También podría gustarte
- El Color en El Arte Mexicano Georges Roque.Documento156 páginasEl Color en El Arte Mexicano Georges Roque.Chapis Yeyetzii75% (4)
- Reporte - Caja Fuerte-ArduinoDocumento12 páginasReporte - Caja Fuerte-ArduinoRodrigoVallejoM50% (2)
- Control de Carro Robot vía BluetoothDocumento12 páginasControl de Carro Robot vía BluetoothYefrin PachecoAún no hay calificaciones
- Actividad 6. Proyecto de Uso de Motores EléctricosDocumento5 páginasActividad 6. Proyecto de Uso de Motores Eléctricosjesusmdelgado000Aún no hay calificaciones
- Practicas ServomotorDocumento15 páginasPracticas ServomotorEdgar Ubaldo Correa GrandeAún no hay calificaciones
- Sistemas DigitalesDocumento22 páginasSistemas DigitalesYosselyn CastroAún no hay calificaciones
- Laboratorio MovilDocumento10 páginasLaboratorio MovilJuan Diego Marin RodriguezAún no hay calificaciones
- 00 Instructivo Clase 4Documento12 páginas00 Instructivo Clase 4Ariel edson Garcia yugarAún no hay calificaciones
- Guia de Ejercicios Arduino para El Control de E-S Digitales y MotoresDocumento12 páginasGuia de Ejercicios Arduino para El Control de E-S Digitales y MotoresRonald Eduardo Urbina EsquivelAún no hay calificaciones
- Proyecto No 4 Controlar 2 Servomotores de 0o A 180o Con 1 JoystickDocumento6 páginasProyecto No 4 Controlar 2 Servomotores de 0o A 180o Con 1 JoystickDomingo ArroyoAún no hay calificaciones
- ARIEL HOMERO CHAVEZ AGUILAR ELMs PDFDocumento6 páginasARIEL HOMERO CHAVEZ AGUILAR ELMs PDFAriel ChavezAún no hay calificaciones
- Arduino Robot Car Wireless Control Utilizando HCDocumento37 páginasArduino Robot Car Wireless Control Utilizando HCPier DanAún no hay calificaciones
- Microprocesadores Practica 5Documento10 páginasMicroprocesadores Practica 5Lizette BlueAún no hay calificaciones
- Reporte de Seguidor de LineaDocumento10 páginasReporte de Seguidor de LineaRaymond KenneyAún no hay calificaciones
- Proyecto Aplicaci NDocumento16 páginasProyecto Aplicaci NWerner Vega AscuňaAún no hay calificaciones
- Práctica No 8-CIDI-IDocumento10 páginasPráctica No 8-CIDI-IJuan CarlosAún no hay calificaciones
- Brazo Robotico Labview ArduinoDocumento17 páginasBrazo Robotico Labview ArduinoAdry CamachoAún no hay calificaciones
- Servomotor Con Arduino Tutorial de Programación Paso A PasoDocumento16 páginasServomotor Con Arduino Tutorial de Programación Paso A PasoLuis Angel BravoAún no hay calificaciones
- Documento AudrinoDocumento30 páginasDocumento AudrinoEthel HaihtAún no hay calificaciones
- Informe - Carro Arduino - FinalDocumento22 páginasInforme - Carro Arduino - FinalDahyana Uribe Cortes50% (2)
- Practica Nro 7Documento5 páginasPractica Nro 7Ronald ContrerasAún no hay calificaciones
- Arduino TutorialesDocumento18 páginasArduino Tutorialesmariohc100% (1)
- Tarea Final Segundo Parcial-AriasDocumento13 páginasTarea Final Segundo Parcial-AriasStalin AriasAún no hay calificaciones
- Actividad6 - Robot de BrazoDocumento7 páginasActividad6 - Robot de BrazoponismuchoponisAún no hay calificaciones
- Servo Con PotDocumento4 páginasServo Con PotAlandelaRosaAún no hay calificaciones
- Primeros pasos con ArduinoDocumento6 páginasPrimeros pasos con ArduinoWilzon ChambiAún no hay calificaciones
- Codigos ArduinoDocumento14 páginasCodigos ArduinoWillbert NungarayAún no hay calificaciones
- Burgasi Carvajal Espin Freire PaezDocumento17 páginasBurgasi Carvajal Espin Freire PaezJonathan FalconAún no hay calificaciones
- Proyecto No 3 Controlar Un ServomotorDocumento7 páginasProyecto No 3 Controlar Un ServomotorDomingo ArroyoAún no hay calificaciones
- Domotica Con Arduino Wifi y AndroidDocumento8 páginasDomotica Con Arduino Wifi y AndroidLuipAún no hay calificaciones
- Proyecto FinalDocumento20 páginasProyecto Finalepepe5653Aún no hay calificaciones
