También podría gustarte
- Manual Del Participante DNC StpsDocumento41 páginasManual Del Participante DNC StpsSucely Palacios Avendaño50% (2)
- Formatos de Verificacion de Limpieza Del CIP PDFDocumento1 páginaFormatos de Verificacion de Limpieza Del CIP PDFdayana cortes100% (2)
- 5° Las Pecaminosas Noches de Un NobleDocumento162 páginas5° Las Pecaminosas Noches de Un NobleAmy Baalzephon100% (1)
- Biodiversidad de HongosDocumento11 páginasBiodiversidad de HongosAvia Solano SofíaAún no hay calificaciones
- Resumen Texto Historia Del DerechoDocumento10 páginasResumen Texto Historia Del Derecholupe diaz100% (3)
- Perforacion de Pozos HPHTDocumento24 páginasPerforacion de Pozos HPHTAndreitaDayaraIbañezFloresAún no hay calificaciones
- Modelo Dinamico Formulacion de Lagrange EulerDocumento17 páginasModelo Dinamico Formulacion de Lagrange EulerAngel LojanoAún no hay calificaciones
- Proyecto Control de Velocidad de Un Motor de CD Con OperacionalesDocumento21 páginasProyecto Control de Velocidad de Un Motor de CD Con Operacionalesramses zamora ortizAún no hay calificaciones
- Informe de Gestion de RiesgosDocumento9 páginasInforme de Gestion de RiesgosHebert VereauAún no hay calificaciones
- Bipolar JamisonDocumento14 páginasBipolar JamisonANGELA AGUIRREAún no hay calificaciones
- Examen Unidad 3Documento15 páginasExamen Unidad 3JOAQUIN CALDERON ROSASAún no hay calificaciones
- Lab 2 CombiDocumento20 páginasLab 2 CombiCarlos BautistaAún no hay calificaciones
- Gerontologia Opto PDFDocumento5 páginasGerontologia Opto PDFmarco avilaAún no hay calificaciones
- Practica 7 ControlDocumento18 páginasPractica 7 ControlDaniel Loaiza LópezAún no hay calificaciones
- Programacion Didactica El Circo de ColoresDocumento5 páginasProgramacion Didactica El Circo de Coloreswhilma ferreiraAún no hay calificaciones
- CTM Ejemplo - Modelación Del Experimento Barra y BolaDocumento7 páginasCTM Ejemplo - Modelación Del Experimento Barra y BolaWilson Barco MAún no hay calificaciones
- Problemas 2dfdfDocumento10 páginasProblemas 2dfdfJason Aguilar MillaAún no hay calificaciones
- Lab 6 Estabilidad de Sistemas LinealesDocumento18 páginasLab 6 Estabilidad de Sistemas LinealesliligkjjAún no hay calificaciones
- Método de La SecanteDocumento7 páginasMétodo de La SecanteJack vargasAún no hay calificaciones
- Angulos RPY y EulerDocumento6 páginasAngulos RPY y EulerLesg SantiagoAún no hay calificaciones
- Resolucion Del Problema Cinematico Del Robot Articular de 2 Grados de LibertadDocumento11 páginasResolucion Del Problema Cinematico Del Robot Articular de 2 Grados de LibertadMichel Chacon MarrufoAún no hay calificaciones
- Uso de Señales Reales y ComplejasDocumento2 páginasUso de Señales Reales y ComplejasLeo Escobar100% (1)
- Guía de Ejemplo PDFDocumento4 páginasGuía de Ejemplo PDFNairoby Espinosa0% (1)
- Practica Principios EléctricosDocumento17 páginasPractica Principios EléctricosOmar VlogsAún no hay calificaciones
- Error en Estado Estacionario ResueltoDocumento9 páginasError en Estado Estacionario ResueltoTrabajos AcademicosAún no hay calificaciones
- 2758 - Grupo 3 - Taller 3Documento19 páginas2758 - Grupo 3 - Taller 3Kevin CaicedoAún no hay calificaciones
- Practica 4 Contador AsincronoDocumento5 páginasPractica 4 Contador AsincronoRulo PinedaAún no hay calificaciones
- Taller Transformada Z Inversa y Ecuaciones en DiferenciaDocumento1 páginaTaller Transformada Z Inversa y Ecuaciones en Diferenciastephen oliverosAún no hay calificaciones
- Pendulo de FurutaDocumento9 páginasPendulo de FurutaVeronika AbarcaAún no hay calificaciones
- E2550-1P209 ResueltoDocumento8 páginasE2550-1P209 ResueltoFabricio FloresAún no hay calificaciones
- Coleccion Problem As CA 3Documento134 páginasColeccion Problem As CA 3Ronny RamírezAún no hay calificaciones
- Taller 1 Control 2015 UniandesDocumento5 páginasTaller 1 Control 2015 UniandesSebastian MorenoAún no hay calificaciones
- Parcial - 2corte - Dinamica - 2021-II Universidad ECCIDocumento1 páginaParcial - 2corte - Dinamica - 2021-II Universidad ECCIAndres Felipe Perez BustamanteAún no hay calificaciones
- Laboratorio 1 Uso Inicial Del Lenguale EnsambladorDocumento6 páginasLaboratorio 1 Uso Inicial Del Lenguale EnsambladorjsofiabeltranAún no hay calificaciones
- Recursividad + Pilas JavaDocumento9 páginasRecursividad + Pilas JavaTatiana CaceresAún no hay calificaciones
- Comparador Sistemas DigitalesDocumento5 páginasComparador Sistemas DigitalesjorAún no hay calificaciones
- Laboratorio 2 de Circuitos Eléctricos 2410Documento20 páginasLaboratorio 2 de Circuitos Eléctricos 2410Nestor GuillenAún no hay calificaciones
- Turbina en SolidworkDocumento21 páginasTurbina en SolidworklucianoAún no hay calificaciones
- Laboratorio 3 Electronica de Potencia 1Documento13 páginasLaboratorio 3 Electronica de Potencia 1Manuel GonzalezAún no hay calificaciones
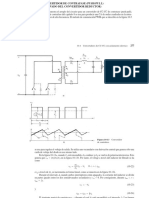
- Convertidor Contrafase (Push-Pull)Documento3 páginasConvertidor Contrafase (Push-Pull)Rafael RivasAún no hay calificaciones
- Modelos Final PDFDocumento4 páginasModelos Final PDFEduardo RodriguezAún no hay calificaciones
- Trabajo 1 - Control No LinealDocumento10 páginasTrabajo 1 - Control No LinealCristian CentenoAún no hay calificaciones
- Sistema Mecánico TraslacionalDocumento2 páginasSistema Mecánico TraslacionalMario Roberto100% (1)
- Ing. Germán PalaciosDocumento64 páginasIng. Germán PalaciosErik Fernando Gómez ClavijoAún no hay calificaciones
- Ejercicios PDFDocumento72 páginasEjercicios PDFByron MonterrozaAún no hay calificaciones
- Modelo Matematico Gobierno de BuquesDocumento7 páginasModelo Matematico Gobierno de BuquesPAUL ROY CABAÑA JAÑAAún no hay calificaciones
- 01 Conversion Tap ADocumento140 páginas01 Conversion Tap Acalamandro saezAún no hay calificaciones
- Hidrodinamica Ejercicio 6Documento22 páginasHidrodinamica Ejercicio 6MendozaAún no hay calificaciones
- Ley de CoulombDocumento16 páginasLey de CoulombSilvana GetialAún no hay calificaciones
- Labo 3Documento11 páginasLabo 3nicole vargas ponceAún no hay calificaciones
- Red ZobelDocumento11 páginasRed ZobelEdgar MamaniAún no hay calificaciones
- Ejemplo de Un Informe para Métodos NúmericosDocumento12 páginasEjemplo de Un Informe para Métodos NúmericosSergio David Pardo Guerrero100% (1)
- Práctica 3Documento14 páginasPráctica 3DianaAún no hay calificaciones
- Sistemas en Tiempo ContinuoDocumento34 páginasSistemas en Tiempo ContinuoEl CanoeroAún no hay calificaciones
- actividaYTYd 2Documento18 páginasactividaYTYd 2WILFREDO ALANYA PESUAAún no hay calificaciones
- Euler Lagrange Equipo 5Documento10 páginasEuler Lagrange Equipo 5Alexis L.M.Aún no hay calificaciones
- Primer EjercicioDocumento11 páginasPrimer EjercicioMenaly Luzuriaga100% (1)
- Electronica ResumeDocumento13 páginasElectronica ResumeDaniel LopezAún no hay calificaciones
- Parcial 1 III Parte Ee TermDocumento4 páginasParcial 1 III Parte Ee TermJorge Isaac Flores SamaniegoAún no hay calificaciones
- Informe - Diseño de Amplificador MosfetDocumento4 páginasInforme - Diseño de Amplificador MosfetandresAún no hay calificaciones
- Maquinas de EstadoDocumento8 páginasMaquinas de EstadoSergio GuarinAún no hay calificaciones
