También podría gustarte
- Técnicas de análisis de imagen, (2a ed.): Aplicaciones en BiologíaDe EverandTécnicas de análisis de imagen, (2a ed.): Aplicaciones en BiologíaAún no hay calificaciones
- InformeDocumento14 páginasInformeRdriguez GamingAún no hay calificaciones
- InformeDocumento22 páginasInformecarlos quispeAún no hay calificaciones
- ResumenProyecto - Valeria López - Etapa1Documento10 páginasResumenProyecto - Valeria López - Etapa1Valeriia López GarcíaAún no hay calificaciones
- Visión Por Computadora Fundamentos y Metodos22Documento7 páginasVisión Por Computadora Fundamentos y Metodos22Fanigs SalAún no hay calificaciones
- Instituto Tecnológico de Estudios Superiores de Monterrey: Campus Ciudad de MéxicoDocumento38 páginasInstituto Tecnológico de Estudios Superiores de Monterrey: Campus Ciudad de MéxicoXico EscobedoAún no hay calificaciones
- Trabajo Metodos NumericosDocumento2 páginasTrabajo Metodos NumericosCristian Dario Lopez SarriaAún no hay calificaciones
- ANALISISFORENSEDocumento76 páginasANALISISFORENSECinthya VargassAún no hay calificaciones
- PDI Sintesis LuisPoloDocumento3 páginasPDI Sintesis LuisPoloLuis AlejandroAún no hay calificaciones
- Tratamiento de ImágenesDocumento16 páginasTratamiento de Imágenesedgar armando marin ballesterosAún no hay calificaciones
- Proyecto de Deteccion de Humo Con Matlab PDFDocumento37 páginasProyecto de Deteccion de Humo Con Matlab PDFCarlos CarranzaAún no hay calificaciones
- Vision Artificial PythonDocumento6 páginasVision Artificial PythonAriel Cruz SusañoAún no hay calificaciones
- Robot AutonomoDocumento15 páginasRobot AutonomoEdgar OvalleAún no hay calificaciones
- Procesamiento de ImagenesDocumento66 páginasProcesamiento de ImagenesKira PikimakiAún no hay calificaciones
- Sistemas de Vision PiaDocumento12 páginasSistemas de Vision PiaErickCruzAún no hay calificaciones
- Metodos y Algoritmos de Procesamiento de ImágenesDocumento5 páginasMetodos y Algoritmos de Procesamiento de ImágenesNoheli VillaAún no hay calificaciones
- Paso1 - Tratamineto de ImagenesDocumento22 páginasPaso1 - Tratamineto de ImagenesAndrés TabordaAún no hay calificaciones
- Etapa 1 - Valeria LópezDocumento28 páginasEtapa 1 - Valeria LópezValeriia López GarcíaAún no hay calificaciones
- Procesamiento de SeñalesDocumento23 páginasProcesamiento de SeñalessebastianAún no hay calificaciones
- Proyecto Placas E3Documento46 páginasProyecto Placas E3Ruben CuervoAún no hay calificaciones
- Manual de Prácticas de FotointerpretacionDocumento155 páginasManual de Prácticas de FotointerpretacionWilliams León Menacho100% (1)
- Trabajo OrcDocumento26 páginasTrabajo OrcRamsesNiperAún no hay calificaciones
- PFC Tamara Herrero VezDocumento192 páginasPFC Tamara Herrero VezAndrea PaolaAún no hay calificaciones
- Deteccion de CartasDocumento4 páginasDeteccion de CartasYesernestoAún no hay calificaciones
- Formato AbedDocumento5 páginasFormato AbedLuis AlfredoAún no hay calificaciones
- Procesamiento Digital de La Huela DactilarDocumento5 páginasProcesamiento Digital de La Huela DactilarTitita AliceAún no hay calificaciones
- Proyecto Optativa Primer ParcialDocumento21 páginasProyecto Optativa Primer ParcialAndree CrAún no hay calificaciones
- Algoritmos de CompresiónDocumento14 páginasAlgoritmos de CompresiónABNER EDUARDO PEDREGAL ALVARADOAún no hay calificaciones
- Capítulo 1: 1. IntroducciónDocumento84 páginasCapítulo 1: 1. IntroducciónManny MerazinniAún no hay calificaciones
- Etapa1 - Duban Delgadillo PDFDocumento15 páginasEtapa1 - Duban Delgadillo PDFDuban DelgadilloAún no hay calificaciones
- Sistemas de Visión Artificial, Historia, Componentes y Procesamiento de Imágenes.Documento8 páginasSistemas de Visión Artificial, Historia, Componentes y Procesamiento de Imágenes.ReNé Shun0% (2)
- Procesamiento de Imagenes Digitales PROGRAMADocumento5 páginasProcesamiento de Imagenes Digitales PROGRAMAJuan Camilo Marin GarciaAún no hay calificaciones
- Procesamiento de Imagenes Digitales PROGRAMADocumento5 páginasProcesamiento de Imagenes Digitales PROGRAMAJuan Camilo Marin GarciaAún no hay calificaciones
- Procesamiento de Imagenes Digitales PROGRAMADocumento5 páginasProcesamiento de Imagenes Digitales PROGRAMAJuan Camilo Marin GarciaAún no hay calificaciones
- Paso1 John MerchanDocumento28 páginasPaso1 John MerchanDong-YulHeiAún no hay calificaciones
- PSR - Introducción - Procesamiento - ImágenesDocumento36 páginasPSR - Introducción - Procesamiento - ImágenesMel Vizcarra DávilaAún no hay calificaciones
- ICC PLANTILLA CopyDocumento24 páginasICC PLANTILLA CopyMEDIOS PUBLICTARIOSAún no hay calificaciones
- Reporte Final de SVA.Documento14 páginasReporte Final de SVA.Juan Manuel Robles chavezAún no hay calificaciones
- Practica 5 - JUAREZ CAMACHO JORGE LUISDocumento7 páginasPractica 5 - JUAREZ CAMACHO JORGE LUISJorge JuarezAún no hay calificaciones
- Lab6 IEC540Documento3 páginasLab6 IEC540javier RoblesAún no hay calificaciones
- Huachin SGDocumento106 páginasHuachin SGuberstrike angel xpAún no hay calificaciones
- Investigación de Algoritmos de Visión Artificial.Documento8 páginasInvestigación de Algoritmos de Visión Artificial.Manuel MartínezAún no hay calificaciones
- Introduccion Vision Artificial PythonDocumento15 páginasIntroduccion Vision Artificial Pythonguillen joseAún no hay calificaciones
- Tabla de VariablesDocumento5 páginasTabla de VariablesLalo Paolo Perez CamiloAún no hay calificaciones
- Resumen Haar CascadeDocumento4 páginasResumen Haar CascadeRamiro VasquezAún no hay calificaciones
- Reporte de ResidenciasDocumento29 páginasReporte de ResidenciasDaniel ChairesAún no hay calificaciones
- Practica Medición de NivelDocumento10 páginasPractica Medición de NivelRonnie LoboAún no hay calificaciones
- Procesamiento de Video Con FFTDocumento9 páginasProcesamiento de Video Con FFTAngel HernandezAún no hay calificaciones
- PRACTICA#2 Contador de Objetos y Monedas Por Visión - MEC 8-2Documento8 páginasPRACTICA#2 Contador de Objetos y Monedas Por Visión - MEC 8-2alberto.am0104Aún no hay calificaciones
- Verdadero Protocolo para El TTDocumento5 páginasVerdadero Protocolo para El TTJ Uriel CorderoAún no hay calificaciones
- Reconocimiento FacialDocumento24 páginasReconocimiento FacialWilmer SalvadorAún no hay calificaciones
- SegmentaciónDocumento7 páginasSegmentaciónCristina TupeAún no hay calificaciones
- Sensor Detector de Rostro FinalDocumento43 páginasSensor Detector de Rostro Finalvictortisca12Aún no hay calificaciones
- Procesamiento Digital de Imagenes para Conteo de Monedas en MATLABDocumento4 páginasProcesamiento Digital de Imagenes para Conteo de Monedas en MATLABRenzzo Gomez ReatigaAún no hay calificaciones
- Monografia Reconocimiento de ImagenesDocumento11 páginasMonografia Reconocimiento de ImagenesLinda CarvajalAún no hay calificaciones
- Reconocimiento de Rostros en Tiempo Real Sobre Dispositivos Móviles de Bajo CostoDocumento10 páginasReconocimiento de Rostros en Tiempo Real Sobre Dispositivos Móviles de Bajo CostoGaston Fernandez SosaAún no hay calificaciones
- S01.s1 - MaterialDocumento38 páginasS01.s1 - MaterialGiancarlo Zevallos LeccaAún no hay calificaciones
- Pixeles A ObjetosDocumento9 páginasPixeles A ObjetosluisAún no hay calificaciones
- Ele11 PDFDocumento10 páginasEle11 PDFSantiago ChimborazoAún no hay calificaciones
- PFC CarmenVirginia Gamez JimenezDocumento174 páginasPFC CarmenVirginia Gamez JimenezMiguel Angel Acosta IpanaqueAún no hay calificaciones
