También podría gustarte
- 05 Deep Learning v2Documento80 páginas05 Deep Learning v2Scarllet Osuna TostadoAún no hay calificaciones
- Planificación de Trayectorias para El Control Autónomo de Un Cuadricóptero Utilizando Técnicas de Visión Artificial y Aprendizaje ProfundoDocumento134 páginasPlanificación de Trayectorias para El Control Autónomo de Un Cuadricóptero Utilizando Técnicas de Visión Artificial y Aprendizaje ProfundoScarllet Osuna TostadoAún no hay calificaciones
- Lsgonzález TFG Ic 2021Documento79 páginasLsgonzález TFG Ic 2021Scarllet Osuna TostadoAún no hay calificaciones
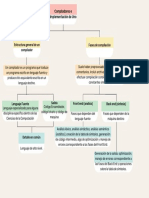
- Mapa Conceptual Sobre Compiladores e Implementación de UnoDocumento1 páginaMapa Conceptual Sobre Compiladores e Implementación de UnoScarllet Osuna TostadoAún no hay calificaciones
- Tarea 2Documento1 páginaTarea 2Scarllet Osuna TostadoAún no hay calificaciones
- T1 - Edo Actual MecatrónicaDocumento11 páginasT1 - Edo Actual MecatrónicaScarllet Osuna TostadoAún no hay calificaciones
- Mapa Conceptual Sobre Desarrollo de SistemasDocumento3 páginasMapa Conceptual Sobre Desarrollo de SistemasScarllet Osuna TostadoAún no hay calificaciones
- t1 - Actualización de RobotsDocumento6 páginast1 - Actualización de RobotsScarllet Osuna TostadoAún no hay calificaciones
- T2 - Lista de CotejoDocumento1 páginaT2 - Lista de CotejoScarllet Osuna TostadoAún no hay calificaciones
- Control DigitalDocumento17 páginasControl DigitalScarllet Osuna TostadoAún no hay calificaciones
- Tarea2 A U1 EspecificacionesDocumento1 páginaTarea2 A U1 EspecificacionesScarllet Osuna TostadoAún no hay calificaciones
- T3 - Desglose de ComponentesDocumento7 páginasT3 - Desglose de ComponentesScarllet Osuna TostadoAún no hay calificaciones
- Maqueta - Lista de CotejoDocumento1 páginaMaqueta - Lista de CotejoScarllet Osuna TostadoAún no hay calificaciones
- Maqueta de Un Manipulador RobóticoDocumento6 páginasMaqueta de Un Manipulador RobóticoScarllet Osuna TostadoAún no hay calificaciones
- T2 - Especificaciones de RobotsDocumento4 páginasT2 - Especificaciones de RobotsScarllet Osuna TostadoAún no hay calificaciones
- T2 - Especificaciones de RobotsDocumento4 páginasT2 - Especificaciones de RobotsScarllet Osuna TostadoAún no hay calificaciones
- Maqueta Manipulador RobóticoDocumento1 páginaMaqueta Manipulador RobóticoScarllet Osuna TostadoAún no hay calificaciones
- Transmisores de NivelDocumento8 páginasTransmisores de NivelLevan Avalos CastilloAún no hay calificaciones
- QMobile Es PDFDocumento8 páginasQMobile Es PDFYamil CastilloAún no hay calificaciones
- 930E-4 1 Palanca de LevanteDocumento31 páginas930E-4 1 Palanca de LevanteJERKENSON ALDO TITO TITOAún no hay calificaciones
- Invernadero InteligenteDocumento66 páginasInvernadero Inteligentecazalesdavid91% (22)
- ES Guía Rápida SHLD1 Contenedor de Protección de Fuente RadiactivaDocumento32 páginasES Guía Rápida SHLD1 Contenedor de Protección de Fuente RadiactivaPABLO BENJAMÍN CÉSPEDES FUENTESAún no hay calificaciones
- Sensores para RobotsDocumento20 páginasSensores para Robotsingeniero genaroAún no hay calificaciones
- PRACTICA10MYNFDocumento10 páginasPRACTICA10MYNFangel6m2hAún no hay calificaciones
- Stf-6 - Cajas de Cambio Manuales AutomatizadasDocumento56 páginasStf-6 - Cajas de Cambio Manuales AutomatizadasIvan Bayo PeronaAún no hay calificaciones
- Paper CoheteDocumento12 páginasPaper CoheteLUISA FERNANDA MONICO MUÑOZAún no hay calificaciones
- Valvula Duplex PDFDocumento6 páginasValvula Duplex PDFJairo PuertoAún no hay calificaciones
- Operating Instructions CP35MHT80Documento20 páginasOperating Instructions CP35MHT80Fer TotoAún no hay calificaciones
- Curso Motor ISMDocumento52 páginasCurso Motor ISMYoel KuNoaAún no hay calificaciones
