0% encontró este documento útil (0 votos)
371 vistas24 páginasTrabajo Virtual
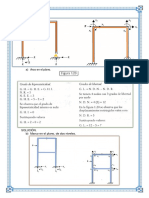
Este documento trata sobre el trabajo virtual y su aplicación a cuerpos rígidos. Explica que el trabajo virtual permite calcular deformaciones donde el método de trabajo real no es posible. También resume el principio de trabajo virtual enunciado por Johann Bernoulli y describe cómo se aplica a cadenas cinemáticas y al análisis estructural mediante el método de desplazamiento. Finalmente, analiza la aplicación a cuerpos rígidos partiendo de las leyes de Newton.
Cargado por
FrancibelDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
0% encontró este documento útil (0 votos)
371 vistas24 páginasTrabajo Virtual
Este documento trata sobre el trabajo virtual y su aplicación a cuerpos rígidos. Explica que el trabajo virtual permite calcular deformaciones donde el método de trabajo real no es posible. También resume el principio de trabajo virtual enunciado por Johann Bernoulli y describe cómo se aplica a cadenas cinemáticas y al análisis estructural mediante el método de desplazamiento. Finalmente, analiza la aplicación a cuerpos rígidos partiendo de las leyes de Newton.
Cargado por
FrancibelDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd