También podría gustarte
- Instrumentación de ProcesosDocumento10 páginasInstrumentación de ProcesosIsmael MinchalaAún no hay calificaciones
- Assembler y C Con ATMEGA 2560Documento14 páginasAssembler y C Con ATMEGA 2560diedroidAún no hay calificaciones
- Proyecto de Graduacion - PLCDocumento94 páginasProyecto de Graduacion - PLCMarco Cano TorresAún no hay calificaciones
- Informe Practica2Documento17 páginasInforme Practica2Adriano NavarroAún no hay calificaciones
- El Control Digital en La IndustriaDocumento8 páginasEl Control Digital en La IndustriaJuan GalvesAún no hay calificaciones
- El Control Difuso de Temperatura de Una IncubadoraDocumento6 páginasEl Control Difuso de Temperatura de Una IncubadoraalexisltgaAún no hay calificaciones
- Corrimiento DireccionadoDocumento11 páginasCorrimiento DireccionadoVik ValenAún no hay calificaciones
- Informe N°1 Instrumentación de Procesos II Felipe Espinoza - Diego Vargas - Felipe VilchesDocumento12 páginasInforme N°1 Instrumentación de Procesos II Felipe Espinoza - Diego Vargas - Felipe VilchesFelipe VilchesAún no hay calificaciones
- Automatización de Transportadora de MaletaDocumento29 páginasAutomatización de Transportadora de MaletaCristhian Garcia Lopez100% (2)
- PID - Caudal - TKNIKA - ACTIVIDAD 5.2. - Regulaci - N de Caudal (PR - Ctica)Documento26 páginasPID - Caudal - TKNIKA - ACTIVIDAD 5.2. - Regulaci - N de Caudal (PR - Ctica)scribduqueAún no hay calificaciones
- Sistema de Control Automatico ProyectoDocumento18 páginasSistema de Control Automatico ProyectoFabian Camacho50% (2)
- Integración de Sistemas AutomaticosDocumento24 páginasIntegración de Sistemas AutomaticosSmuert Poot VazquezAún no hay calificaciones
- CUESTIONARIO FINAL Circuitos ElectronicosDocumento8 páginasCUESTIONARIO FINAL Circuitos ElectronicosBrayan Coyuri LopezAún no hay calificaciones
- Informe Final de Proyecto MicroprocesadorDocumento21 páginasInforme Final de Proyecto MicroprocesadorJordan Moncada TaboadaAún no hay calificaciones
- PidDocumento11 páginasPidGustavo SanchezAún no hay calificaciones
- Guia 7Documento15 páginasGuia 7FabianBañoAún no hay calificaciones
- PID DiscretizadoDocumento7 páginasPID DiscretizadoArmando UribeAún no hay calificaciones
- Esp32 PWM LedDocumento5 páginasEsp32 PWM LedAngel AlvarezAún no hay calificaciones
- Posible Informe 4Documento14 páginasPosible Informe 4valentronicaAún no hay calificaciones
- Informe de Laboratorio 2-Modelamiento-Tarejta STM32 - Sebastian PuertaDocumento14 páginasInforme de Laboratorio 2-Modelamiento-Tarejta STM32 - Sebastian PuertaSebastian PuertaAún no hay calificaciones
- Circuitos Contadores Practica 05Documento5 páginasCircuitos Contadores Practica 05william2688Aún no hay calificaciones
- A02 Guía Practica Control On Off PDFDocumento6 páginasA02 Guía Practica Control On Off PDFmanuel mazabuelAún no hay calificaciones
- Laboratorio ContadoresDocumento13 páginasLaboratorio ContadoresJosé Rafael VegasAún no hay calificaciones
- Infoplc Net GR Cj2m Md211 Md212Documento27 páginasInfoplc Net GR Cj2m Md211 Md212Alexander Diaz AlvarezAún no hay calificaciones
- Practica 1 Transportador MaletasDocumento31 páginasPractica 1 Transportador MaletasCristhian Garcia LopezAún no hay calificaciones
- 11.1 Guia PrácticaDocumento13 páginas11.1 Guia PrácticaJimenaAlexandraAroniPazAún no hay calificaciones
- Uso Del PWMDocumento42 páginasUso Del PWMJose Ruben TorresHortaAún no hay calificaciones
- Control PidDocumento18 páginasControl PidMiguelSalgadoAún no hay calificaciones