- Arduino Rover Controlado Por Bluetooth en Android Con VirtuinoDocumento12 páginasArduino Rover Controlado Por Bluetooth en Android Con VirtuinoPierDonneeAún no hay calificaciones
- Servomotor TutorialDocumento9 páginasServomotor TutorialDaries DctAún no hay calificaciones
- Manual CricketDocumento8 páginasManual Cricketcristian curiel camargoAún no hay calificaciones
- Practica 13 Report eDocumento13 páginasPractica 13 Report eAlbert GeorgeAún no hay calificaciones
- Practica 7. Cambio de Velocidad de Un Servomotor Sin PotenciometroDocumento5 páginasPractica 7. Cambio de Velocidad de Un Servomotor Sin PotenciometroAstrid Carolina Díaz GonzálezAún no hay calificaciones
- Comunicación Virtual COMDocumento7 páginasComunicación Virtual COMMoises MartinezAún no hay calificaciones
- Implementación de robots con ArduinoDocumento63 páginasImplementación de robots con ArduinoLuis C Rojas E100% (7)
- Guialab2 Eva2 Cidi02Documento6 páginasGuialab2 Eva2 Cidi02Armando OrellanaAún no hay calificaciones
- Proyecto Final ArduinoDocumento21 páginasProyecto Final Arduinomoisesarias877Aún no hay calificaciones
- Copia de RADAR ARDUINODocumento6 páginasCopia de RADAR ARDUINOShannon BryantAún no hay calificaciones
- Reporte Brazo Robotico BluetoothDocumento7 páginasReporte Brazo Robotico BluetoothVictor Amaurys PerezAún no hay calificaciones
- Tutorial de Comunicaciones WIFI Con ESP8266 - Lua y Cayenne - Tutojavi - ESP8266 - OIT PDFDocumento24 páginasTutorial de Comunicaciones WIFI Con ESP8266 - Lua y Cayenne - Tutojavi - ESP8266 - OIT PDFprofejaviercAún no hay calificaciones
- Mini SumoDocumento12 páginasMini Sumopedro alonzoAún no hay calificaciones
- Mini SumoDocumento12 páginasMini Sumopedro alonzoAún no hay calificaciones
- Arduino Traffic LightDocumento7 páginasArduino Traffic LightsrattovAún no hay calificaciones
- Tri-Carevita ObstaculosDocumento87 páginasTri-Carevita ObstaculosHector VallejosAún no hay calificaciones
- Feria de Ciencias 2Documento8 páginasFeria de Ciencias 2Daniela Fernanda Marquez FernandezAún no hay calificaciones
- Vehículo A Control RemotoDocumento12 páginasVehículo A Control RemotoElvisAún no hay calificaciones
- Practica No 5Documento20 páginasPractica No 5domingoAún no hay calificaciones
- Girasol Seguidor de LuzDocumento5 páginasGirasol Seguidor de LuzAndres WedemeyerAún no hay calificaciones
- Robot Evita Obstaculos.Documento12 páginasRobot Evita Obstaculos.Berenice SunemAún no hay calificaciones
- Como Simular Arduino en ProteusDocumento24 páginasComo Simular Arduino en ProteusMario Calderon100% (1)
- Manejo de actuadores y LCD con ArduinoDocumento15 páginasManejo de actuadores y LCD con ArduinoDennys Fernando CoralAún no hay calificaciones
- Informe Aboo FinalDocumento9 páginasInforme Aboo FinalAlexandra Castro ValenciaAún no hay calificaciones
- Informe de CubeSatDocumento10 páginasInforme de CubeSatMiguel ValdebenitoAún no hay calificaciones
- Arduino Matlab Simulink Controlador PID PDFDocumento19 páginasArduino Matlab Simulink Controlador PID PDFaleixo ederAún no hay calificaciones
- Informe Laboratorio 7 Mic600Documento7 páginasInforme Laboratorio 7 Mic600Jose Ubaldo Cantuta Zuazo100% (1)
- Proyecto Arduino - Coche Bluetooth - PDF - Editado2Documento12 páginasProyecto Arduino - Coche Bluetooth - PDF - Editado2Ivan Gavilan SotoAún no hay calificaciones
- Exposición de Arduino - 2Documento15 páginasExposición de Arduino - 2ego220106Aún no hay calificaciones
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109De EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Aún no hay calificaciones
- Puertas Isometrico-Sin CortinaDocumento1 páginaPuertas Isometrico-Sin CortinaAlan David Rojo HernandezAún no hay calificaciones
