También podría gustarte
- Metodos NumericosDocumento10 páginasMetodos NumericosJesusAún no hay calificaciones
- (Primer Evaluación) ...Documento12 páginas(Primer Evaluación) ...Israel Guevara AguilarAún no hay calificaciones
- Ecuaciones Diferenciales de Orden SuperiorDocumento22 páginasEcuaciones Diferenciales de Orden SuperiorangelAún no hay calificaciones
- Taller1 2020 1 PDFDocumento13 páginasTaller1 2020 1 PDFCristian DuarteAún no hay calificaciones
- Ecuaciones Diferenciales Ordinarias y Métodos Numéricos.Documento19 páginasEcuaciones Diferenciales Ordinarias y Métodos Numéricos.Jonathan Farias100% (1)
- Proyecto Final MATEMADocumento15 páginasProyecto Final MATEMAjhj atjAún no hay calificaciones
- Proyecto FinalDocumento15 páginasProyecto Finaljhj atjAún no hay calificaciones
- Proyecto de Investigación TucumeDocumento9 páginasProyecto de Investigación TucumejaberysAún no hay calificaciones
- Unidad 1 Ecuaciones DiferencialesDocumento17 páginasUnidad 1 Ecuaciones DiferencialesKevin AldereteAún no hay calificaciones
- Presentacion Ec. Diferen-Unidad IDocumento28 páginasPresentacion Ec. Diferen-Unidad IJat VA100% (1)
- Aplicaciones de Ecuacion Diferenciales en La Ingenieria de SistemasDocumento10 páginasAplicaciones de Ecuacion Diferenciales en La Ingenieria de SistemasRodner Ronco GalindoAún no hay calificaciones
- Investtigacion Unidad 1Documento5 páginasInvesttigacion Unidad 1Alexis LavariegaAún no hay calificaciones
- DG - U1 Ime - Ecua - Diferen - 391Documento30 páginasDG - U1 Ime - Ecua - Diferen - 391MANUEL ANTONIO CHAVES CLAVIJOAún no hay calificaciones
- Laboratorio N - 4 Ecuaciones Diferenciales Ordinarias (EDO)Documento23 páginasLaboratorio N - 4 Ecuaciones Diferenciales Ordinarias (EDO)Andres Felipe Betancourt LarrahondoAún no hay calificaciones
- Objetivos Generales Ensayo Anahi CedeñoDocumento17 páginasObjetivos Generales Ensayo Anahi CedeñoMelissa CuzmeAún no hay calificaciones
- Aplicaciones de Ecuacion Diferencia A La Ingenieria de SistemasDocumento9 páginasAplicaciones de Ecuacion Diferencia A La Ingenieria de SistemasJulio BonifacioAún no hay calificaciones
- Aplicaciones de Ecuacion Diferenciales en La Ingenieria de SistemasDocumento9 páginasAplicaciones de Ecuacion Diferenciales en La Ingenieria de SistemasRodner Ronco GalindoAún no hay calificaciones
- 0 - 1 Primer Orden Primer Grado Teoría FISDocumento8 páginas0 - 1 Primer Orden Primer Grado Teoría FISl30n4rd0 :bAún no hay calificaciones
- TareaecuacionesfinalDocumento14 páginasTareaecuacionesfinalLy BartholyAún no hay calificaciones
- InvU1 Act1 FMVDocumento17 páginasInvU1 Act1 FMVFloricel Márquez VelázquezAún no hay calificaciones
- Resumen 1Documento11 páginasResumen 1GUILLERMO ALDAIR GALVAN HUERTAAún no hay calificaciones
- Unidad 4 EcuacionesDocumento25 páginasUnidad 4 EcuacionesCarlos KimAún no hay calificaciones
- Ecuación DiferencialDocumento12 páginasEcuación DiferencialJose Vasquez Vargas100% (1)
- Instituto Tecnológico de Cancún Tarea 2 - Tema 2Documento8 páginasInstituto Tecnológico de Cancún Tarea 2 - Tema 2alexis pootAún no hay calificaciones
- Universidad Interamericana para El DesarrolloDocumento12 páginasUniversidad Interamericana para El DesarrolloFelix CanAún no hay calificaciones
- PROTECTOMAT1105Documento25 páginasPROTECTOMAT1105Perez Obando Marco AlejandroAún no hay calificaciones
- Actividad de Construccion Aplicada 1 Ecuaciones DiferencialesDocumento5 páginasActividad de Construccion Aplicada 1 Ecuaciones DiferencialesJaider De Jesus Montenegro TorregrozaAún no hay calificaciones
- Mtea U6Documento22 páginasMtea U6Miguel Angel SalazarAún no hay calificaciones
- Exposición. Busqueda de Incrementos y Metodo Del Punto FijoDocumento21 páginasExposición. Busqueda de Incrementos y Metodo Del Punto FijoGracielaAún no hay calificaciones
- Ecuación DiferencialDocumento9 páginasEcuación DiferencialAnonymous EVhGvaAún no hay calificaciones
- Capítulo I: Primera ParteDocumento4 páginasCapítulo I: Primera ParteIsaias Isac BarreroAún no hay calificaciones
