También podría gustarte
- Manual ElectrotecniaDocumento13 páginasManual ElectrotecniaWalter Enrique BocelAún no hay calificaciones
- Examen Muestra - SeneamDocumento10 páginasExamen Muestra - Seneamjesto100% (1)
- Laboratorio 2 PDFDocumento11 páginasLaboratorio 2 PDFmilenysperez100% (1)
- Sistema de Control Realimentado Sobre Reactor Químico Continuamente Agitado (CSTR) .Documento6 páginasSistema de Control Realimentado Sobre Reactor Químico Continuamente Agitado (CSTR) .Felipe RojasAún no hay calificaciones
- Guia de Laboratorio #4 TURBINAS FRANCISDocumento15 páginasGuia de Laboratorio #4 TURBINAS FRANCISEdwin CondoriAún no hay calificaciones
- Electro Dina MicaDocumento29 páginasElectro Dina MicamartinAún no hay calificaciones
- Tarea 1Documento3 páginasTarea 1Hugo Alejandro Carrasco Berumen0% (1)
- Estimacion de Estado de Un Sistema de PotenciaDocumento16 páginasEstimacion de Estado de Un Sistema de PotenciaEdwin Eduardo AguileraAún no hay calificaciones
- Cuarta Práctica Calificada de Estatica y DinamicaDocumento19 páginasCuarta Práctica Calificada de Estatica y DinamicawalmerAún no hay calificaciones
- T4 IPD 412-Sandoval GermánDocumento5 páginasT4 IPD 412-Sandoval GermánGermán Sandoval AndradeAún no hay calificaciones
- Ensayo Electronica de PotenciaDocumento4 páginasEnsayo Electronica de PotenciaAlfonso Aguilar FuentesAún no hay calificaciones
- Conceptos Basicos Sobre Sistemas Electricos y ProteccionesDocumento46 páginasConceptos Basicos Sobre Sistemas Electricos y ProteccionesSergio Blanco CorreaAún no hay calificaciones
- Práctica 9 MOTOR SINCRONODocumento4 páginasPráctica 9 MOTOR SINCRONOGorch MarrokoAún no hay calificaciones
- Estabilidad NeplanDocumento12 páginasEstabilidad NeplanDario ArangoAún no hay calificaciones
- 3.09 Bateria de Pilas en Serie y en ParaleloDocumento2 páginas3.09 Bateria de Pilas en Serie y en ParaleloDanStrangerAún no hay calificaciones
- Ampliación en La Transformación SET ZarumillaDocumento9 páginasAmpliación en La Transformación SET ZarumillaalexisAún no hay calificaciones
- Trabajo SEP Plan Diurno 2017Documento4 páginasTrabajo SEP Plan Diurno 2017Jorge Muñoz AguilaAún no hay calificaciones
- Práctica Distribución de La Energía EléctricaDocumento5 páginasPráctica Distribución de La Energía EléctricaDavid ToledanoAún no hay calificaciones
- Los Parámetros Del Circuito y La Curva de Magnetización Del Transformador de Distribución de 120Documento8 páginasLos Parámetros Del Circuito y La Curva de Magnetización Del Transformador de Distribución de 120Alain VegganburyAún no hay calificaciones
- Generador 4Documento66 páginasGenerador 4humentoAún no hay calificaciones
- Devanados AmortiguadoresDocumento3 páginasDevanados Amortiguadoresdarwinbravo2172Aún no hay calificaciones
- Trabajo de Investigación Máquinas Eléctricas IIDocumento7 páginasTrabajo de Investigación Máquinas Eléctricas IIAlex Laftar FlowAún no hay calificaciones
- Operación de Los Generadores SincrónicosDocumento56 páginasOperación de Los Generadores SincrónicosjimmyAún no hay calificaciones
