Básico de PLC NANOEdgar DelgadoAún no hay calificaciones
- Resumen "Modelos y Técnicas de Análisis para La Toma de Decisiones"Documento13 páginasResumen "Modelos y Técnicas de Análisis para La Toma de Decisiones"Edgar DelgadoAún no hay calificaciones
- Ensayo "Habilidad para Plantear Problemas"Documento6 páginasEnsayo "Habilidad para Plantear Problemas"Edgar DelgadoAún no hay calificaciones
- Glosario "Gestión Empresarial y Liderazgo"Documento3 páginasGlosario "Gestión Empresarial y Liderazgo"Edgar DelgadoAún no hay calificaciones
- Resumen "Análisis de Video: Como Tomar Buenas Desiciones"Documento7 páginasResumen "Análisis de Video: Como Tomar Buenas Desiciones"Edgar Delgado100% (1)
- Actividad 2.1Documento11 páginasActividad 2.1Edgar DelgadoAún no hay calificaciones
- Actividad 1.2Documento21 páginasActividad 1.2Edgar DelgadoAún no hay calificaciones
- Actividad 1.1Documento4 páginasActividad 1.1Edgar DelgadoAún no hay calificaciones
- Actividad 1.3Documento17 páginasActividad 1.3Edgar DelgadoAún no hay calificaciones
- Ciclo de Carnot y Tipos de CalderasDocumento25 páginasCiclo de Carnot y Tipos de CalderasEdgar DelgadoAún no hay calificaciones
- La EmplresaDocumento2 páginasLa EmplresaJosé Cristino SAKA ESORAAún no hay calificaciones
- PASAPORTEDocumento8 páginasPASAPORTEEduardo LemusAún no hay calificaciones
- Administración de Cuentas Por CobrarDocumento20 páginasAdministración de Cuentas Por CobrarSusana Terrazo Lopez100% (1)
- Presupuesto Instalaciones ElectricasDocumento4 páginasPresupuesto Instalaciones ElectricasArmando GutierrezAún no hay calificaciones
- LIC191Documento60 páginasLIC191Ignacio MarínAún no hay calificaciones
- GTC 45 2019Documento1 páginaGTC 45 2019Shadia GalvanAún no hay calificaciones
- Worksheet - A1 - EdA 6 - Activity 1 Santos AlbornozDocumento2 páginasWorksheet - A1 - EdA 6 - Activity 1 Santos AlbornozMaria SantosAún no hay calificaciones
- Examen 1 Bimestre BiologiaDocumento4 páginasExamen 1 Bimestre BiologiaBrigitte cruz balbuenaAún no hay calificaciones
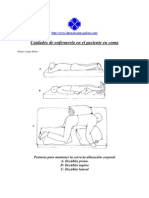
- Cuidados de Enfermería en El Paciente en ComaDocumento15 páginasCuidados de Enfermería en El Paciente en ComaJavier Alcazar50% (2)
- Hoja de RespuestaDocumento1 páginaHoja de Respuestaveronica natalia herreraAún no hay calificaciones
- Fi 19496639 3 1371 28 07 2021Documento1 páginaFi 19496639 3 1371 28 07 2021mauricio carrascoAún no hay calificaciones
- SUNASSDocumento21 páginasSUNASSSOL YOMIRA SEGOVIA SOTOAún no hay calificaciones
- Control de Cucharas CarahuacraDocumento7 páginasControl de Cucharas CarahuacraJorge Luis Avila RodriguezAún no hay calificaciones
- Transporte de Tornillo FlexibleDocumento2 páginasTransporte de Tornillo FlexibleAbdulCainAún no hay calificaciones
- El Vendedor Más Grande Del Mundo PDFDocumento35 páginasEl Vendedor Más Grande Del Mundo PDFavefenix85Aún no hay calificaciones
- Almacenamiento de MercanciasDocumento7 páginasAlmacenamiento de MercanciasJherson Leiva RafaelAún no hay calificaciones
- Informe No.5 de MicroDocumento7 páginasInforme No.5 de MicroMaverick NatarenoAún no hay calificaciones
- Ee Cobach 403Documento7 páginasEe Cobach 403Macías Cervantes Paola ShirelAún no hay calificaciones
- Estudio de Tiempos - Grúa PuenteDocumento9 páginasEstudio de Tiempos - Grúa PuentemantenimientolanuezsrlAún no hay calificaciones
- HC NeurocirugiaDocumento8 páginasHC NeurocirugiaAlezita AccostaAún no hay calificaciones
- Aneurisma ResumenDocumento2 páginasAneurisma Resumenvickktor wongAún no hay calificaciones
- Semana 5 Trabajo Colaborativo Algebra LinealDocumento4 páginasSemana 5 Trabajo Colaborativo Algebra LinealRicardo PucciniAún no hay calificaciones
- EconomiaDocumento8 páginasEconomiaByron RolandoAún no hay calificaciones
- Guion para La Conformación de Un Artículo CientíficoDocumento5 páginasGuion para La Conformación de Un Artículo CientíficofernandoAún no hay calificaciones
- Como Saber Que Grupo Electrógeno NecesitoDocumento4 páginasComo Saber Que Grupo Electrógeno NecesitoLuis MezaAún no hay calificaciones
- Ciencias 2Documento4 páginasCiencias 2LordDreamAún no hay calificaciones
- Tecno-Hogar Boleita 01-03-2022Documento30 páginasTecno-Hogar Boleita 01-03-2022arquimedes fuentesAún no hay calificaciones