- Fase 2 - Definición de Ecuaciones DiferencialesDocumento37 páginasFase 2 - Definición de Ecuaciones Diferencialesluisa gallegoAún no hay calificaciones
- Puntos A41 CM GrisDocumento6 páginasPuntos A41 CM GrisAnonymous hRxjRU7juAún no hay calificaciones
- Investigación EDOsDocumento9 páginasInvestigación EDOsHugo SeguraAún no hay calificaciones
- Ecuaciones Diferenciales Ordinarias de Primer Orden.Documento19 páginasEcuaciones Diferenciales Ordinarias de Primer Orden.roberto zuritaAún no hay calificaciones
- Actividad U1 Reporte Ricardo Salcedo GomezDocumento6 páginasActividad U1 Reporte Ricardo Salcedo GomezLuis Adrian Ramirez ReyesAún no hay calificaciones
- Definiciones Basicas PDFDocumento7 páginasDefiniciones Basicas PDFCarlos AltamiranoAún no hay calificaciones
- Ecuaciones DiferencialesDocumento24 páginasEcuaciones DiferencialesAdriana FGAún no hay calificaciones
- Ecuaciones DiferencialesDocumento16 páginasEcuaciones DiferencialesDiego A. Pulido RamosAún no hay calificaciones
- Ecuaciones Diferenciales Clase 1Documento14 páginasEcuaciones Diferenciales Clase 1ArmandoQuirozAún no hay calificaciones
- Ecuación Diferencial OrdinariaDocumento11 páginasEcuación Diferencial OrdinariaAnahisAún no hay calificaciones
- Ecuaciones Diferenciales Unidad 1Documento9 páginasEcuaciones Diferenciales Unidad 1Javier MewloCxAún no hay calificaciones
- UIA1Documento58 páginasUIA1Enmanuel NavarroAún no hay calificaciones
- Ecuaciones Diferenciales en La Física Metodos Matematicos Didier AlejandroDocumento91 páginasEcuaciones Diferenciales en La Física Metodos Matematicos Didier AlejandroDidier Alejandro Patiño Rodriguez60% (5)
- Trabajo de AlgebraDocumento14 páginasTrabajo de AlgebraKenchi OcañaAún no hay calificaciones
- ReporteDocumento7 páginasReporteIvonne FélixAún no hay calificaciones
- Investigacion Unidad 1 Ecuaciones DifDocumento19 páginasInvestigacion Unidad 1 Ecuaciones DifCristian Ramirez HerreraAún no hay calificaciones
- Informe EcuacionesDocumento7 páginasInforme EcuacionesJair Jose Luna SuarezAún no hay calificaciones
- Informe CalculoDocumento9 páginasInforme CalculoElizabeth LijarzaAún no hay calificaciones
- Sesión Ecuacion Diferencial Ordinaria s9Documento4 páginasSesión Ecuacion Diferencial Ordinaria s9Manuel Arevalo VillanuevaAún no hay calificaciones
- PDF 3Documento26 páginasPDF 3roberto zuritaAún no hay calificaciones
- Investigación Unidad 4. Wicab Sandoval David HumbertoDocumento4 páginasInvestigación Unidad 4. Wicab Sandoval David HumbertoDavid WicabAún no hay calificaciones
- Unidad I.Documento47 páginasUnidad I.hjlemusAún no hay calificaciones
- Sistemas de Ecuaciones Diferenciales Lineales Parte 1Documento6 páginasSistemas de Ecuaciones Diferenciales Lineales Parte 1Michael Martines IzquierdoAún no hay calificaciones
- Métodos y Aplicaciones de Ecuaciones DiferencialesDocumento8 páginasMétodos y Aplicaciones de Ecuaciones DiferencialesAlid La SombraAún no hay calificaciones
- Accion de TerremotosDocumento17 páginasAccion de Terremotossantos huancaAún no hay calificaciones
- Ejercicios de Ecuaciones Diferenciales OrdinariasDe EverandEjercicios de Ecuaciones Diferenciales OrdinariasCalificación: 4 de 5 estrellas4/5 (1)
- Peña - Kevin - Hipervisores Virtualbox y VMware WorksationDocumento2 páginasPeña - Kevin - Hipervisores Virtualbox y VMware WorksationKevin PeñaAún no hay calificaciones
- Kevin Peña 8-12-2021Documento7 páginasKevin Peña 8-12-2021Kevin PeñaAún no hay calificaciones
- Prueba 3er ParcialDocumento4 páginasPrueba 3er ParcialKevin PeñaAún no hay calificaciones
- Prueba LineaDocumento4 páginasPrueba LineaKevin PeñaAún no hay calificaciones
- Metología P1Documento255 páginasMetología P1Kevin PeñaAún no hay calificaciones
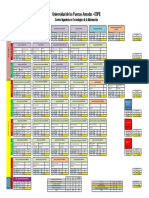
- Malla Ajustada Tecnologias InformacionDocumento1 páginaMalla Ajustada Tecnologias InformacionKevin PeñaAún no hay calificaciones