- Universidad Tecnol Ogica de TulancingoDocumento14 páginasUniversidad Tecnol Ogica de TulancingoArturo Hernández RomeroAún no hay calificaciones
- Control Selectivo Override Estación de CompresionDocumento7 páginasControl Selectivo Override Estación de CompresionAlfonso LoredoAún no hay calificaciones
- Practica 8 - Modulación Por Ancho de PulsoDocumento10 páginasPractica 8 - Modulación Por Ancho de PulsoAlejandra OlveraAún no hay calificaciones
- Tarea Semana 7Documento14 páginasTarea Semana 7victor torres burgosAún no hay calificaciones
- Entra Final ControlDocumento15 páginasEntra Final ControlMerlysKaterinePadillaOchoaAún no hay calificaciones
- Choper de FrenadoDocumento32 páginasChoper de FrenadoRomulo TorresAún no hay calificaciones
- Tacometro DigitalDocumento9 páginasTacometro DigitalFroylan Espinoza0% (1)
- Lab N°6 Programación AnalógicaDocumento22 páginasLab N°6 Programación AnalógicaRenzo GonzalesAún no hay calificaciones
- Sesión N°1 - Introducción PDFDocumento26 páginasSesión N°1 - Introducción PDFCarlos AndrésAún no hay calificaciones
- Lab 4 SCDDocumento15 páginasLab 4 SCDkateryneAún no hay calificaciones
- Cuestionario MonitoreoDocumento7 páginasCuestionario MonitoreoTania TorresAún no hay calificaciones
- Examen Centrales 1pdf PDFDocumento3 páginasExamen Centrales 1pdf PDFmarcoleon2014Aún no hay calificaciones
- PPI InformeDocumento14 páginasPPI InformeRonald SandovalAún no hay calificaciones
- PDFDocumento11 páginasPDFFlores KuAún no hay calificaciones
- Reporte Proyecto Final Automatizacion de TolvasDocumento10 páginasReporte Proyecto Final Automatizacion de TolvasAlejandro GuerreroAún no hay calificaciones
- Investigación Control DifusoDocumento17 páginasInvestigación Control DifusoRenato Angel Basurto MonteroAún no hay calificaciones
- Diseño y Ajuste de Controladores PidDocumento13 páginasDiseño y Ajuste de Controladores PidNABEAún no hay calificaciones
- Alejandra Leon Semana7Documento10 páginasAlejandra Leon Semana7alejandraAún no hay calificaciones
- Ekc 531D1 EspañolDocumento22 páginasEkc 531D1 EspañolgatoluisAún no hay calificaciones
- Reloj DigitalDocumento6 páginasReloj DigitalJosé Alberto GarcíaAún no hay calificaciones
- Control de Temperatura Proporcional Micrologix 1000Documento13 páginasControl de Temperatura Proporcional Micrologix 1000serolfitnas100% (2)
- Transmisor NeumaticoDocumento29 páginasTransmisor NeumaticoPedro SilvaAún no hay calificaciones
- Esfigmomanometro DigitalDocumento6 páginasEsfigmomanometro DigitalLaura Camila MontoyaAún no hay calificaciones
- Informe Practica 4 PDFDocumento9 páginasInforme Practica 4 PDFFranco Pérez MuñozAún no hay calificaciones
- Capitulo LLL TMGDocumento36 páginasCapitulo LLL TMGMarcelo Franco López PradoAún no hay calificaciones
- Medidor de Presion DigitalDocumento11 páginasMedidor de Presion DigitalpeterclamptonAún no hay calificaciones
- Proyecto Transmisor e Indicador de CaudalDocumento4 páginasProyecto Transmisor e Indicador de Caudaldaniel mosqueraAún no hay calificaciones
- Esquema de MandoDocumento7 páginasEsquema de MandozujeidisandreaAún no hay calificaciones
- Lab 1 SCRDocumento6 páginasLab 1 SCRAlexander GonzalezAún no hay calificaciones
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDe EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaAún no hay calificaciones
- Servicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoDe EverandServicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoCalificación: 5 de 5 estrellas5/5 (1)