- Capitulo 2.8 Estabilidad MultimaquinasDocumento16 páginasCapitulo 2.8 Estabilidad Multimaquinasmayquer lin delgadillo perez100% (1)
- AAC - Conductores de Aluminio - Cable TriplexDocumento3 páginasAAC - Conductores de Aluminio - Cable TriplexCesar TiAún no hay calificaciones
- INVESTIGACIONDocumento6 páginasINVESTIGACIONAnonymous NL7KTamAún no hay calificaciones
- Unidades de PropiedadDocumento33 páginasUnidades de PropiedadJuan EstebanAún no hay calificaciones
- Dinamica Sistemas de PotenciaDocumento15 páginasDinamica Sistemas de PotenciaLuz Maria ValdezAún no hay calificaciones
- Tarea5 ArmonicasDocumento7 páginasTarea5 ArmonicasRicardoHernándezVidalAún no hay calificaciones
- Informe 3 Circuitos IIDocumento6 páginasInforme 3 Circuitos IIwarmichaelAún no hay calificaciones
- IEEE - Transformadores - Unidad 2Documento6 páginasIEEE - Transformadores - Unidad 2Alejandro Herrera SanchezAún no hay calificaciones
- Leccion Acumulativa EHDDocumento3 páginasLeccion Acumulativa EHDHomeroOjedaAún no hay calificaciones
- Generación y Medida de Altos VoltajesDocumento8 páginasGeneración y Medida de Altos VoltajesGeovass RockAún no hay calificaciones
- Introducción - Modelado de Ctos en ATPDocumento12 páginasIntroducción - Modelado de Ctos en ATPNatalia AlzateAún no hay calificaciones
- Informe Calculo Mecanico, L.T. Flores Cristian 9no UTCDocumento11 páginasInforme Calculo Mecanico, L.T. Flores Cristian 9no UTCCristian Gustavo FloresAún no hay calificaciones
- Apuntes SEP UBBDocumento110 páginasApuntes SEP UBBJosé Ignacio PastenAún no hay calificaciones
- Circuitos ResonantesDocumento15 páginasCircuitos ResonantesJuan MaAún no hay calificaciones
- Grupo2 Preinf6Documento3 páginasGrupo2 Preinf6sebatianAún no hay calificaciones
- Estudio Coordinacion 2002Documento122 páginasEstudio Coordinacion 2002Rolando Henry Flores CamavilcaAún no hay calificaciones
- Conexiones EspecialesDocumento12 páginasConexiones EspecialesalejandroAún no hay calificaciones
- TierrasDocumento0 páginasTierrasJose Francisco FloresAún no hay calificaciones
- Circuito OscilanteDocumento9 páginasCircuito OscilanteAliMontilva100% (1)
- Estabilidad Problema 5Documento3 páginasEstabilidad Problema 5Denis MelendezAún no hay calificaciones
- Informe 6 Labo de Circuitos 2Documento25 páginasInforme 6 Labo de Circuitos 2prince zamudioAún no hay calificaciones
- Yox PracticaDocumento4 páginasYox PracticaYox FloresAún no hay calificaciones
- Modernización Central Carlos MoraDocumento12 páginasModernización Central Carlos Morafreddy riveraAún no hay calificaciones
- Mejora Del Factor de PotenciaDocumento3 páginasMejora Del Factor de PotenciaGiancarlosAún no hay calificaciones
- Una Catapulta de Avión Es Un Dispositivo Usado para Lanzar El AviónDocumento3 páginasUna Catapulta de Avión Es Un Dispositivo Usado para Lanzar El AviónDavidHenryGonzálezAún no hay calificaciones
- ELECTRODocumento9 páginasELECTROpathy cocreAún no hay calificaciones
- Ieee6o2 I2 RuedachristianDocumento10 páginasIeee6o2 I2 RuedachristianChristian RuedaAún no hay calificaciones