- Lab1 IEEEDocumento6 páginasLab1 IEEEJhulian VillafuerteAún no hay calificaciones
- Solucionario Del Examen ParcialDocumento7 páginasSolucionario Del Examen ParcialLourdes AquinoAún no hay calificaciones
- Contador AsincronoDocumento16 páginasContador AsincronoDANIEL ANTONIO DANIEL ANTONIO DIAZ/SUAZOAún no hay calificaciones
- Diferenciación Usando LímitesDocumento2 páginasDiferenciación Usando LímitesYessi HdezAún no hay calificaciones
- Flujos de Señal en Sistemas de Control ModernoDocumento9 páginasFlujos de Señal en Sistemas de Control ModernoEduardo Lopez AntonioAún no hay calificaciones
- Clase4 Tema2.Transformaciones EspacialesDocumento64 páginasClase4 Tema2.Transformaciones EspacialesKaren July Riera GAún no hay calificaciones
- Capitulo6 - HERRAMIENTAS MATEMATICAS DEL ROBOTDocumento46 páginasCapitulo6 - HERRAMIENTAS MATEMATICAS DEL ROBOTDanny LopezAún no hay calificaciones
- T4 Herramientas Matemáticas para La Localizació Espacial - OCW - Revision PDFDocumento79 páginasT4 Herramientas Matemáticas para La Localizació Espacial - OCW - Revision PDFLuisAún no hay calificaciones
- Clase5 Tema2.Transformaciones HomogéneasDocumento69 páginasClase5 Tema2.Transformaciones HomogéneasKaren July Riera GAún no hay calificaciones
- Teorías Del Aprendizaje UnadDocumento2 páginasTeorías Del Aprendizaje UnadSilvia Patricia Martinez AmayaAún no hay calificaciones
- Asignación de GruposDocumento2 páginasAsignación de GruposCeip El Santo PabloAún no hay calificaciones
- La Adicción Por La DelgadezDocumento3 páginasLa Adicción Por La DelgadezMoises LocoAún no hay calificaciones
- Disertacion Filosofica de BarbieDocumento2 páginasDisertacion Filosofica de Barbienicolasdelafuente07Aún no hay calificaciones
- Unach Ec Iamb 2016 0004 PDFDocumento412 páginasUnach Ec Iamb 2016 0004 PDFEliethAún no hay calificaciones
- Ejercicio de Silva MetodoDocumento7 páginasEjercicio de Silva MetodoHeidy0% (1)
- Modulo V-Concepto de Operaciones de Emergencia de Acuerdo Al Tipo de EmergenciaDocumento27 páginasModulo V-Concepto de Operaciones de Emergencia de Acuerdo Al Tipo de EmergencianormaAún no hay calificaciones
- Teoria de La CienciaDocumento208 páginasTeoria de La CienciaAndrés Eduardo Pimentel Frías100% (1)
- Proyecto FinalDocumento3 páginasProyecto Finaledwin gomezAún no hay calificaciones
- Alanya PsDocumento44 páginasAlanya Psblass saenzAún no hay calificaciones
- Foro Semana 5 y 6 Matematicas FinancieraDocumento2 páginasForo Semana 5 y 6 Matematicas Financieraarre puma reebookAún no hay calificaciones
- Instrumento de Evaluacion Lista de Cotejo RubriucaDocumento7 páginasInstrumento de Evaluacion Lista de Cotejo RubriucatioozkyAún no hay calificaciones
- Entrenamientos Pliometricos PorterosDocumento12 páginasEntrenamientos Pliometricos PorterosEjercicios Para El Portero100% (1)
- REGISTRO AREA CIENCIA Y TECNOLOGÍA-LiteralDocumento12 páginasREGISTRO AREA CIENCIA Y TECNOLOGÍA-LiteralCesar Augusto SUCARI QUISPEAún no hay calificaciones
- Body GuardDocumento2 páginasBody GuardDIANA CAROLINA ALVAREZ PUPIALESAún no hay calificaciones
- TRABAJO T1 - ArquitecturaDocumento4 páginasTRABAJO T1 - ArquitecturaPatricia Lizbeth Abanto LinaresAún no hay calificaciones
- Incidencia Del Plan Lector Como Contenido CurricularDocumento20 páginasIncidencia Del Plan Lector Como Contenido CurricularHéctor Iván Guerrero JiménezAún no hay calificaciones
- Taller Capital SimbólicoDocumento5 páginasTaller Capital SimbólicoJuan MedinaAún no hay calificaciones
- Cartilla Hidrocarburos RegionalCentroDocumento52 páginasCartilla Hidrocarburos RegionalCentroDiana Carolina Rivera CastilloAún no hay calificaciones