- Reparación de instalaciones automatizadas. ELEE0109De EverandReparación de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- AA#2 ElectrotecniaV2Documento3 páginasAA#2 ElectrotecniaV2Ivan Monte NegroAún no hay calificaciones
- Diferencia Entre Watts y VoltiamperiosDocumento2 páginasDiferencia Entre Watts y VoltiamperiosIvan Monte NegroAún no hay calificaciones
- Recursos WebDocumento1 páginaRecursos WebIvan Monte NegroAún no hay calificaciones
- Ponenteselectronicos (4eso)Documento35 páginasPonenteselectronicos (4eso)Pablo LópezAún no hay calificaciones
- Campo Electrico 2 PDFDocumento52 páginasCampo Electrico 2 PDFJuan Nuñez RamirezAún no hay calificaciones
- Ejemplos de CircuitosDocumento2 páginasEjemplos de CircuitosIvan Monte NegroAún no hay calificaciones
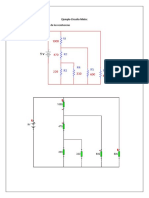
- Ejemplo Circuito MixtoDocumento3 páginasEjemplo Circuito MixtoIvan Monte NegroAún no hay calificaciones
- Tipos de Reles TemporizadosDocumento4 páginasTipos de Reles TemporizadosIvan Monte NegroAún no hay calificaciones
- Electronica Digital Ejercicio6Documento4 páginasElectronica Digital Ejercicio6Ángeles Campaña OlmosAún no hay calificaciones
- Codificadores y DecodificadoresDocumento7 páginasCodificadores y DecodificadoresIvan Monte NegroAún no hay calificaciones
- Instructivo Simulador Zelio SoftDocumento46 páginasInstructivo Simulador Zelio SoftLORD INDRAAún no hay calificaciones
- Capitulo 3Documento33 páginasCapitulo 3Ivan Monte NegroAún no hay calificaciones
- Ejercicios Tema 1 LEY OHDocumento4 páginasEjercicios Tema 1 LEY OHfcojcgAún no hay calificaciones
- Ejercicios Sistemas de EcuacionesDocumento1 páginaEjercicios Sistemas de EcuacionesIvan Monte NegroAún no hay calificaciones
- RodamientosDocumento3 páginasRodamientosIvan Monte NegroAún no hay calificaciones
- Tutorial Arduino - Ejemplos SemaforoDocumento12 páginasTutorial Arduino - Ejemplos SemaforoIvan Monte NegroAún no hay calificaciones
- Aa-Ejercicios de PorcentajesDocumento2 páginasAa-Ejercicios de PorcentajesIvan Monte NegroAún no hay calificaciones
- 2 Ejercicios Ley de Ohm PDFDocumento3 páginas2 Ejercicios Ley de Ohm PDFLuis Carlos ZuñigaAún no hay calificaciones
- Familias Logicas IntegradosDocumento4 páginasFamilias Logicas IntegradosAndres RodriguezAún no hay calificaciones
- Ejercicios ElectroneumaticaDocumento2 páginasEjercicios ElectroneumaticaIvan Monte Negro100% (1)
- Guia1 PLCDocumento17 páginasGuia1 PLCIvan Monte NegroAún no hay calificaciones
- Diseño y Manejo de Bases de Datos Clase1Documento25 páginasDiseño y Manejo de Bases de Datos Clase1Ivan Monte NegroAún no hay calificaciones
- Tema6 PDFDocumento21 páginasTema6 PDFFedericoHernandezAún no hay calificaciones
- El LadrilloDocumento47 páginasEl LadrilloIvan Monte NegroAún no hay calificaciones
- CERAMICOSDocumento15 páginasCERAMICOSChristian Moreno ZamoraAún no hay calificaciones
- Proc CMMant EquiposDocumento30 páginasProc CMMant EquiposKemner Llontop HerreraAún no hay calificaciones
- El Ladrillo 2009Documento39 páginasEl Ladrillo 2009L-Templao TemplailloAún no hay calificaciones
- Manual Pic y Lm35Documento5 páginasManual Pic y Lm35Ivan Monte NegroAún no hay calificaciones
- Hola Mundo en C#Documento31 páginasHola Mundo en C#Itzel GuadalupeAún no hay calificaciones
- David Pedro R - Sociologia JuridicaDocumento293 páginasDavid Pedro R - Sociologia JuridicaderechorumusAún no hay calificaciones
- Diapositiva de Prevencion de Accidentes y CaidasDocumento10 páginasDiapositiva de Prevencion de Accidentes y CaidasJaime Leon NoriegaAún no hay calificaciones
- Modelo OficiosDocumento3 páginasModelo OficiosCamila LopezAún no hay calificaciones