- Sistemas Operativos Tercer ParcialDocumento28 páginasSistemas Operativos Tercer ParcialKevin PeñaAún no hay calificaciones
- Lección SO Tercer ParcialDocumento4 páginasLección SO Tercer ParcialKevin PeñaAún no hay calificaciones
- Potencia en AlternaDocumento13 páginasPotencia en AlternaJoel VelardeAún no hay calificaciones
- Tarea 1Documento7 páginasTarea 1Cynthia Huallpa GarcíaAún no hay calificaciones
- Semana 4 - Electrotecnia - Resistencia Electrica - Conexiones PDFDocumento31 páginasSemana 4 - Electrotecnia - Resistencia Electrica - Conexiones PDFKatherine PalaciosAún no hay calificaciones
- Ejercicios Taller No. 3 Procesos Industriales II Resueltos A Enviar A EstudiantesDocumento9 páginasEjercicios Taller No. 3 Procesos Industriales II Resueltos A Enviar A EstudiantesBRENDY GONZALEZAún no hay calificaciones
- Informe - Delcor - Bomba Weg 3KWDocumento2 páginasInforme - Delcor - Bomba Weg 3KWHugo Zunini VasquezAún no hay calificaciones
- Laboratorio #5Documento7 páginasLaboratorio #5Daniel Diaz CastilloAún no hay calificaciones
- Galvani y La Electricidad Animal T6 A1Documento1 páginaGalvani y La Electricidad Animal T6 A1Pedro Bustillos QuintanaAún no hay calificaciones
- Momento de Una Fuerza Respecto A Un EjeDocumento7 páginasMomento de Una Fuerza Respecto A Un EjeAlexander CumanaAún no hay calificaciones
- Repaso San Marcos - Física - Semana 1Documento7 páginasRepaso San Marcos - Física - Semana 1Juan AndresAún no hay calificaciones
- Actividades de Taller de Instalaciones EléctricasDocumento8 páginasActividades de Taller de Instalaciones EléctricasDaniela ChafardetAún no hay calificaciones
- Tarea de Lab Fis IDocumento8 páginasTarea de Lab Fis IErlinzon Estrella SantosAún no hay calificaciones
- Mpe - Semana 8 - Maraton 2023-IDocumento19 páginasMpe - Semana 8 - Maraton 2023-IRo Zair BalCuAún no hay calificaciones
- Hoja de CalculosDocumento54 páginasHoja de Calculosedgar ortizAún no hay calificaciones
- MICRÓMETRO o PALMERDocumento13 páginasMICRÓMETRO o PALMERJose ArreagaAún no hay calificaciones
- Guia PEP 3 Termodinamica PDFDocumento3 páginasGuia PEP 3 Termodinamica PDFLuis Xavier Cortes RodriguezAún no hay calificaciones
- Lineas EquipopotencialesDocumento9 páginasLineas EquipopotencialesYEISON NICOLAS CAMACHO MORENOAún no hay calificaciones
- Recur SoDocumento15 páginasRecur SoYoselin Moy MuchiaAún no hay calificaciones
- Lab 1b - Seguridad - Guia - 03a 03Documento5 páginasLab 1b - Seguridad - Guia - 03a 03Abel RodriguezAún no hay calificaciones
- Prueba 2 2020 Saber 11Documento3 páginasPrueba 2 2020 Saber 11Brandon ArmeroAún no hay calificaciones
- Destilación A Presión ReducidaDocumento8 páginasDestilación A Presión ReducidaPablo Ramírez92% (13)
- Análisis Por Métodos Espectroscópicos y Estudio Del Proceso de Envejecimiento de Aceites Esenciales de Cítricos PDFDocumento321 páginasAnálisis Por Métodos Espectroscópicos y Estudio Del Proceso de Envejecimiento de Aceites Esenciales de Cítricos PDFMario MatuteAún no hay calificaciones
- Equipo de CBR 1Documento14 páginasEquipo de CBR 1RobertoIB81Aún no hay calificaciones
- Consideraciones de Diseño ETABSDocumento3 páginasConsideraciones de Diseño ETABSJorge MAún no hay calificaciones
- Taller Calorimetria y CalorDocumento2 páginasTaller Calorimetria y CalorELKIN DIAZAún no hay calificaciones
- M.O RobertDocumento25 páginasM.O RobertEmanuel CardonaAún no hay calificaciones
- Aplicaciones de La Serie de FourierDocumento6 páginasAplicaciones de La Serie de FourierDAVID ALBERTO MARTINEZ PEREZAún no hay calificaciones
- Problemas Eléctricos 1Documento7 páginasProblemas Eléctricos 1Fernanda GómezAún no hay calificaciones
- Evidencia 11 Aleaciones Dentales y Ceras DentalesDocumento4 páginasEvidencia 11 Aleaciones Dentales y Ceras DentalesVanessa GarzaAún no hay calificaciones
- Ejercicios DensidadDocumento5 páginasEjercicios DensidadEnrique RoblesAún no hay calificaciones
- Utilización de La CrioterapiaDocumento3 páginasUtilización de La CrioterapiaJuampa AcuñaAún no hay calificaciones