- Informe AvanceDocumento26 páginasInforme AvanceRdriguez GamingAún no hay calificaciones
- Cita y Biblio ...Documento1 páginaCita y Biblio ...Rdriguez GamingAún no hay calificaciones
- Práctica 12 PlataformaDocumento6 páginasPráctica 12 PlataformaRdriguez GamingAún no hay calificaciones
- Informe PTDocumento9 páginasInforme PTRdriguez GamingAún no hay calificaciones
- Laboratorio Sesion 4 - Practica GRUPO 6Documento19 páginasLaboratorio Sesion 4 - Practica GRUPO 6Rdriguez GamingAún no hay calificaciones
- Modelo Proyecto FinalDocumento3 páginasModelo Proyecto FinalRdriguez GamingAún no hay calificaciones
- Examen Parcial 1 - Redes y Comunicaciones II 2021 2Documento6 páginasExamen Parcial 1 - Redes y Comunicaciones II 2021 2Rdriguez GamingAún no hay calificaciones
- Informe FinalDocumento6 páginasInforme Finalcarlos quispeAún no hay calificaciones
- Planta 1 1 Planta 2 2 Nivel - 1 3: P-3 Proyecto Arquitectonico 3 Escuela de Arquitectura y UrbanismoDocumento3 páginasPlanta 1 1 Planta 2 2 Nivel - 1 3: P-3 Proyecto Arquitectonico 3 Escuela de Arquitectura y Urbanismoapi-562819542Aún no hay calificaciones
- Listado Productos LineasDocumento11 páginasListado Productos LineasAnderson EspitiaAún no hay calificaciones
- Matematicas 1ºDocumento62 páginasMatematicas 1ºAreli Yessenia Huaranga FigueroaAún no hay calificaciones
- La Imagen DigitaltpDocumento3 páginasLa Imagen DigitaltpIvonne ZenozainAún no hay calificaciones
- T1 La Imagen Fija DigitalDocumento11 páginasT1 La Imagen Fija DigitalRafael Vidal SanzAún no hay calificaciones
- Cascos MRM Sep 2022 1Documento81 páginasCascos MRM Sep 2022 1JONATHANAún no hay calificaciones
- Relleno de PoligonosDocumento7 páginasRelleno de PoligonosRene ManrriquezAún no hay calificaciones
- 1 Conceptos Basicos de Imagen Digital PDFDocumento8 páginas1 Conceptos Basicos de Imagen Digital PDFJulio Melendez MoralesAún no hay calificaciones
- Especificaciones T para Ortofotos Digitales IGMDocumento10 páginasEspecificaciones T para Ortofotos Digitales IGMAlex ChaucaAún no hay calificaciones
- Codigo Colores Cables Motos (1) - 1Documento1 páginaCodigo Colores Cables Motos (1) - 1Maxii YevaraAún no hay calificaciones
- Atajos IllustratorDocumento3 páginasAtajos Illustratorandresskpunk93Aún no hay calificaciones
- El Formato RAW PDFDocumento4 páginasEl Formato RAW PDFtarzandelosgnomosAún no hay calificaciones
- Presentación 4. Color - Temperatura y ContrastesDocumento21 páginasPresentación 4. Color - Temperatura y ContrastesalexmixjzAún no hay calificaciones
- APIC Lecture2 ImageProc. CasteDocumento114 páginasAPIC Lecture2 ImageProc. CasteMaría CarriónAún no hay calificaciones
- Examen Teorico de Teoria Del ColorDocumento4 páginasExamen Teorico de Teoria Del ColorNelson Aranibar Regalado90% (10)
- 2019 - II - rptPA - 9Documento4 páginas2019 - II - rptPA - 9gersonAún no hay calificaciones
- Real Draw Pro EstudianteDocumento7 páginasReal Draw Pro EstudianteCesar Argentino LainezAún no hay calificaciones
- Festin de CuervosDocumento23 páginasFestin de CuervosNilton Cruz CornejoAún no hay calificaciones
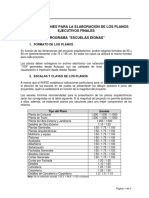
- Especificaciones para La Elaboración de Los Planos Ejecutivos FinalesDocumento5 páginasEspecificaciones para La Elaboración de Los Planos Ejecutivos FinalesEdwin Unlimi TedAún no hay calificaciones
- PA 03 GeometriaDocumento10 páginasPA 03 GeometriaJOSE ANTONIO SAAVEDRA GUEVARAAún no hay calificaciones
- Lista de Tintas Mantillas Quimicos y OtrosDocumento2 páginasLista de Tintas Mantillas Quimicos y OtrosesmeraldaAún no hay calificaciones
- RadiosityDocumento59 páginasRadiosityYael Bobadilla Inclan100% (2)
- Tema 3 ResoluciónDocumento5 páginasTema 3 ResoluciónserAún no hay calificaciones
- PDF TegucigalpaDocumento8 páginasPDF Tegucigalpajohnballe6133Aún no hay calificaciones