- Zookeeper UpRunningDocumento18 páginasZookeeper UpRunningrazasuperiorAún no hay calificaciones
- CerusitaDocumento28 páginasCerusitaCarlos LlonaAún no hay calificaciones
- Uso de GrafíasDocumento25 páginasUso de Grafíasjaime hernandez nuñezAún no hay calificaciones
- Academia Amantes Del Conocimiento: Ciclo Repaso San Marcos 2023 - IDocumento11 páginasAcademia Amantes Del Conocimiento: Ciclo Repaso San Marcos 2023 - IDiego Dueñas VelardeAún no hay calificaciones
- ¿Matemático, Yo ¡Claro Que Sí! (Parte 2) 11-11-2020Documento5 páginas¿Matemático, Yo ¡Claro Que Sí! (Parte 2) 11-11-2020Noelia CarrilloAún no hay calificaciones
- Algunas Recomendaciones Elevadores - CatalogoDocumento42 páginasAlgunas Recomendaciones Elevadores - Catalogomiguel angel castro contrerasAún no hay calificaciones
- Cuestionario de QuimicaDocumento20 páginasCuestionario de QuimicaNeil Edwin Alarcón RoseroAún no hay calificaciones
- Manejo Del Paciente Con ShockDocumento21 páginasManejo Del Paciente Con ShockFrancisca RubilarAún no hay calificaciones
- Avance Proyección SocialDocumento17 páginasAvance Proyección SocialLuz Sanchez FigueroaAún no hay calificaciones
- Animales PoligástricosDocumento5 páginasAnimales PoligástricosCristhian Jaico CruzAún no hay calificaciones
- (Catálogo) Lavadores-De-GasesDocumento7 páginas(Catálogo) Lavadores-De-GasesIgnacio GonzálezAún no hay calificaciones
- TP 641 2021-2 Trabajo PracticoDocumento9 páginasTP 641 2021-2 Trabajo PracticoLibia RodriguezAún no hay calificaciones
- SINONIMIADocumento4 páginasSINONIMIAAldahir Alexis Mendoza CastilloAún no hay calificaciones
- AP07-EV04 - Taller Sobre Preposiciones y Vocabulario Exhibición ComercialDocumento6 páginasAP07-EV04 - Taller Sobre Preposiciones y Vocabulario Exhibición ComercialTawanda PetersonAún no hay calificaciones
- Formato de Presupuesto de CasaDocumento12 páginasFormato de Presupuesto de CasaAB Sagma100% (1)
- Guitarra PDFDocumento14 páginasGuitarra PDFZAHID YASELGAAún no hay calificaciones
- Ficha Bata Paciente - LDocumento1 páginaFicha Bata Paciente - LJohn Garcia100% (1)
- Lab 15 - Clases y Objetos Chayña Huaman Carlos DanielDocumento13 páginasLab 15 - Clases y Objetos Chayña Huaman Carlos Danieldaniel torresAún no hay calificaciones
- Socio Critica 2Documento3 páginasSocio Critica 2BlackDeepAún no hay calificaciones
- Examen Nombre Jorge Ivan Lozano Belmontes 2a Mi PDFDocumento7 páginasExamen Nombre Jorge Ivan Lozano Belmontes 2a Mi PDFJosé Luis-099 EspartanAún no hay calificaciones
- Informe de Auditoria InternaDocumento3 páginasInforme de Auditoria InternaJair AguirreAún no hay calificaciones
- MPRL (3) Examen Inc 4Documento26 páginasMPRL (3) Examen Inc 4fernandoAún no hay calificaciones
- Evita Tocar Los Ojos, La Nariz y La Boca Antes de Lavarte Las Manos CorrectamenteDocumento3 páginasEvita Tocar Los Ojos, La Nariz y La Boca Antes de Lavarte Las Manos CorrectamenteKarina BarberanAún no hay calificaciones
- Caso 18 Pag 70 Ud 3Documento1 páginaCaso 18 Pag 70 Ud 3Martina Asín CortésAún no hay calificaciones
- Arotherm Split Manual de Usuario Unidad Interior MH 8kw 1627285 1Documento72 páginasArotherm Split Manual de Usuario Unidad Interior MH 8kw 1627285 1Inmaculada AsensioAún no hay calificaciones
- Instruction Manual Weighing Indicator Ti-500 E.en - EsDocumento19 páginasInstruction Manual Weighing Indicator Ti-500 E.en - EsEDUARDO HERNANDEZ100% (2)
- Acerca de La Entrevista ClinicaDocumento9 páginasAcerca de La Entrevista ClinicaFelipe FernandezAún no hay calificaciones