- Multiplicador de Voltaje LabDocumento8 páginasMultiplicador de Voltaje LabCarlos Sarmiento MelgarejoAún no hay calificaciones
- Informe de Laboratorio de Redes TrifasicasDocumento7 páginasInforme de Laboratorio de Redes Trifasicasriki12345678Aún no hay calificaciones
- Flujo de PotenciaDocumento1 páginaFlujo de Potenciajose_love_1990Aún no hay calificaciones
- Informe de Proyecciones de Precios de Combustibles 01-12-2021Documento12 páginasInforme de Proyecciones de Precios de Combustibles 01-12-2021Sebastián TobarAún no hay calificaciones
- INFORME CONTROL 1 - Control de Velocidad Motor DCDocumento7 páginasINFORME CONTROL 1 - Control de Velocidad Motor DCLaura Marcela ReyesAún no hay calificaciones
- Unidad 1. Generalidades de Las Centrales EléctricasDocumento12 páginasUnidad 1. Generalidades de Las Centrales EléctricasAlex Mendoza PulidpAún no hay calificaciones
- Ee375 3C 2014 IDocumento1 páginaEe375 3C 2014 IAntony MendezAún no hay calificaciones
- Cables ACSR 1Documento1 páginaCables ACSR 1saiko_searchAún no hay calificaciones
- AUTOINDUCTANCIADocumento5 páginasAUTOINDUCTANCIAaurelioAún no hay calificaciones
- Aplicación Del Control de Modos Deslizantes A Inversores Monofásicos Operando en Modo IslaDocumento8 páginasAplicación Del Control de Modos Deslizantes A Inversores Monofásicos Operando en Modo Islajosemat79Aún no hay calificaciones
- Transitorios ElectromagnéticosDocumento2 páginasTransitorios ElectromagnéticosYasmin CarolinaAún no hay calificaciones
- Tipo de Subestaciones EléctricasDocumento15 páginasTipo de Subestaciones EléctricasDAVIDAún no hay calificaciones
- Comportamiento de La Estabilidad Dinámica en El Sistema deDocumento9 páginasComportamiento de La Estabilidad Dinámica en El Sistema deDanielAlejandroRamosQueroAún no hay calificaciones
- Transformaciones LinealesDocumento12 páginasTransformaciones LinealesSalexg GeovannyAún no hay calificaciones
- Espacios Vectoriales Con Producto InternoDocumento21 páginasEspacios Vectoriales Con Producto InternoSalexg GeovannyAún no hay calificaciones
- Ejercicios para Repasar7 Producto InternoDocumento3 páginasEjercicios para Repasar7 Producto InternoSalexg Geovanny100% (1)
- CYMEManualdereferenciaJU PDFDocumento466 páginasCYMEManualdereferenciaJU PDFSalexg GeovannyAún no hay calificaciones
- Lecture 1 IntDocumento23 páginasLecture 1 IntSalexg GeovannyAún no hay calificaciones
- Cantos CarlosDocumento12 páginasCantos CarlosSalexg GeovannyAún no hay calificaciones
- Lec1 13 06 14Documento2 páginasLec1 13 06 14Salexg Geovanny100% (2)
- Instalaciones IndustrialesDocumento42 páginasInstalaciones IndustrialesSalexg Geovanny100% (1)
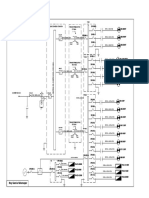
- Diagrama UnifilarDocumento1 páginaDiagrama UnifilarSalexg GeovannyAún no hay calificaciones
- II BIM - 5to. Año - FIS - Guía 7 - Energía MecánicaDocumento9 páginasII BIM - 5to. Año - FIS - Guía 7 - Energía Mecánicafreddynp1100% (3)
- Guia 4 Composicion y Resolucion de FuerzasDocumento4 páginasGuia 4 Composicion y Resolucion de FuerzasEdgar Dario ObandoAún no hay calificaciones
