También podría gustarte
- Técnicas de análisis de imagen, (2a ed.): Aplicaciones en BiologíaDe EverandTécnicas de análisis de imagen, (2a ed.): Aplicaciones en BiologíaAún no hay calificaciones
- Reconocimiento óptico de Braille: Potenciando la accesibilidad a través de la inteligencia visualDe EverandReconocimiento óptico de Braille: Potenciando la accesibilidad a través de la inteligencia visualAún no hay calificaciones
- INFORME FINAL (SISTEMAS INTELIGENTESp)Documento15 páginasINFORME FINAL (SISTEMAS INTELIGENTESp)Rdriguez GamingAún no hay calificaciones
- InformeDocumento14 páginasInformeRdriguez GamingAún no hay calificaciones
- Visión Por Computadora Fundamentos y Metodos22Documento7 páginasVisión Por Computadora Fundamentos y Metodos22Fanigs SalAún no hay calificaciones
- ResumenProyecto - Valeria López - Etapa1Documento10 páginasResumenProyecto - Valeria López - Etapa1Valeriia López GarcíaAún no hay calificaciones
- Trabajo Metodos NumericosDocumento2 páginasTrabajo Metodos NumericosCristian Dario Lopez SarriaAún no hay calificaciones
- Instituto Tecnológico de Estudios Superiores de Monterrey: Campus Ciudad de MéxicoDocumento38 páginasInstituto Tecnológico de Estudios Superiores de Monterrey: Campus Ciudad de MéxicoXico EscobedoAún no hay calificaciones
- PDI Sintesis LuisPoloDocumento3 páginasPDI Sintesis LuisPoloLuis AlejandroAún no hay calificaciones
- ANALISISFORENSEDocumento76 páginasANALISISFORENSECinthya VargassAún no hay calificaciones
- Tratamiento de ImágenesDocumento16 páginasTratamiento de Imágenesedgar armando marin ballesterosAún no hay calificaciones
- Vision Artificial PythonDocumento6 páginasVision Artificial PythonAriel Cruz SusañoAún no hay calificaciones
- Procesamiento de ImagenesDocumento66 páginasProcesamiento de ImagenesKira PikimakiAún no hay calificaciones
- Metodos y Algoritmos de Procesamiento de ImágenesDocumento5 páginasMetodos y Algoritmos de Procesamiento de ImágenesNoheli VillaAún no hay calificaciones
- Proyecto de Deteccion de Humo Con Matlab PDFDocumento37 páginasProyecto de Deteccion de Humo Con Matlab PDFCarlos CarranzaAún no hay calificaciones
- Paso1 - Tratamineto de ImagenesDocumento22 páginasPaso1 - Tratamineto de ImagenesAndrés TabordaAún no hay calificaciones
- Sistemas de Vision PiaDocumento12 páginasSistemas de Vision PiaErickCruzAún no hay calificaciones
- Robot AutonomoDocumento15 páginasRobot AutonomoEdgar OvalleAún no hay calificaciones
- PFC Tamara Herrero VezDocumento192 páginasPFC Tamara Herrero VezAndrea PaolaAún no hay calificaciones
- Procesamiento de SeñalesDocumento23 páginasProcesamiento de SeñalessebastianAún no hay calificaciones
- Trabajo OrcDocumento26 páginasTrabajo OrcRamsesNiperAún no hay calificaciones
- Etapa 1 - Valeria LópezDocumento28 páginasEtapa 1 - Valeria LópezValeriia López GarcíaAún no hay calificaciones
- Proyecto Placas E3Documento46 páginasProyecto Placas E3Ruben CuervoAún no hay calificaciones
- Deteccion de CartasDocumento4 páginasDeteccion de CartasYesernestoAún no hay calificaciones
- Procesamiento Digital de La Huela DactilarDocumento5 páginasProcesamiento Digital de La Huela DactilarTitita AliceAún no hay calificaciones
- Algoritmos de CompresiónDocumento14 páginasAlgoritmos de CompresiónABNER EDUARDO PEDREGAL ALVARADOAún no hay calificaciones
- Manual de Prácticas de FotointerpretacionDocumento155 páginasManual de Prácticas de FotointerpretacionWilliams León Menacho100% (1)