- Caso de Aplicacion Del Metodo Taguchi en PDFDocumento12 páginasCaso de Aplicacion Del Metodo Taguchi en PDFManuel Maturana RamosAún no hay calificaciones
- Instalación eléctrica general proyecto normasDocumento1 páginaInstalación eléctrica general proyecto normasAlan David Rojo HernandezAún no hay calificaciones
- LAY OUT GENERAL 2018 - FABRICA CAFES - Ultima Versión - Recover-Layout3Documento1 páginaLAY OUT GENERAL 2018 - FABRICA CAFES - Ultima Versión - Recover-Layout3Alan David Rojo HernandezAún no hay calificaciones
- Rutas de Canalización Egron-Hoja 2Documento1 páginaRutas de Canalización Egron-Hoja 2Alan David Rojo HernandezAún no hay calificaciones
- Puertas Isometrico-Con CortinaDocumento1 páginaPuertas Isometrico-Con CortinaAlan David Rojo HernandezAún no hay calificaciones
- Rutas de Canalización Extraccion-Hoja 1Documento1 páginaRutas de Canalización Extraccion-Hoja 1Alan David Rojo HernandezAún no hay calificaciones
- Rutas de Canalización Extraccion-Hoja 2Documento1 páginaRutas de Canalización Extraccion-Hoja 2Alan David Rojo HernandezAún no hay calificaciones
- Puertas Isometrico-Layout1Documento1 páginaPuertas Isometrico-Layout1Alan David Rojo HernandezAún no hay calificaciones
- 1 de 4Documento1 página1 de 4Alan David Rojo HernandezAún no hay calificaciones
- Coffee Husk ReprocessionDocumento1 páginaCoffee Husk ReprocessionAlan David Rojo HernandezAún no hay calificaciones
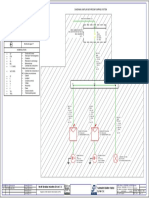
- DIAGRAMA UNIFILAR Bombas - Propuesta 1 (Subestacion)Documento1 páginaDIAGRAMA UNIFILAR Bombas - Propuesta 1 (Subestacion)Alan David Rojo HernandezAún no hay calificaciones
- ITM-Bomba agua 1FDocumento1 páginaITM-Bomba agua 1FAlan David Rojo HernandezAún no hay calificaciones
- Bombas de Oficinas Pac Dti CalderaDocumento1 páginaBombas de Oficinas Pac Dti CalderaAlan David Rojo HernandezAún no hay calificaciones
- 3 de 4Documento1 página3 de 4Alan David Rojo HernandezAún no hay calificaciones
- RespaydeDocumento8 páginasRespaydeAlan David Rojo HernandezAún no hay calificaciones
- 4 de 4Documento1 página4 de 4Alan David Rojo HernandezAún no hay calificaciones
- Mapa MenDocumento3 páginasMapa MenAlan David Rojo HernandezAún no hay calificaciones
- Instalación eléctrica y de control generalDocumento1 páginaInstalación eléctrica y de control generalAlan David Rojo HernandezAún no hay calificaciones
- Instalación eléctrica y de control generalDocumento1 páginaInstalación eléctrica y de control generalAlan David Rojo HernandezAún no hay calificaciones
- Instalación eléctrica y de control generalDocumento1 páginaInstalación eléctrica y de control generalAlan David Rojo HernandezAún no hay calificaciones
- Instalación eléctrica y de control generalDocumento1 páginaInstalación eléctrica y de control generalAlan David Rojo HernandezAún no hay calificaciones
- Pac Bathroom Pumping System-BaseDocumento1 páginaPac Bathroom Pumping System-BaseAlan David Rojo HernandezAún no hay calificaciones
- Instalación eléctrica y de control generalDocumento1 páginaInstalación eléctrica y de control generalAlan David Rojo HernandezAún no hay calificaciones
- Administracion de Personal 240721Documento5 páginasAdministracion de Personal 240721Alan David Rojo HernandezAún no hay calificaciones
- Arq-Generales PB Pa-02-Planta AltaDocumento1 páginaArq-Generales PB Pa-02-Planta AltaAlan David Rojo HernandezAún no hay calificaciones
- HOEEDocumento2 páginasHOEEAlan David Rojo HernandezAún no hay calificaciones
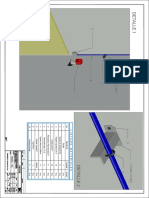
- Pac Bathroom Pumping System-IsometricoDocumento1 páginaPac Bathroom Pumping System-IsometricoAlan David Rojo HernandezAún no hay calificaciones
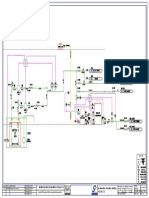