- Full Gauge MT-516 161Documento5 páginasFull Gauge MT-516 161Jose PerezAún no hay calificaciones
- Examenparcial Unac 2020 IDocumento6 páginasExamenparcial Unac 2020 IManuel Alexis Santillana Garabito100% (1)
- Trabajo Analisis de Codigos de FallaDocumento7 páginasTrabajo Analisis de Codigos de FallaDaniel GomezAún no hay calificaciones
- Selección de SensoresDocumento6 páginasSelección de SensoresFranco Dennis CatataAún no hay calificaciones
- Extra - Practico - Sensores y ActuadoresDocumento7 páginasExtra - Practico - Sensores y ActuadoresDaniel Alaniz ReyesAún no hay calificaciones
- Lab 05 Sensores Industriales de Temperatura PresionDocumento5 páginasLab 05 Sensores Industriales de Temperatura PresionJoséMiguelEscobedoDelgadoAún no hay calificaciones
- Clase 8 Introduccion A Instrumentacion de ControlDocumento26 páginasClase 8 Introduccion A Instrumentacion de ControlBraulio ala andiaAún no hay calificaciones
- Silabo DomoticaDocumento6 páginasSilabo DomoticaJulio OblitasAún no hay calificaciones
- Contenido Control de MaquinasDocumento8 páginasContenido Control de MaquinasEfraín de la CruzAún no hay calificaciones
- ASTM-D-4695-03-en-es OF PDFDocumento6 páginasASTM-D-4695-03-en-es OF PDFAnonymous 2MchMd97SdAún no hay calificaciones
- Finales de CarreraDocumento15 páginasFinales de CarreraFrancisco VargasAún no hay calificaciones
- LAB2Documento6 páginasLAB2Andrés Adair PalaciosAún no hay calificaciones
- DL 2314 (PCT) SpaDocumento190 páginasDL 2314 (PCT) Spacrazysergio100% (2)
- Sensores Resistivos 2Documento79 páginasSensores Resistivos 2Edicson Jose Niño DiazAún no hay calificaciones
- Catálogo Sensores de FlujoDocumento16 páginasCatálogo Sensores de FlujoIcos Sensores para LíquidosAún no hay calificaciones
- Práctica 1 ControlDocumento2 páginasPráctica 1 ControlDaniel Armando LopezAún no hay calificaciones
- Sonido ImportDocumento52 páginasSonido ImportPedro Eliodoro Moscoso PadillaAún no hay calificaciones
- Informe Planta Temperatura - Sistemas DinamicosDocumento11 páginasInforme Planta Temperatura - Sistemas DinamicosAntonio Marin RuizAún no hay calificaciones
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressDe EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressCalificación: 5 de 5 estrellas5/5 (1)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.De EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Calificación: 5 de 5 estrellas5/5 (1)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- El Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenDe EverandEl Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenCalificación: 5 de 5 estrellas5/5 (8)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosDe EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosCalificación: 4 de 5 estrellas4/5 (16)
- Radiocomunicaciones: Teoría y principiosDe EverandRadiocomunicaciones: Teoría y principiosCalificación: 5 de 5 estrellas5/5 (3)
- Python Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREDe EverandPython Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWARECalificación: 4 de 5 estrellas4/5 (13)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- Conquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesDe EverandConquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Cultura y clima: fundamentos para el cambio en la organizaciónDe EverandCultura y clima: fundamentos para el cambio en la organizaciónAún no hay calificaciones
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Python Deep Learning: Introducción práctica con Keras y TensorFlow 2De EverandPython Deep Learning: Introducción práctica con Keras y TensorFlow 2Calificación: 3.5 de 5 estrellas3.5/5 (5)
- Agile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanDe EverandAgile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanCalificación: 5 de 5 estrellas5/5 (1)