- Etapa1 - Duban Delgadillo PDFDocumento15 páginasEtapa1 - Duban Delgadillo PDFDuban DelgadilloAún no hay calificaciones
- Algoritmo de Deteccion de BordesDocumento5 páginasAlgoritmo de Deteccion de BordesOscar MayorgaAún no hay calificaciones
- Formato AbedDocumento5 páginasFormato AbedLuis AlfredoAún no hay calificaciones
- Proyecto Optativa Primer ParcialDocumento21 páginasProyecto Optativa Primer ParcialAndree CrAún no hay calificaciones
- Lab6 IEC540Documento3 páginasLab6 IEC540javier RoblesAún no hay calificaciones
- Resumen Haar CascadeDocumento4 páginasResumen Haar CascadeRamiro VasquezAún no hay calificaciones
- ICC PLANTILLA CopyDocumento24 páginasICC PLANTILLA CopyMEDIOS PUBLICTARIOSAún no hay calificaciones
- Reporte Final de SVA.Documento14 páginasReporte Final de SVA.Juan Manuel Robles chavezAún no hay calificaciones
- Paso1 John MerchanDocumento28 páginasPaso1 John MerchanDong-YulHeiAún no hay calificaciones
- Investigación de Algoritmos de Visión Artificial.Documento8 páginasInvestigación de Algoritmos de Visión Artificial.Manuel MartínezAún no hay calificaciones
- Reporte de ResidenciasDocumento29 páginasReporte de ResidenciasDaniel ChairesAún no hay calificaciones
- PSR - Introducción - Procesamiento - ImágenesDocumento36 páginasPSR - Introducción - Procesamiento - ImágenesMel Vizcarra DávilaAún no hay calificaciones
- Sistemas de Visión Artificial, Historia, Componentes y Procesamiento de Imágenes.Documento8 páginasSistemas de Visión Artificial, Historia, Componentes y Procesamiento de Imágenes.ReNé Shun0% (2)
- Capítulo 1: 1. IntroducciónDocumento84 páginasCapítulo 1: 1. IntroducciónManny MerazinniAún no hay calificaciones
- Introduccion Vision Artificial PythonDocumento15 páginasIntroduccion Vision Artificial Pythonguillen joseAún no hay calificaciones
- Reconocimiento FacialDocumento24 páginasReconocimiento FacialWilmer SalvadorAún no hay calificaciones
- Procesamiento de Imagenes Digitales PROGRAMADocumento5 páginasProcesamiento de Imagenes Digitales PROGRAMAJuan Camilo Marin GarciaAún no hay calificaciones
- Procesamiento de Imagenes Digitales PROGRAMADocumento5 páginasProcesamiento de Imagenes Digitales PROGRAMAJuan Camilo Marin GarciaAún no hay calificaciones
- Procesamiento de Imagenes Digitales PROGRAMADocumento5 páginasProcesamiento de Imagenes Digitales PROGRAMAJuan Camilo Marin GarciaAún no hay calificaciones
- PFC CarmenVirginia Gamez JimenezDocumento174 páginasPFC CarmenVirginia Gamez JimenezMiguel Angel Acosta IpanaqueAún no hay calificaciones
- Tabla de VariablesDocumento5 páginasTabla de VariablesLalo Paolo Perez CamiloAún no hay calificaciones
- Deteccion de Rostro PracticaDocumento14 páginasDeteccion de Rostro PracticaJavier PaspuezánAún no hay calificaciones
- Practica 5 - JUAREZ CAMACHO JORGE LUISDocumento7 páginasPractica 5 - JUAREZ CAMACHO JORGE LUISJorge JuarezAún no hay calificaciones
- Ele11 PDFDocumento10 páginasEle11 PDFSantiago ChimborazoAún no hay calificaciones
- Proyecto G3 SIDocumento7 páginasProyecto G3 SIJOSE BRANDON CHRISTOPHER ALMANZA PONCEAún no hay calificaciones
- Monografia Reconocimiento de ImagenesDocumento11 páginasMonografia Reconocimiento de ImagenesLinda CarvajalAún no hay calificaciones
- Huachin SGDocumento106 páginasHuachin SGuberstrike angel xpAún no hay calificaciones
- Verdadero Protocolo para El TTDocumento5 páginasVerdadero Protocolo para El TTJ Uriel CorderoAún no hay calificaciones