- Busca Las ImágenesDocumento6 páginasBusca Las ImágenesSamAún no hay calificaciones
- Plantilla 1. Computación GráficaDocumento6 páginasPlantilla 1. Computación GráficaDiego UlloaAún no hay calificaciones
- Evolucion de Las Tarjetas Graficas PDFDocumento12 páginasEvolucion de Las Tarjetas Graficas PDFdianac90Aún no hay calificaciones
- Solu Guia 24Documento1 páginaSolu Guia 24Ana Perez GonzalezAún no hay calificaciones
- Sistema Productivo de GuatemalaDocumento3 páginasSistema Productivo de GuatemalaWuanerges RuízAún no hay calificaciones
- Open GLDocumento10 páginasOpen GLmanfenixAún no hay calificaciones
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Guía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaDe EverandGuía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaCalificación: 3.5 de 5 estrellas3.5/5 (2)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- Lógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosDe EverandLógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosCalificación: 3.5 de 5 estrellas3.5/5 (7)
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Curso básico de Python: La guía para principiantes para una introducción en la programación con PythonDe EverandCurso básico de Python: La guía para principiantes para una introducción en la programación con PythonAún no hay calificaciones
- El mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosDe EverandEl mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosCalificación: 5 de 5 estrellas5/5 (2)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDe EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialCalificación: 4.5 de 5 estrellas4.5/5 (10)
- Todo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainDe EverandTodo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainAún no hay calificaciones
- La psicología del trading de una forma sencilla: Cómo aplicar las estrategias psicológicas y las actitudes de los comerciantes ganadores para operar con éxito en línea.De EverandLa psicología del trading de una forma sencilla: Cómo aplicar las estrategias psicológicas y las actitudes de los comerciantes ganadores para operar con éxito en línea.Calificación: 4.5 de 5 estrellas4.5/5 (3)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.De EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Calificación: 4.5 de 5 estrellas4.5/5 (54)
- Inteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaDe EverandInteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaAna Isabel Sánchez DíezCalificación: 4 de 5 estrellas4/5 (3)
- Inteligencia artificial: Análisis de datos e innovación para principiantesDe EverandInteligencia artificial: Análisis de datos e innovación para principiantesCalificación: 4 de 5 estrellas4/5 (3)
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosDe Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosCalificación: 5 de 5 estrellas5/5 (1)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.De EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Calificación: 5 de 5 estrellas5/5 (1)
- ChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...De EverandChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Calificación: 5 de 5 estrellas5/5 (4)
- Artes visuales: Producción y análisis de la imagenDe EverandArtes visuales: Producción y análisis de la imagenCalificación: 5 de 5 estrellas5/5 (1)
- Machine Learning y Deep Learning: Usando Python, Scikit y KerasDe EverandMachine Learning y Deep Learning: Usando Python, Scikit y KerasAún no hay calificaciones
- Ciberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialDe EverandCiberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialCalificación: 4.5 de 5 estrellas4.5/5 (11)