- 10 Taller CN Física 11 - Estática y DinámicaDocumento6 páginas10 Taller CN Física 11 - Estática y DinámicaTecnologías Apropiadas Vulcano - Tecno VulcanoAún no hay calificaciones
- 5.-Material Didactico 2a Categoría Técnico MecánicoDocumento324 páginas5.-Material Didactico 2a Categoría Técnico MecánicoYahirArteGonzAún no hay calificaciones
- CARO - Continuidad de La VidaDocumento137 páginasCARO - Continuidad de La VidaKaren RamirezAún no hay calificaciones
- Áreas de La FísicaDocumento2 páginasÁreas de La Físicafoy222100% (14)
- Capitulo 1 Relatividad Miguel AlcubierreDocumento50 páginasCapitulo 1 Relatividad Miguel AlcubierreSalomón Isaí Velázquez BasultoAún no hay calificaciones
- Temas para El Examen-FisicaDocumento122 páginasTemas para El Examen-FisicaErika MolinaAún no hay calificaciones
- CinematicaDocumento14 páginasCinematicaJHOJAN ANTONI COTRINA JUIPAAún no hay calificaciones
- Movimiento Rectilineo UniformeDocumento5 páginasMovimiento Rectilineo Uniformecamila tinoco lemus100% (1)
- Cap. 5 Ejercicios Resueltos-Movimiento CircularDocumento13 páginasCap. 5 Ejercicios Resueltos-Movimiento CircularAngela Chui cruz100% (2)
- Silabo de Dinamica Fic 2022-IDocumento10 páginasSilabo de Dinamica Fic 2022-INick FabianAún no hay calificaciones
- Cuaderno Alum NoDocumento21 páginasCuaderno Alum Noisasan992844Aún no hay calificaciones
- LABORATORIO 2 - Pendulo SimpleDocumento5 páginasLABORATORIO 2 - Pendulo SimpleLunaAún no hay calificaciones
- Super ImanesDocumento10 páginasSuper ImanesRey ArturoAún no hay calificaciones
- Guia Aprendizaje - 3 Fisica - 10a - Dinamica - Conceptos - Leyes de Newton - 7 - 07Documento6 páginasGuia Aprendizaje - 3 Fisica - 10a - Dinamica - Conceptos - Leyes de Newton - 7 - 07Valentina FigueroaAún no hay calificaciones
- Fuerza Magnética Que Actúa Sobre Un Conductor Que Transporta CorrienteDocumento2 páginasFuerza Magnética Que Actúa Sobre Un Conductor Que Transporta CorrienteMateria GrisAún no hay calificaciones
- Guia Autoaprendizaje Estudiante 1er Bto Ciencia f1 s4Documento5 páginasGuia Autoaprendizaje Estudiante 1er Bto Ciencia f1 s4Rebe FuentesAún no hay calificaciones
- Resumen Tubo de PitotDocumento3 páginasResumen Tubo de PitotjessicaAún no hay calificaciones
- Guía de Física ''Leyes de Newton'' Teoría y Ejercicios.Documento10 páginasGuía de Física ''Leyes de Newton'' Teoría y Ejercicios.A.eAún no hay calificaciones
- Student EsDocumento4 páginasStudent EsJhon SerranoAún no hay calificaciones
- Potencia y Par Motor de Los MotoresDocumento2 páginasPotencia y Par Motor de Los MotoresEsteban VeraAún no hay calificaciones
- Diseño Intervencion SocialDocumento12 páginasDiseño Intervencion SocialAgustina ValenzuelaAún no hay calificaciones
- F2 S03 PPT Ondas MecanicasDocumento27 páginasF2 S03 PPT Ondas MecanicasFREDDY ORLANDO GARCIA ALVAAún no hay calificaciones
- Fiorella La PerraDocumento13 páginasFiorella La PerraSanmy Choque CorreaAún no hay calificaciones
- Unidad-De-Aprendizaje 1°Documento13 páginasUnidad-De-Aprendizaje 1°Luisa RomeroAún no hay calificaciones
- FISICA GRADO 11 GUIA No. 1Documento29 páginasFISICA GRADO 11 GUIA No. 1Elena de TroyaAún no hay calificaciones