- SegmentaciónDocumento7 páginasSegmentaciónCristina TupeAún no hay calificaciones
- Practica Medición de NivelDocumento10 páginasPractica Medición de NivelRonnie LoboAún no hay calificaciones
- PRACTICA#2 Contador de Objetos y Monedas Por Visión - MEC 8-2Documento8 páginasPRACTICA#2 Contador de Objetos y Monedas Por Visión - MEC 8-2alberto.am0104Aún no hay calificaciones
- Procesamiento de Video Con FFTDocumento9 páginasProcesamiento de Video Con FFTAngel HernandezAún no hay calificaciones
- Sensor Detector de Rostro FinalDocumento43 páginasSensor Detector de Rostro Finalvictortisca12Aún no hay calificaciones
- Modelamiento de Base de DatosDocumento2 páginasModelamiento de Base de Datoscarlos quispeAún no hay calificaciones
- Semana 14Documento2 páginasSemana 14carlos quispeAún no hay calificaciones
- Examen Final - Redes y Comunicaciones Ii 2021-1 TMDocumento10 páginasExamen Final - Redes y Comunicaciones Ii 2021-1 TMcarlos quispeAún no hay calificaciones
- Informe de GtiDocumento33 páginasInforme de Gticarlos quispeAún no hay calificaciones
- Informe FinalDocumento6 páginasInforme Finalcarlos quispeAún no hay calificaciones
- Informe FinalDocumento3 páginasInforme Finalcarlos quispeAún no hay calificaciones
- Trabajo FinalDocumento9 páginasTrabajo Finalcarlos quispeAún no hay calificaciones
- Proyecto REDES II - Art Revisión ISG WS2019 SGDDocumento27 páginasProyecto REDES II - Art Revisión ISG WS2019 SGDcarlos quispeAún no hay calificaciones
- INSI - SISINT - Practica - 2.1 (Programa de Procesamiento de Imágenes Con Python)Documento1 páginaINSI - SISINT - Practica - 2.1 (Programa de Procesamiento de Imágenes Con Python)carlos quispeAún no hay calificaciones
- EstrategiaDocumento1 páginaEstrategiacarlos quispeAún no hay calificaciones
- PDF Plan de Marketing InkafarmaDocumento28 páginasPDF Plan de Marketing Inkafarmacarlos quispeAún no hay calificaciones
- Tarea 4Documento4 páginasTarea 4carlos quispeAún no hay calificaciones
- SESION 2 Marketing. Versión para Latinoamérica - 11edi Kottler-FREELIBROS - ORG-páginas-314-323Documento10 páginasSESION 2 Marketing. Versión para Latinoamérica - 11edi Kottler-FREELIBROS - ORG-páginas-314-323carlos quispeAún no hay calificaciones
- El ROL DE LA ÉTICA EN EL ADMINISTRADOR-G.AdmintraciómDocumento13 páginasEl ROL DE LA ÉTICA EN EL ADMINISTRADOR-G.Admintraciómcarlos quispeAún no hay calificaciones
- Logistica Final 2019Documento40 páginasLogistica Final 2019carlos quispe100% (1)
- Guia de Laboratorio Nro 02Documento13 páginasGuia de Laboratorio Nro 02carlos quispeAún no hay calificaciones
- Ficha de Aplicación 3Documento4 páginasFicha de Aplicación 3carlos quispeAún no hay calificaciones
- Actividad 2 Matriz Regulacion Toxicologica y Agentes ToxicosDocumento16 páginasActividad 2 Matriz Regulacion Toxicologica y Agentes ToxicosDANY ALEJANDRO POLO RAMIREZAún no hay calificaciones
- Torno, Fresadora, y CepilloDocumento5 páginasTorno, Fresadora, y CepilloJuanDavidGarcíaAún no hay calificaciones
- Trabajo Lluvia de IdeasDocumento1 páginaTrabajo Lluvia de IdeasHugo Anthony Barragan CRAún no hay calificaciones
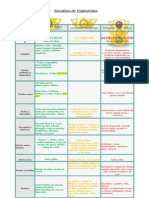
- Semaforo Hipertrigliceridemia (1) ChequeadaDocumento2 páginasSemaforo Hipertrigliceridemia (1) ChequeadaMarcela AdasmeAún no hay calificaciones
- 07 Procedimiento de Empleo de EppDocumento10 páginas07 Procedimiento de Empleo de EppJulio RodriguezAún no hay calificaciones
- Examen - (AAB01) Cuestionario 3 - Desarrolle La Tercera Evaluación Parcial de La Unidad 3 - Proyectos de Intervención en El Área de La SaludDocumento3 páginasExamen - (AAB01) Cuestionario 3 - Desarrolle La Tercera Evaluación Parcial de La Unidad 3 - Proyectos de Intervención en El Área de La SaludNaomi Flores100% (2)
- Estructuray Mantenimiento GuitarraDocumento16 páginasEstructuray Mantenimiento GuitarraRafaelAún no hay calificaciones
- Actividades Finales de Repaso de Lengua (4) (2122)Documento3 páginasActividades Finales de Repaso de Lengua (4) (2122)Consuelo AbadAún no hay calificaciones
- Tabla de Especifícaciones de ReactivosDocumento3 páginasTabla de Especifícaciones de ReactivosEventos BonvivantAún no hay calificaciones
- Productividad Fabrica Nacional Calzado Curtiduria Zamora S.ADocumento5 páginasProductividad Fabrica Nacional Calzado Curtiduria Zamora S.ADiana Marcela Sanchez PerezAún no hay calificaciones
- Según JacksonDocumento2 páginasSegún JacksonAnthony HMAún no hay calificaciones
- MINCETURDocumento56 páginasMINCETURMarco Reategui RamosAún no hay calificaciones
- NTP-1068 2016 Vibraciones Alternativas para Evaluar El RiesgoDocumento6 páginasNTP-1068 2016 Vibraciones Alternativas para Evaluar El RiesgoAnonymous IbHP1NYAún no hay calificaciones
- Antropología Rural Argentina Tomo II - Ratier - Juan PDFDocumento290 páginasAntropología Rural Argentina Tomo II - Ratier - Juan PDFJuan Patricio Addesso100% (1)
- Alvarado Arlette HPE101 9544Documento2 páginasAlvarado Arlette HPE101 9544Arlette Alvarado MoralesAún no hay calificaciones
- Caso A FacturarDocumento4 páginasCaso A FacturarWalter castillo anguloAún no hay calificaciones
- Helicobacter PyloryDocumento11 páginasHelicobacter PyloryVeronica Garcia Peñafiel100% (2)
- FISICA II Taller1 CondensadoresDocumento1 páginaFISICA II Taller1 CondensadoresFabian Molina CarvajalAún no hay calificaciones
- EJERCICIO PRACTICO No 3 PLANEACION DE LA PRODUCCIONDocumento2 páginasEJERCICIO PRACTICO No 3 PLANEACION DE LA PRODUCCIONKarol Jimena PeñaAún no hay calificaciones
- Cómo Se Pagan Las Vacaciones No Disfrutadas en MéxicoDocumento6 páginasCómo Se Pagan Las Vacaciones No Disfrutadas en MéxicoAnne GaleanaAún no hay calificaciones
- Práctica de PAreto, Teoría de Decisiones Yorleny CuetoDocumento27 páginasPráctica de PAreto, Teoría de Decisiones Yorleny CuetoYorleny CuetoAún no hay calificaciones
- Invaginacion Intestinal AgudaDocumento1 páginaInvaginacion Intestinal AgudaAlexis Nuñez0% (1)
- Actividad Virtual N°3 - Revisión de IntentosDocumento4 páginasActividad Virtual N°3 - Revisión de IntentosEDU PALOMINO MENDOZAAún no hay calificaciones
- 4.cerradura Manija Ev60 G2 D-InoxDocumento1 página4.cerradura Manija Ev60 G2 D-InoxEscobar ProduccionesAún no hay calificaciones
- Bbva CajamarcaDocumento85 páginasBbva CajamarcaJosé Gregorio Lugo MorenoAún no hay calificaciones
- ExposicionDocumento18 páginasExposicionLuis Alfredo GaiborAún no hay calificaciones
- PINEARQ Diseño Habitaciones HospitalariasDocumento4 páginasPINEARQ Diseño Habitaciones HospitalariasLuis Eduardo Mata VillalbaAún no hay calificaciones
- Manual Delegados Cne 2021Documento16 páginasManual Delegados Cne 2021Primaria Barrio la EstanciaAún no hay calificaciones
- Germen DentalDocumento4 páginasGermen DentalSandra MolinaAún no hay calificaciones