- Dti Sistema de Bombas PacDocumento1 páginaDti Sistema de Bombas PacAlan David Rojo HernandezAún no hay calificaciones
- Esd y EmiDocumento1 páginaEsd y EmiGerman MendietaAún no hay calificaciones
- RevistaTecnologicaFinal DigitalDocumento76 páginasRevistaTecnologicaFinal DigitalGuillermo MurguiaAún no hay calificaciones
- Introduccion de EXPLORACION de SUELOS - Búsqueda de GoogleDocumento4 páginasIntroduccion de EXPLORACION de SUELOS - Búsqueda de GoogleTODO INGLES ARCHIVOS 1000Aún no hay calificaciones
- Bts Smart-Analyzer 1112esDocumento2 páginasBts Smart-Analyzer 1112esHarold David Villacís0% (1)
- DS 1010 (SQL) DataServiceGuide EsDocumento118 páginasDS 1010 (SQL) DataServiceGuide EsJulioEstradaAún no hay calificaciones
- Apuntes PythonDocumento142 páginasApuntes PythonSandra Tapia PadinAún no hay calificaciones
- Qué Son y para Qué Sirven Los Software de LecturaDocumento2 páginasQué Son y para Qué Sirven Los Software de LecturaLecturaVelozCGAún no hay calificaciones
- Mantenimiento Industrial PDFDocumento112 páginasMantenimiento Industrial PDFCarlosLasluisaAún no hay calificaciones
- Reporte Anual 2017 Final FinanzasDocumento196 páginasReporte Anual 2017 Final FinanzasKEVINAún no hay calificaciones
- Alicia BanuelosDocumento44 páginasAlicia BanueloslalunaesmilugarAún no hay calificaciones
- Examen Bases de Datos Semana 1 RevisiónDocumento3 páginasExamen Bases de Datos Semana 1 RevisiónBrandon MatosAún no hay calificaciones
- AIR-ELE-003 Distribuci N de Fuerza en MTDocumento1 páginaAIR-ELE-003 Distribuci N de Fuerza en MTAnahi OsorioAún no hay calificaciones
- Informática PNADocumento31 páginasInformática PNAIvan MenesAún no hay calificaciones
- Seguridad Informatica Guia RapidaDocumento3 páginasSeguridad Informatica Guia RapidaChristian Arrieu EngelAún no hay calificaciones
- Diferentes Tipos de VPNDocumento14 páginasDiferentes Tipos de VPNmarceloAún no hay calificaciones
- MODULO 1 Arquitectura y Estructura Logica Del ProcesadorDocumento14 páginasMODULO 1 Arquitectura y Estructura Logica Del ProcesadorFrancisco HernándezAún no hay calificaciones
- Informe Tecnico Interruptor BTDocumento2 páginasInforme Tecnico Interruptor BTJuan Delgado MunozAún no hay calificaciones
- FloriculturaDocumento13 páginasFloriculturaSantiago Silva Diaz100% (1)
- Elme Seat Cordoba 95-99Documento1 páginaElme Seat Cordoba 95-99carlos martinezAún no hay calificaciones
- Analisis de AlgoritmosDocumento2 páginasAnalisis de AlgoritmosAlfredo Jorquera GonzalesAún no hay calificaciones
- Maquinas Herramienta y CNCDocumento10 páginasMaquinas Herramienta y CNCPaulina RodriguezAún no hay calificaciones
- Contactos eléctricos fracc. Brisas del CarrizalDocumento1 páginaContactos eléctricos fracc. Brisas del CarrizalJose Aguilera TorresAún no hay calificaciones
- Compra de baterías para vehículos terrestres OCAM-2021-1296-47-1Documento2 páginasCompra de baterías para vehículos terrestres OCAM-2021-1296-47-1Paul H. Departamento de VentasAún no hay calificaciones
- Brochure KL ActualDocumento22 páginasBrochure KL ActualAbelardo Navarro CanchariAún no hay calificaciones
- Circuito Con RealimentaciónDocumento9 páginasCircuito Con RealimentaciónWilliam Cun RuizAún no hay calificaciones
- Bancos de capacitores para redes de distribuciónDocumento5 páginasBancos de capacitores para redes de distribucióngermn rodriguezAún no hay calificaciones
- Preoperacional CanguroDocumento3 páginasPreoperacional CanguroVero ZapataAún no hay calificaciones
- Unidad 5 Evaluacion y Desempeno 5.1. MetDocumento7 páginasUnidad 5 Evaluacion y Desempeno 5.1. MetBrian MartinezAún no hay calificaciones
- Contextualización Del Latifundio en La Venezuela ActualDocumento6 páginasContextualización Del Latifundio en La Venezuela Actualstefanie1710Aún no hay calificaciones